一种建筑用木梁加工方法与流程
1.本发明属于建筑行业木梁加工技术领域,尤其涉及一种基于工业机器人开槽机加工木梁方法技术领域。
背景技术:
2.建筑行业,尤其涉及到园林、室内造型、大型场馆设计等多用到大型木梁进行搭建,对木梁开槽是木结构搭建的一种常用技术手段,这样可以减少金属对木梁的固定和连接,整体提高木梁搭建的外观,显得更天然、庄重。
3.现有木结构木梁开槽多采用人工手持或固定轨道的方法。就手持开槽设备而言,木梁长度一般10米左右,需要多道、多条开槽,凭借人工的劳动强度很难一次性连续加工开槽,且一般开槽设备连续开槽由于不能持续供油降低开槽设备的使用寿命,产品一致性较差。总体来说,手持开槽的缺点是:1、手持开槽范围有限;2、手持开槽拼接精度差,产品开槽质量参差不齐;3、切削过程中粉尘及颗粒物影响工人身体健康;4、生产工况复杂,存在不安全因素。固定轨道开槽精度好,但需要根据不同工件搭建不同的开槽轨道;且大型的开槽轨道安装时间长、难以移动。
4.总体来说,现有的建筑木结构开槽方法,虽然应用了各种类型的开槽机器,但人工劳动强度依然很大,开槽精度差。其它的一些自动化开槽也不够柔性。
5.鉴于此,需要提供一种基于工业机器人开槽机加工木梁的方法以解决上述问题。
技术实现要素:
6.本发明的目的就是解决现有技术中存在的不足之处,提供一种基于现代工业机器人技术,将开槽机连接到机器人上,实现柔性木梁开槽。
7.本发明采取的技术方案如下:
8.一种建筑用木梁加工方法,包括以下步骤:
9.1)木梁机械基准定位:用叉车或行车将木梁放到定位工装上,定位压紧,使木梁具有相对唯一的位置;
10.2)地轨机器人检测反馈到位:木梁到位后,利用安装在机器人开槽机上的点激光反馈到位信号;
11.3)开槽机在设定的机器人程序控制下开槽,需要时根据对应木梁的开槽尺寸要求更换开槽机;
12.4)机器人按照程序指令带动开槽机完成木梁的开槽工作,沿地轨回到初始位置,等待其它任务需求;
13.5)木梁的下料:木梁直接下料或在木梁需要的打孔、铣削完毕后下料,更换下一根待加工木梁,重复步骤1)-4)。
14.进一步,步骤1)所述的定位工装是指双滑台移栽机构。将双滑台移栽机构安装在地轨上,可根据木梁的长度做出相应的位移,这样就增加了木梁在长度上的可加工尺寸范
围。
15.步骤2)所述的机器人开槽机是指连接到所述的工业机器人上的开槽机。
16.进一步,步骤3)所述的设定的机器人程序,是指:单次开槽宽度7mm以上时,特别是指单次开槽宽度7~20mm时,以开槽器末端与木梁顶端0~30mm为基准,第一次向下的切削深度(以木梁顶端为基准原点)在0.1~50mm,机器人进给速度5~20mm/s的参数进行切削开槽,然后机器人带动开槽器向上移动排屑,机器人向上提升5~20mm,机器人提升速度5~20mm/s;第二次开槽深度控制在 20~150mm,机器人进给速度5~20mm/s,然后机器人带动开槽器向上移动排屑,机器人向上提升5~20mm,机器人提升速度5~20mm/s;按照第二次开槽控制参数竖向持续开槽直至达到产品需要的槽深;开完一个竖槽,然后横向开槽,直至设定的槽长。
17.更进一步,步骤3)开槽器第一次的向下的切削,开槽器电主轴转速在 1000~5000r/min运行;开槽器第二次的向下的切削,保持电主轴转速在 1000~5000r/min运行;开完一个竖槽后横向开槽时,要有0.1~20mm的重叠量。
18.更进一步,步骤3)s1机器人根据初始值进行开槽,机器人下降,开槽定位深度10~30mm,机器人进给速度8~15mm/s;s2机器人提升5~20mm机器人提升速度15~20mm/s,目的是为了方便排屑,木屑排不出去会导致导板温度过高损坏开槽机;s3机器人下降50~100mm,机器人进给速度8~15mm/s;s4重复s3和 s2直到需要的总槽深;s5机器人提升到木梁顶面上高度大于5mm处,机器人提升速度15~20mm/s。
19.更进一步,步骤3)在木梁加工过程中持续对开槽器的链条供润滑油,可以对开槽机降温,该工序最佳连续工作时间在5小时以内;电主轴转速在 1000-5000r/min运行,其中当电主轴在2500r/min效果较好。
20.进一步,步骤3)所述的设定的另一机器人程序,是指:单次开槽宽度7mm 以下时,竖向连续性开槽,竖向单槽开穿后机器人直接横向连续开槽至设定的槽长。更进一步,机器人开槽下降进给速度4mm/s~15mm/s,直到满足产品切削深度;然后机器人横向移动速度0.1mm/s~20mm/s,直到开槽到所需要的槽长。更进一步,竖向连续性开槽时,开槽器控制电主轴旋转速度在1000~4000r/min。更进一步,控制开槽器电主轴旋转速度2000~4000r/min,机器人横向移动速度5mm/s~20mm/s。
21.步骤3)可依据木梁的材料物理特性、开槽尺寸、时间来选择程序和/或更换开槽机。
22.本发明的有益效果:
23.本发明将工业机器人和开槽机结合在一起,同时采用工业机器人和地轨的配置,解决了复杂的空间开槽姿态和较长木梁开槽够不着的问题。
24.1、使产品的合格率大大提高、保证了开槽的一致性。
25.2、切割开槽适合各种尺寸、大小和形状。
26.3、提高了开槽效率。
27.4、节约了时间,成本和人力。
28.5、减低了劳动强度、保护工人身体健康和安全等。
29.下面结合附图对本发明的具体实施方式举例说明:
附图说明
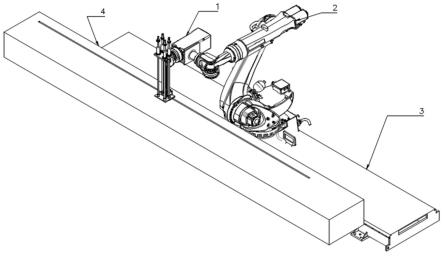
30.图1为本专利实施例提供的木梁大槽宽开槽实施场地布置轴测图。
31.图2为专利实施例提供的木梁大槽宽开槽实施场地俯视图。
32.图3为专利实施例提供的木梁连续开槽场地实施布置轴测图。
33.图4为专利实施例提供的木梁连续开槽场地实施俯视图。
34.图5为本专利实施例提供的木梁大槽宽开槽加工示意图。
35.图6为本专利实施例提供的木梁连续开槽加工示意图。
具体实施方式
36.此处所描述的具体实施例仅仅用于解释本专利的技术方案,而非对公开技术方案的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本公开技术方案相关的部分而非全部结构。
37.在更加详细地讨论示例性实施例之前应当提到的是,实施例中提到的设备部件和/模块本身的结构如果没有详细说明,为本领域技术人员根据现有公开技术可理解或市售产品。
38.以胶合木木梁为例,木梁横向单宽80mm、开槽深度400mm。参考图1、图2 和图5,1为开槽器,2为机器人,3为地轨,4是木梁。本实施例提供的建筑用木梁加工方法,包括以下步骤:
39.(1)木梁机械基准定位:定位工装采用双滑台移栽夹紧定位,双滑台移栽夹紧定位工装安装在地轨上,可根据木梁的长度做出相应的位移。用叉车或行车将木梁放到定位工装上,定位工装定位压紧,使木梁具有相对唯一的位置。
40.(2)地轨机器人检测反馈到位:木梁到位后,利用安装在机器人开槽机上的点激光反馈到位信号。
41.(3)开槽机在机器人程序控制下开槽:单次可加工槽宽7~20mm,单次槽长50~55mm;开槽器多次可加工槽宽最少7mm以上,开槽器有效加工深度0~500mm,此类加工为大槽宽开槽。机器人开槽器末端与木梁顶端20mm为基准,第一次机器人的向下的切削深度(以木梁顶端为基准原点)10~30mm,开槽器电主轴转速在2500r/min运行,机器人进给速度8~15mm/s的参数进行切削开槽;然后机器人向上移动排屑,机器人向上提升20mm;竖向反复开槽直至达到产品需要的槽深;开完一个竖槽,然后横向开槽,需注意要有0~20mm的重叠量。
42.具体程序:
43.步骤a:机器人根据初始值进行开槽,机器人下降,开槽定位深度20mm,机器人进给速度10mm/s;(对于不同材质的木梁、开槽器的锋利程度,可人为设置略不同的机器人进给速度。一般在8~15mm/s区间范围内选择即可,本实施例木梁为胶合木,机器人设定为10mm/s)
44.步骤b:为了方便排屑,机器人提升20mm,机器人提升速度20mm/s; (对于不同材质的木梁、开槽器的锋利程度、机器人提升速度也可略有不同的调整,在15~25mm/s区间范围内选择即可,本实施例木梁为胶合木,机器人设定为20mm/s)
45.步骤c:机器人下降70mm,开槽总深度70mm,机器人进给速度10mm/s;步骤4:机器人提升20mm,机器人提升速度20mm/s;
46.步骤d:机器人在此基础上下降70mm,开槽深度总深度120mm,机器人进给速度10mm/s;
47.步骤e:机器人提升20mm,机器人提升速度20mm/s;
48.步骤f:机器人在此基础上下降70mm,开槽深度总深度170mm,机器人进给速度10mm/s;
49.步骤g:机器人提升20mm,机器人提升速度20mm/s;
50.步骤h:机器人在此基础上下降70mm,开槽深度总深度220mm,机器人进给速度10mm/s;
51.步骤i:机器人提升20mm,机器人提升速度20mm/s;
52.步骤j:机器人在此基础上下降70mm,开槽深度总深度270mm,机器人进给速度10mm/s;
53.步骤k:机器人提升20mm,机器人提升速度20mm/s;
54.步骤l:机器人在此基础上下降70mm,开槽深度总深度320mm,机器人进给速度10mm/s;
55.步骤m:机器人提升20mm,机器人提升速度20mm/s;
56.步骤n:机器人在此基础上下降70mm,开槽深度总深度370mm,机器人进给速度15mm/s;
57.步骤o:机器人提升20mm,机器人提升速度20mm/s;
58.步骤p:机器人在此基础上下降70mm,开槽深度总深度420mm,机器人进给速度10mm/s;
59.步骤q:机器人提升420mm,机器人提升速度20mm/s。
60.在木梁加工过程中持续对链条供润滑油对开槽机降温,该开槽工序最佳连续工作时间在5小时以内。在此木梁加工过程中机器人地轨配合机器移动。此刻机器人位置在初始原点。
61.(4)机器人开槽完成,回原点:机器人在地轨配合下回到初始位置,等待其他任务需求。
62.(5)木梁的下料:当木材开槽、打孔、铣削完毕后下料。
63.以胶合木木梁为例,木梁横向单宽在80mm、开槽宽度5mm、开槽深度400mm。参考图3、图4和图6,1为开槽器,2为机器人,3为地轨,4是木梁。本实施例提供的建筑用木梁加工方法,选择连续开槽,即单槽开穿后机器人直接横向连续开槽。加工程序如下:
64.设置开槽器电主轴旋转速度4000r/min、机器人下降进给速度10mm/s,直到切割深度到400mm,然后机器人横向移动速度10mm/s,直到开到所需要的槽长。在此木梁加工过程中机器人地轨配合机器移动。由于木梁开槽宽度较小,这种可以连续开槽。在木梁加工过程中持续对开槽机供润滑油对开槽机降温,开槽器最佳连续工作时间在5小时以内。
65.单根木梁开槽过程中,可以根据工作时间、开槽尺寸等更换合适的开槽机。
66.以上是对发明的较佳实施进行了举例说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1