一种上肢训练康复装置
1.本实用新型涉及健身器材技术领域,具体涉及一种上肢训练康复装置。
背景技术:
2.腕能器是用来练腕力的,它可以用来练掌前肌、前臂屈指肌、屈指肌等手小臂上的肌肉群,长期练习可以达到健身强壮前臂的目的。但是针对中风、偏瘫等患者的恢复训练,单独的腕能器及训练动作并不适合,需要针对抓握肌、桡侧腕屈肌或尺侧腕屈肌、桡尺关节的旋前旋后肌、拇长展肌、桡尺关节、肩关节等处的恢复训练,并且同时需要能避免肌肉损伤。
3.针对上述问题,本实用新型提供一种上肢训练康复装置,来满足上述需要,结构简单,易于更换组合训练,占用体积小,安全可靠,使用方便,成本低廉。
技术实现要素:
4.本实用新型的目的在于克服现有技术存在的问题,提供一种上肢训练康复装置。
5.为实现上述技术目的,达到上述技术效果,本实用新型通过以下技术方案实现:
6.一种上肢训练康复装置,包括底座,所述底座上竖向连接有升降柱,所述升降柱的顶端固接有主体结构,所述主体结构上转动地穿接有转轴,所述转轴的一端与功能圆盘相固接在一起,另一端与相应的训练握柄可拆卸配合连接,所述功能圆盘面向主体结构的一端上固接有运动齿轮,所述运动齿轮通过相应的传动结构连接驱动马达的输出端,用于驱动及调节运动齿轮的转动提供辅助力。
7.进一步的,所述主体结构内设有扭力弹簧,所述扭力弹簧的一端固接在主体结构上,另一端固接在转轴或功能圆盘上,用于为功能圆盘的转动提供弹性阻力。
8.进一步的,所述功能圆盘背向主体结构的一端上分别连接有掌伸态托手板和圆柱型握柄,便于握或捏,以适用于掌无法屈曲的人群进行训练旋前旋后肌。
9.进一步的,所述运动齿轮为内圈齿轮,运动齿轮的内齿圈上均布有若干个与其啮合的稳定齿轮,用于稳定运动齿轮,所述传动结构包括变向齿轮和连接齿轮,所述驱动马达的输出端连接并驱动变向齿轮,所述变向齿轮通过连接齿轮啮合带动运动齿轮。
10.进一步的,所述转轴与训练握柄之间的配合方式为螺纹配合,所述转轴的配合处设有螺纹孔,所述训练握柄的配合处设有螺纹段,螺纹段与螺纹孔之间配合旋接。
11.进一步的,所述训练握柄包括有l型握柄、t型握柄和健侧手握柄,所述l型握柄的一个l边端上设有螺纹段,便于和转轴配合连接,所述t型握柄的腹柄端上设有螺纹段,便于和转轴配合连接,所述健侧手握柄的一端上设有螺纹段,便于和转轴配合连接,另一端内侧设有u型握把段,方便抓握。
12.进一步的,所述主体结构一侧的底座上固定有调距板,所述调距板上设有可沿其长度方向调节的前臂托,用于托住前臂,并调节腕肩之间的距离,所述前臂托上设有固定带,用于固定前臂,减少代偿运动。
13.进一步的,所述主体结构与升降柱之间、以及所述前臂托与调距板之间皆为按钮式调位及固定结构。
14.进一步的,所述固定带为卡扣式调节固定带,便于根据不同直径前臂调节松紧。
15.本实用新型的有益效果是:
16.本实用新型装置能针对抓握肌、桡侧腕屈肌或尺侧腕屈肌、桡尺关节的旋前旋后肌、拇长展肌、桡尺关节、肩关节等处进行恢复训练,避免肌肉损伤,并且结构简单,易于更换组合训练,占用体积小,安全可靠,使用方便,成本低廉。
附图说明
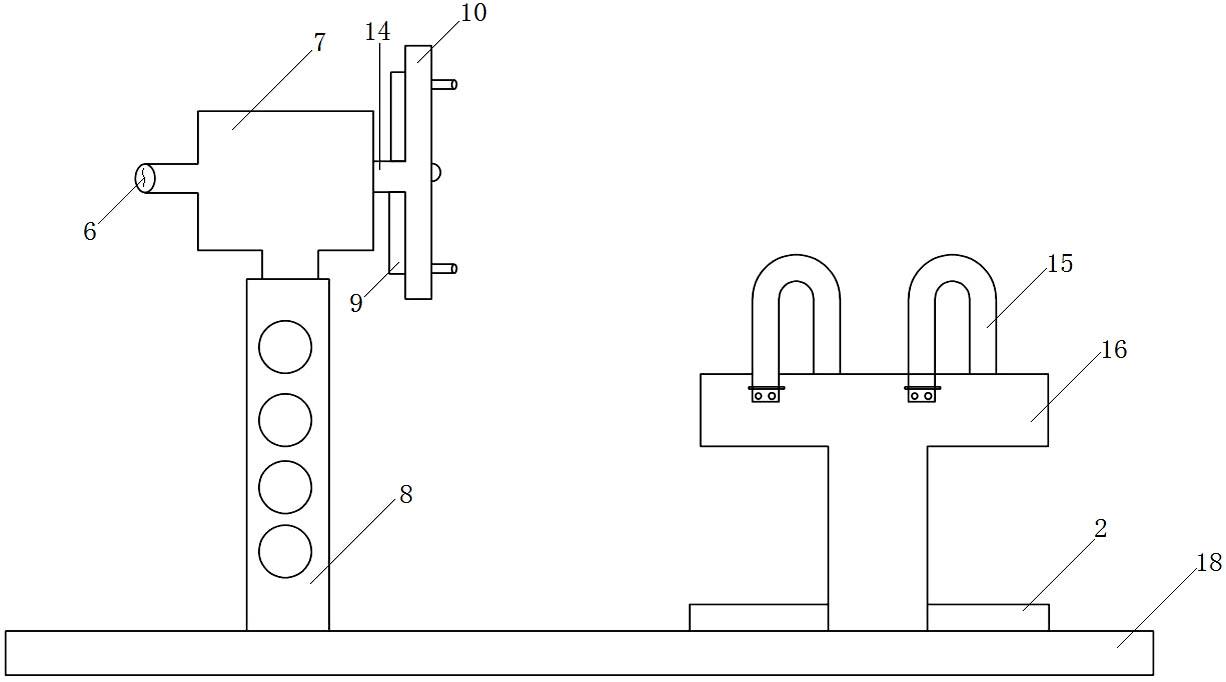
17.图1为本实用新型的整体结构示意图;
18.图2为本实用新型的l型握柄结构图;
19.图3为本实用新型的t型握柄结构图;
20.图4为本实用新型的健侧手握柄结构图;
21.图5为本实用新型的转轴和扭力弹簧结构图;
22.图6为本实用新型的功能圆盘背向主体结构的一端视图;
23.图7为本实用新型的前臂托处的俯视图;
24.图8为本实用新型的运动齿轮通过传动结构连接驱动马达的结构示意图。
25.图中标号说明:1、l型握柄,2、调距板,3、t型握柄,4、健侧手握柄,5、u型握把段,6、螺纹孔,7、主体结构,8、升降柱,9、运动齿轮,10、功能圆盘,11、掌伸态托手板,12、圆柱型握柄,13、扭力弹簧,14、转轴,15、固定带,16、前臂托,17、连接齿轮,18、底座,19、驱动马达,20、稳定齿轮,21、变向齿轮。
具体实施方式
26.下面将参考附图并结合实施例,来详细说明本实用新型。
27.如图1所示,一种上肢训练康复装置,包括底座18,所述底座18上竖向连接有升降柱8,在本实施例中,升降柱8为按钮式调节固定升降柱,所述升降柱8的顶端固接有主体结构7,在本实施例中,主体结构7为正方箱体结构,所述主体结构7上转动地穿接有转轴14,所述转轴14的一端与功能圆盘10相固接在一起,另一端与相应的训练握柄可拆卸配合连接,所述功能圆盘10面向主体结构7的一端上固接有运动齿轮9,所述运动齿轮9通过相应的传动结构连接驱动马达19的输出端,用于驱动及调节运动齿轮9的转动提供辅助力。
28.如图5所示,所述主体结构7内设有扭力弹簧13,所述扭力弹簧13的一端固接在主体结构7上,另一端固接在转轴14或功能圆盘10上,用于为功能圆盘10的转动提供弹性阻力,在本实施例中,扭力弹簧13套在转轴14上,当实施者转动功能圆盘10,就会带动主体结构7内的扭力弹簧13,在康复后期可以施加适当阻力取决于扭力弹簧13的松紧,可以达到更好的肌力训练。
29.如图6所示,所述功能圆盘10背向主体结构7的一端上分别连接有掌伸态托手板11和圆柱型握柄12,便于握或捏,以适用于掌无法屈曲的人群进行训练旋前旋后肌。
30.如图8所示,所述运动齿轮9为内圈齿轮,运动齿轮9的内齿圈上均布有若干个与其啮合的稳定齿轮20,用于稳定运动齿轮9,所述传动结构包括变向齿轮21和连接齿轮17,所
述驱动马达19的输出端连接并驱动变向齿轮21,所述变向齿轮21通过连接齿轮17啮合带动运动齿轮9,在本实施例中,变向齿轮21与相应的变频器组合,以便驱动马达19输出不同的转向或转速,从而实施者可以训练到不同等级的腕部或肩关节运动。
31.所述转轴14与训练握柄之间的配合方式为螺纹配合,所述转轴14的配合处设有螺纹孔6,所述训练握柄的配合处设有螺纹段,螺纹段与螺纹孔6之间配合旋接。
32.如图2至图4所示,所述训练握柄包括有l型握柄1、t型握柄3和健侧手握柄4,所述l型握柄1的一个l边端上设有螺纹段,便于和转轴14配合连接,所述t型握柄3的腹柄端上设有螺纹段,便于和转轴14配合连接,所述健侧手握柄4的一端上设有螺纹段,便于和转轴14配合连接,另一端内侧设有u型握把段5,方便抓握。
33.如图1和图7所示,所述主体结构7一侧的底座18上固定有调距板2,在本实施例中,调距板2为按钮式左右调距板,所述调距板2上设有可沿其长度方向调节的前臂托16,用于托住前臂,并调节腕肩之间的距离,所述前臂托16上设有固定带15,用于固定前臂,减少代偿运动,在本实施例中,固定带15采用插扣式松紧带调节松紧度,可以根据实施者的前臂围度进行调节。
34.所述主体结构7与升降柱8之间、以及所述前臂托16与调距板2之间皆为按钮式调位及固定结构。
35.所述固定带15为卡扣式调节固定带,便于根据不同直径前臂调节松紧。
36.本实用新型原理及使用过程
37.如图1和图7所示,可以将实施者一侧的前臂固定在前臂托16上,松紧可根据前臂围度通过固定带15调节,同时可以根据实施者的使用情况通过升降柱8调节主体结构7的高度、以及通过调距板2调节前臂托16的左右位置,以便达到舒适的体位和肢体摆放。
38.实施者可以选择五种不同的训练方式,即锻炼到不同的抓握肌;第一种方式,如图1和图2所示,使用l型握柄1,l型握柄1的螺纹段旋拧到功能圆盘10中央的螺纹孔6内,实施者可以全掌屈曲抓握,进行桡尺关节的旋前、旋后运动;
39.第二种方式,如图1和图3所示,使用t型握柄3,将t型握柄3的螺纹段旋拧到功能圆盘10中央的螺纹孔6内,实施者可以选择半掌屈曲抓握,可适用于桡侧腕屈肌或尺侧腕屈肌任一肌肉损伤的情况,同时进行旋前、旋后的运动;
40.第三种方式,如图6所示,使用功能圆盘10一端上的掌伸态托手板11,适用于掌不能屈曲的人群,掌伸态托手板11与功能圆盘10端面之间形成的椭圆孔大小与掌面大小相适配,靠掌伸态托手板11两侧的挡板使功能圆盘10旋转,从而达到锻炼到桡尺关节的旋前旋后肌;
41.第四种方式,如图6所示,使用功能圆盘10一端上的圆柱型握柄12,圆柱型握柄12的表面为粗糙接触面,可以在掌屈情况下抓握,进行三指捏,适应于拇长展肌等肌肉损伤情况;
42.第五种方式,如图1和图4所示,以健侧手为动力,带动患侧手的旋前、旋后,将健侧手握柄4旋拧至螺纹孔6内,转动可以带动功能圆盘10转动,可以选择不同的抓握方式,进行被动运动,以达到自己给自己做被动运动效果,也可以将前臂托16取下,仅仅留下功能圆盘10,在其两侧旋拧上不同的训练握柄,来进行桡尺关节、肩关节的环转运动。
43.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本
领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1