扫拖机器人协同控制方法与流程
1.本发明属于居家清洁技术领域,具体地说,是涉及一种扫拖机器人协同控制方法。
背景技术:
2.扫地机器人和拖地机器人能够实现居家自动清洁,减轻用户家务负担。
3.现行室内清洁的方式,或者分别启动扫地机器人执行清扫任务和拖地机器人执行拖地任务,或者采用扫拖地一体化的机器人同时执行扫地和拖地。
4.但上述两种清洁方式分别存在自身的问题,分别采用扫地机器人和拖地机器人时,二者独立工作,各自采用自身的扫描模块扫描并建立地图,继而基于建立的地图规划清扫或拖地路线,导致清洁成本较高;采用扫拖地一体化的机器人,虽然相对两部独立的机器人降低了成本,但是在扫地拖地同时使用时,存在水和灰尘混在一起形成泥浆,导致地面越拖越脏。
技术实现要素:
5.本发明的目的在于提供一种扫拖机器人协同控制方法,基于协同工作站的协同控制,仅由扫地机器人实施扫描建图,协同工作中心基于建图数据分别为扫地机器人规划清扫路线和拖地机器人规划拖地路线,实现拖地机器人与扫地机器人共享建图数据。
6.为解决上述技术问题,本发明采用以下技术方案予以实现:
7.提出一种扫拖机器人协同控制方法,应用于扫拖机器人协同工作站,所述扫拖机器人协同工作站包括:扫地机工作台,负责扫地机器人的充电;拖地机工作台,负责拖地机器人的充电;协同控制中心,负责所述扫地机器人和所述拖地机器人的协同工作;所述方法包括:所述协同控制中心控制所述扫地机器人出站并开启扫描装置;所述扫地机器人基于所述扫描装置获取的扫描数据建图;所述扫地机器人在建图完成后将建图数据发送给所述协同控制中心;所述协同控制中心基于所述建图数据规划所述扫地机器人的清扫路径和所述拖地机器人的拖地路径。
8.进一步的,所述扫地机器人基于所述扫描装置获取的扫描数据建图,具体包括:扫地机器人运行到随机位置后控制其扫描模块按照设定角度转动;获取扫描数据并建图;判断建图是否完整;在不完整时控制所述扫地机器人运行到未扫描到障碍物的位置重复上述步骤直至建图完整。
9.进一步的,所述协同控制中心接收到任务指令后,控制所述扫地机器人出站,并控制其按照规划的清扫路线执行清扫任务;所述任务指令包括清扫指令和拖地指令;在扫地机器人已清扫区域的面积达到设定阈值时,所述协同控制中心控制将拖地机器人的拖布打湿;所述协同控制中心控制拖地机器人出站,并控制其按照规划的拖地路线执行拖地任务。
10.进一步的,在所述协同控制中心控制拖地机器人按照规划的拖地路线执行拖地任务之后,所述方法还包括:在所述扫地机器人和所述拖地机器人存在任务冲突时,所述协同控制中心控制所述拖地机器人停止直至冲突解除后启动。
11.进一步的,判断所述扫地机器人和所述拖地机器人存在任务冲突,具体包括:基于所述扫地机器人的清扫路线和所述拖地机器人的拖地路线,判断所述扫地机器人和所述拖地机器人是否会发生碰撞;若在设定时间内二者会发生碰撞,则判断所述扫地机器人和所述拖地机器人存在任务冲突。
12.进一步的,判断所述扫地机器人和所述拖地机器人存在任务冲突,具体包括:基于所述扫地机器人的清扫路线和所述拖地机器人的拖地路线,判断所述拖地机器人要清洁的区域是否已被所述扫地机器人清扫;若未被清扫,则判断所述扫地机器人和所述拖地机器人存在任务冲突。
13.与现有技术相比,本发明的优点和积极效果是:本发明提出的扫拖机器人协同控制方法中,由扫地机器人出站扫描并建图,建图数据发送给扫拖地机器人协同工作站的协同控制中心,由协同控制中心基于该建图数据同时为扫地机器人规划清扫路线,以及为拖地机器人规划拖地路线,和现有的扫地机器人与拖地机器人各自独立建图的方式相比,本发明基于扫拖地机器人协同工作站的协同控制,共享扫地机器人的建图数据,并基于建图数据分别为二者规划路线,控制二者基于规划的路线协同执行清扫以及拖地任务,使得拖地机器人无需为建图配置扫描模块,降低了整体的清洁成本,且协同控制中心能够基于规划的路线协同控制二者在执行任务时不发生冲突,保证了清洁效果。
14.结合附图阅读本发明实施方式的详细描述后,本发明的其他特点和优点将变得更加清楚。
附图说明
15.图1为本发明提出的扫拖机器人协同工作站的一个实施例的架构图;
16.图2为本发明提出的扫拖机器人协同工作站中垃圾回收装置的一个实施例图;
17.图3为本发明提出的扫拖机器人协同工作站中净水清洗装置的一个实施例图;
18.图4为本发明提出的扫拖机器人协同工作站中污水回收装置的一个实施例图;
19.图5为本发明提出的扫拖机器人协同工作站中污水回收装置的又一个实施例图;
20.图6为本发明提出的扫拖机器人协同建图控制方法的实施例流程图;
21.图7a为本发明提出的扫拖机器人协同工作控制方法的第一个实施例的流程图;
22.图7b为本发明提出的扫拖机器人协同工作控制方法的第二个实施例的流程图;
23.图8为本发明提出的拖地机器人湿度控制方法的一个实施例的流程图;
24.图9为本发明提出的拖地机器人清洁控制方法的一个实施例的流程图;
25.图10为本发明提出的拖地机器人拖布清洗方法的一个实施例流程图;
26.图11为本发明提出的扫地机器人垃圾回收方法的一个实施例流程图;
27.图12为本发明提出的拖地机工作台的一个实施例结构图;
28.图13为本发明提出的拖地机工作台的第二个实施例结构图。
具体实施方式
29.下面结合附图对本发明的具体实施方式作进一步详细的说明。
30.本发明提出的扫拖机器人协同控制方法,应用于如图1所示的扫拖机器人协同工作站中,该协同工作站包括:扫地机工作台1、拖地机工作台2、工作台升降装置3、垃圾回收
装置4、净水清洗装置5、污水回收装置6、协同控制中心7和电源系统8。
31.扫地机工作台1用于实现扫地机器人的充电和垃圾回收;拖地机工作台2用于实现拖地机器人的充电、拖布清洗和污水回收;扫地机工作台1设置于工作台升降装置3的上部,拖地机工作台2设置于工作台升降装置3的下部;工作台升降装置3用于控制扫地机工作台1上升或者下降。
32.在本发明的一些实施例中,扫地机工作台1在前端拥有两个第一金属充电极片,实现给扫地机器人充电的功能。
33.扫地机器人尘盒位置预留一个出尘口,出尘口对应扫地机工作台1上的进尘口,扫地机器人尘盒的出尘口外部使用硅胶垫遮挡,硅胶垫一端与尘盒固定在一起。当扫地机器人在离开工作站进行清洁工作时,扫地机器人内部的风机工作,可以将出尘口外部的硅胶垫吸起,起到密封的作用,同时将地面上的垃圾吸到尘盒。
34.当扫地机器人回到工作站时,垃圾回收装置4的风机工作,会将扫地机器人尘盒出尘口外部的硅胶垫吸开,将尘盒内的垃圾吸出尘盒,通过垃圾回收通道吸到垃圾储藏区的垃圾袋中,实现垃圾回收的功能。
35.在本发明的一些实施例中,拖地机工作台2在前端拥有两个第二金属充电极片,实现给拖地机器人充电的功能。
36.拖地机工作台2上配置有红外信号发射装置,实现拖地机器人以及扫地机器人的回充对位功能。
37.拖地机器人底盘前端有两个可旋转的圆盘,圆盘上可粘贴拖布,拖地机器人内部由一个电机提供圆盘旋转动力,电机转动轴两端均有螺纹,通过齿轮带动两个圆盘同步转动,通过转动拖布实现对地面的清洁作用。或者,拖地机器人底盘的前端和后端均有一块可前后运动的拖板,拖板上可粘贴拖布,拖地机器人内部由一个电机提供拖板前后运动的动力,电机轴的两端固定有转换装置,使电机轴由中心转换到其他位置,结合机械支架,使电机转动时,可以以带动拖板进行前后往复运动,通过使拖板前后往复运动实现对地面的清洁。
38.在本发明的一些实施例中,工作台升降装置3通过伺服电机带动螺杆旋转实现扫地机工作台1上升或下降;或通过扫地机工作台1上的电机带动齿轮转动,实现扫地机工作台1在锯齿状皮带上上升或下降等。
39.扫地机工作台1和拖地机工作台2上均设有限位装置,例如接近传感器,当扫地机工作台1上升到顶端时,触发扫地机工作台1上的第一限位装置,工作台升降装置3停止工作,实现上升限位。当扫地机工作台1下降到底端时,触发拖地机工作台2上的第二限位装置,工作台升降装置3停止工作,实现下降限位。
40.当拖地机器人位于拖地机工作台2或拖地机工作台2上有其它物品时,也会触发拖地机工作台2上的限位装置,使工作台升降装置停止工作,避免挤到拖地机器人或挤坏其它物品。
41.工作台升降装置3内置电动伸缩杆,在扫地机工作台1升到顶端时,电动伸缩杆伸出,支撑扫地机工作台1,避免因停电或损坏工作台升降装置3时导致扫地机工作台1掉落下来。
42.在本发明的一些实施例中,垃圾回收装置4,如图2所示,包括垃圾回收通道41、垃
圾储藏区42、置于垃圾储藏区42的垃圾袋43和风机44;扫地机工作台1上开设有进尘口11,垃圾回收通道41的入口端通过该进尘口11与扫地机器人的尘盒出尘口连接,另一端出口连接到垃圾储藏区42。
43.垃圾袋43通过一个固定板45安装在垃圾储藏区42中,固定板45上开设有尘口46,该尘口46与垃圾回收通道41的出口端通过卡扣、螺旋或其他对接方式连接。该垃圾袋43的主体使用透气不透尘的纸质材质或无纺布材质,优选的制成一次性垃圾袋。
44.风机44设置于垃圾储藏区42的出风口47;当扫地机器人清扫完成回到扫地机工作台1后,风机44启动,将垃圾从扫地机器人的尘盒出尘口吸出,经扫地机工作台1的进尘口11和垃圾回收通道41吸进垃圾袋43中,气体则透过垃圾袋43从出风口47吹出。
45.垃圾袋43配置有在位检测装置48,例如微动开关,当固定板45安装到位后,触发该微动开关,表示垃圾袋43已安装到位,当扫地机器人清扫完成返回扫地机工作台1后,首先检测微动开关是否已经被触发,在微动开关已触发确保垃圾袋43安装到位后,再开启风机44。
46.针对垃圾回收装置4,本发明提出一种扫地机器人垃圾回收方法,如图11所示,包括如下步骤:
47.步骤s111:记录扫地机器人当前清扫任务的清扫时间t
扫
。以及,
48.步骤s112:计算扫地机器人上次清扫任务与当前清扫任务的时间间隔t
扫
。
49.获取扫地机器人上次清扫任务的时间,以及当前清扫任务的时间,计算二者时间间隔t
扫
。
50.步骤s113:基于time1=a1×
t
扫
+a2×
t
扫
,计算垃圾回收装置的风机工作时间。
51.本发明实施例中,垃圾回收装置4的风机44的工作时间,受两次清扫任务的时间间隔以及当前清扫任务的时间的限定,a1和a2可视为对两个时间的权重选择,可通过用户设置来完成,用户可结合室内的实际情况,选择偏重于两次清扫任务的时间间隔的权重大,还是每次清扫任务的时间权重大,例如,用户家中经常实施清扫时,可将当前清扫任务的时间权重设置较大,而若用户家中清扫频率较低,则可将两次清扫任务的时间间隔的权重设置较大。
52.步骤s114:在清扫任务结束后,启动垃圾回收装置的风机工作time1时间。
53.本发明实施例通过扫地机器人当前清扫任务与上次清扫任务的时间间隔t
扫
和当前清扫任务所需时间t
扫
动态调节垃圾回收装置的风机运行时间,可以在扫地频繁或垃圾较少时减少垃圾回收的时间,节省电能;在扫地时间间隔长或扫地时间长时延长垃圾回收的时间,增强回收能力。
54.在本发明的一些实施例中,如图3所示,净水清洗装置5包括净水储藏箱51、净水泵52、净水管53、进气孔54、喷嘴55、水位检测装置56和净水储藏箱在位检测装置57。
55.净水储藏箱51放置在工作站内,留有进气孔和出水口,净水储藏箱51顶端盖子可以打开,方便用户加水;净水储藏箱51的出水口与净水管53的进水口位置对应;喷嘴55安装于拖地机工作台2上,净水管53通过净水泵52连接到喷嘴55上。
56.净水储藏箱51外部有两个第三金属电极片,与工作站的两个金属触点对应,来保证水位检测装置56的供电。水位检测装置56位于净水储藏箱51的内部底端,当水位到达净水储藏箱最底处储水位置时,触发水位检测装置56,起到水位检测的作用。
57.净水储藏箱在位检测装置57由微动开关构成,当净水储藏箱51安装到位时,可触发微动开关,表示净水储藏箱5已安装。
58.当拖地机器人回到工作站时,协同工作中心7基于净水储藏箱在位检测装置57的状态检测到净水储藏箱51已安装时,控制水泵52启动工作,将净水储藏箱内51的净水由水管53吸到喷嘴55,然后将水均匀的喷洒到拖布上。
59.在本发明的一些实施例中,如图12所示,在拖地机工作台2对应拖地机器人拖布位置的表面设置若干凸起21,在对拖布洒水完成后,拖地机器人控制其拖布旋转或震动,与拖地机工作台2上的凸起的表面摩擦,使拖布上的灰尘及污水流下。
60.或,在本发明的一些实施例中,如图13所示,拖地机工作台2对应拖地机器人拖布的位置设置有旋转装置22,该旋转装置包括两个电机,每个电机轴上装有一个转盘,每个转盘表面设置若干凸起21;清洗拖布时,净水清洗装置5的水泵52启动工作,将净水储藏箱51内的净水由水管53吸到喷嘴55,然后将水均匀的喷洒到拖布上,协同控制中心7控制拖地机平台上2的电机启动,带动两个转盘旋转,转盘上的凸起表面与拖布摩擦,使拖布上的灰尘及污水流下。
61.或,在本发明的一些实施例中,在拖地机工作台2对应拖地机器人拖布的位置设置震动装置,且震动装置的表面设置若干凸起,在对拖布洒水完成后,协同控制中心7控制拖地机工作台2的震动装置震动,从而使拖布上的灰尘及污水流下。
62.在本发明的一些实施例中,在净水储藏箱51顶端增加进水接口,可使净水储藏箱直接通过水管与家里的水龙头连接,实现自动加水的功能。
63.在本发明的一些实施例中,净水储藏箱51在位检测装置由霍尔元件及磁铁组成,磁铁安装在净水储藏箱,霍尔元件安装在工作站与磁铁对应的位置上,当净水储藏箱51安装到位时,可触发霍尔元件,表示净水储藏箱已安装。
64.在本发明的一些实施例中,污水回收装置6,如图4所示,包括污水储藏箱61、污水回收泵66、污水回收管62、排气孔63、水位检测装置64和污水储藏箱在位检测装置65。
65.污水储藏箱61放置在工作站内,留有排气孔和进水口,污水储藏箱61顶部盖子可以打开,方便用户将污水倒出,污水储藏箱61的进水口与污水回收管62的出水口位置对应,污水回收管62通过污水回收泵66连接到拖地机工作台2。
66.污水储藏箱61外部有两个第四金属电极片,与工作站的两个金属触点对应,来保证水位检测装置64的供电。
67.水位检测装置64位于污水储藏箱61的内部顶端,当水位到达污水储藏箱61最大储水位置时,触发水位传感器64,起到水位检测的作用。或,当水位到达污水储藏箱61最大储水位置时,水的浮力将水位检测装置64的浮力球推起,触发微动开关,起到水位检测的作用。
68.污水储藏箱在位检测装置65由微动开关构成,当污水储藏箱61安装到位时,可触发微动开关,表示污水储藏箱已安装。
69.当拖布清洗完成后,污水回收装置6的污水回收泵66启动工作,将拖地机工作台2上的污水由污水回收管62吸到污水储藏箱61内,污水储藏箱61内的气体从排气孔63排出,保持污水储藏箱61内的气压稳定。当污水储藏箱61内的水位检测装置64检测到水已经到达最大水位时,触发水位报警程序。
70.污水回收装置6可增加排水管接口,直接将污水储藏箱61内的污水由排水管排到下水道。
71.在本发明的一些实施例中,如图5所示,污水回收装置6增加过滤装置67和第二水位检测装置68,过滤装置67安装于污水回收管62的前端或内部,可使用海绵、陶瓷等滤芯材质,污水通过污水回收管62进入过滤装置67后再进入污水储藏箱61。
72.在污水储藏箱61侧边中低位置处增加出水口69,由再利用水泵66b通过水管70连接到拖地机工作台2的喷嘴,可使污水经过过滤沉淀后,再次利用清洗拖布,减少用户加水和倒水的频率。
73.出水口69与可再利用水位等高设置;该可再利用水位,指示:低于该可再利用水位的污水不可再利用,高于该可再利用水位的污水为经过沉淀后可再利用的污水。
74.第二水位检测装置68位于出水口69等高位置,当水位到达污水储藏箱61的出水口69位置时,触发第二水位传感器68,起到表明存在再利用污水的作用。
75.污水储藏箱在位检测装置65由霍尔元件及磁铁组成,磁铁安装在污水储藏箱61,霍尔元件安装在工作站与磁铁对应的位置上,当污水储藏箱安装到位时,可触发霍尔元件,表示污水储藏箱已安装。
76.协同控制中心7负责扫地机器人、拖地机器人的充电、协同控制,以及垃圾回收、拖布清洗控制等,包含显示模块、按键输入模块、运算处理模块、通讯模块和控制模块。
77.协同控制中心7可通过2.4g无线模块、蓝牙模块、或zigbee无线模块等第一无线通信模块给扫地机器人和拖地机器人下发指令,并通过2.4g无线模块、蓝牙模块、或zigbee无线模块等第一无线通信模块接收扫地机器人及拖地机器人返回的状态、清扫数据、清洁数据、地图数据等信息;这些信息传输到运算处理模块,运算处理模块将信息经过处理转换后,将部分状态信息传输到显示模块,显示到显示屏上;而部分信息计算处理后,得出下一步指令信息,再通过2.4g无线模块、蓝牙模块、或zigbee无线模块等第一无线通信模块传输到扫地机器人或拖地机器人,实现协同工作。
78.用户可通过按键输入模块,将控制指令传输到运算处理模块,再通过2.4g无线模块、蓝牙模块、或zigbee无线模块等第一无线通信模块下发到扫地机器人和拖地机器人。
79.协同控制中心7可通过wi-fi通讯模块、4g通讯模块或5g通讯模块等第二无线通信模块实现工作站接入互联网,用户可以通过智能终端app对工作站下发指令,从而控制扫地机器人及拖地机器人;同时,工作站也可以通过wi-fi通讯模块、4g通讯模块或5g通讯模块等第二无线通信模块将工作站、扫地机器人、拖地机器人状态、地图数据等信息传输到后台服务器及智能终端app。
80.按键输入模块可使用显示模块的触摸屏进行替代。
81.协同工作站可增加wlan接口,用户可直接通过网线连接,使工作站接入局域网。
82.电源系统8通过内部线路以及上述的各种外接触点、电极等方式负责整个协同工作站各个模块的供电。
83.在对扫拖机器人协同工作站的协同控制方法做出具体说明之前,本发明实施例先对该协同工作站中相关的工作进程做出以下说明:
84.告警进程a:通过语音播报故障内容、显示屏显示故障内容和/或智能终端app弹窗提示故障内容的方式向用户推送告警信息。
85.扫地机工作台下降进程b:工作台升降装置3的电动伸缩杆收回,电机启动开始工作,带动扫地机工作台1下降,当接近拖地机工作台2上的第二限位装置(接近传感器2)时,拖地机工作台2上的第二限位装置被触发,工作台升降装置3的电机停止,扫地机工作台1停止下降,扫地机器人退出工作站。
86.扫地机工作台上升进程c:工作台升降装置3的电机开始工作,扫地机工作台1上升,当扫地机工作台1的第一限位装置(接近传感器1)被触发时,工作台升降装置3的电机停止,扫地机工作台1停止上升,同时工作台升降装置3的电动伸缩杆伸出,支撑扫地机工作台1。
87.拖地机器人避让进程一d:拖地机器人退出拖地机工作台2,运行到不妨碍扫地机器人出站的位置。
88.扫地机出站进程e:先通过判断拖地机工作台2上的第二限位装置(接近传感器2)是否触发来判断拖地机工作台2上是否有拖地机或其他物体;如拖地机工作台2上的第二限位装置被触发,则再判断拖地机器人是否在充电,如果拖地机器人不在充电,则认为拖地机工作台2上有其他物体妨碍扫地机工作台1下降,触发告警进程a。
89.如果拖地机器人在充电中,执行拖地机器人避让进程一d,继而启动扫地机工作台下降进程b和扫地机工作台上升进程c。
90.扫地机器人回充进程f:先通过判断拖地机工作台2上的第二限位装置(接近传感器2)是否触发来判断拖地机工作台2上是否有拖地机或其他物体;如果拖地机工作台2上的第二限位装置被触发,则再判断拖地机器人是否在充电,如果拖地机器人不在充电,则认为拖地机工作台2上有其他物体妨碍扫地机工作台下降,触发告警进程a;如果拖地机器人在充电中,则控制执行拖地机器人避让进程一d,继而执行扫地机工作台下降进程b,然后扫地机器人通过机身上的红外接收传感器与拖地机工作台2上的红外信号发射装置对位,进入工作站开始充电,当扫地机器人充上电后,执行扫地机工作台上升进程c。
91.拖地机器人回充进程g:首先通过判断拖地机工作台2上的第二限位装置(接近传感器2)是否触发来判断拖地机工作台2上是否有其他物体;如果拖地机工作台2上的第二限位装置被触发,则认为拖地机工作台2上有其他物体妨碍拖地机器人回充,触发告警进程a;如果拖地机工作台2上的第二限位装置没有被触发,则拖扫地机器人通过机身上的红外接收传感器与拖地机工作台2上的红外信号发射装置对位,进入工作站开始充电。
92.拖地机避让进程二h:控制拖地机器人原地待机。
93.拖布打湿进程i:首先通过净水储藏箱在位检测传感器57检测净水储藏箱51是否安装到位,如果没有安装到位,则执行告警进程a,并停止工作;如果净水储藏箱51安装到位,则净水清洗装置的净水泵52开始工作,将水通过水管53从净水储藏箱51抽到拖地机工作台2,再通过喷嘴55将水均匀的喷洒在拖布上。
94.如果喷洒过程中净水储藏箱51的水耗尽,会使净水储藏箱内51的水位传感器56由触发状态转为不触发状态,此时净水泵52停止工作,并执行告警进程a,提醒用户净水储藏箱水量不足。
95.当净水泵52工作时间达到打湿时间时,净水泵52停止工作,喷嘴55不再喷水。
96.拖布清洗进程j:拖地机器人控制其拖布旋转或震动,与拖地机工作台2上的凸起的表面摩擦,使拖布上的灰尘及污水流留下;或者,控制拖地机工作台2上的旋转装置旋转,
或控制拖地机工作台2上的震动装置震动,使拖布上的灰尘及污水流下。
97.污水回收进程k:检测污水储藏箱61是否安装到位,如果没有安装到位,则触发告警进程a,如果安装到位,则污水回收装置6的污水回收泵66开始工作。如果污水储藏箱61的水位检测装置64被触发,则表明污水储藏箱61的水位已达到最高,污水回收装置6的污水回收泵66停止工作,并触发告警进程a。如果污水储藏箱61的水位检测装置64一直没有触发,则判断污水回收装置6的污水回收泵66工作时间是否达到污水回收时间,如果达到,则该污水回收泵66停止工作,完成污水回收工作。
98.垃圾回收进程l:首先通过垃圾回收装置4的在位检测装置48检测垃圾袋43是否安装到位,若没有安装到位,启动告警进程a;若安装到位,启动垃圾回收装置4的风机44,控制其满足风机工作时间time1,实现垃圾的回收。
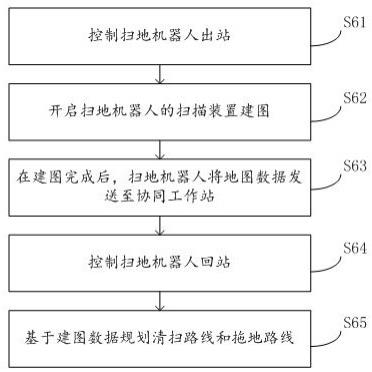
99.如图6所述,本发明基于上述扫拖机器人协同工作站提出的扫拖机器人协同控制方法,由协同工作站的协同控制中心7实施,包括如下步骤:
100.步骤s61:控制扫地机器人出站。
101.在扫拖地机器人协同工作站初次启动或者接收到建图指令后,协同控制中心7首先控制扫地机器人执行扫地机器人出站进程e。
102.步骤s62:开启扫地机器人的扫描装置建图。
103.扫地机器人完成出站后,先运行到随机位置,进而开启扫描装置进行扫描,例如激光雷达,雷达上有发射端和接收端,根据发射和接收的时间差计算光的风行距离可以确定障碍物与雷达之间的距离;扫描期间雷达不断旋转,从而对周围障碍物实现位置的丈量,当雷达扫描建出的图不是完整封闭的地图时,控制扫地机器人再向未扫描到障碍物的其他位置运行并继续建图,直到障碍物完全闭合后结束扫描。
104.这里的扫描建图过程采用现有的地图扫描方式即可,本发明实施例不做具体限定。
105.步骤s63:在建图完成后,扫地机器人将建图数据发送至协同工作站。
106.当通过激光雷达的扫描已经建立出完整地图时,扫地机器人通过2.4g无线通讯模块、蓝牙模块或zigbee无线模块将地图数据等信息上传到协同工作站的协同控制中心7。
107.步骤s64:控制扫地机器人回站。
108.执行扫地机器人回充进程f。
109.扫地机器人完成回充进程f后,执行拖地机器人回充进程g。
110.步骤s65:基于建图数据规划清扫路线和拖地路线。
111.协同控制中心7接收到扫地机器人发送回的地图数据后,规划扫地机器人的清扫路线和拖地机器人的拖地路线。具体的规划方法本发明实施例不做具体限定。
112.协同控制中心7规划好清扫路线和拖地路线后,执行本发明提出的扫拖机器人协同工作控制方法,实现扫地机器人和拖地机器人的协同工作。
113.具体的,如图7a所示,包括如下步骤:
114.步骤s70:接收到任务指令后,控制扫地机器人出站。
115.工作站在接收到用户通过app、遥控器或其他控制终端发送的任务指令后,首先执行扫地机器人出站台的子程序出站。
116.步骤s71:控制扫地机器人按照规划的清扫路线执行清扫任务。
117.扫地机器人出站后,协同控制中心7控制扫地机器人按照规划的清扫路线开始执行清扫任务。
118.这里的任务指令为包括清扫任务和拖地任务的合并指令;基于本发明提出的扫拖机器人协同工作站,用户也可以根据实际需求单独执行清扫任务或拖地任务,这点将在后面的内容展开说明。
119.步骤s72:判断扫地机器人已清扫区域的面积是否达到设定阈值。
120.扫地机器人执行清扫过程中,不断的向协同工作中心7反馈清扫数据,协同工作中心7根据返回的清扫数据,判断清扫完成区域的面积,若没有达到设定阈值,扫地机器人继续按照规划的清扫路线执行清扫,拖地机器人执行拖地机器人避让进程二h。
121.若已清扫面积不满足设定阈值,则继续按照规划的清扫路线执行清扫;若已清扫面积达到设定阈值,则执行步骤s73:控制净水清洗装置启动,将拖地机器人的拖布打湿。
122.该步骤中,执行拖布打湿进程i。
123.在本发明的一些实施例中,对拖地机器人的拖布进行打湿的过程提出一种拖地机器人拖布湿度控制方法,如图8所示,包括如下步骤:
124.当扫地机器人清扫区域的面积达到设定阈值后,协同工作中心7启动净水清洗装置5,为拖地机器人的拖布实施喷水打湿,并对净水泵52工作时间进行计时,当达到打湿时间后,控制净水泵停止工作,结束拖布打湿进程i。
125.步骤s81:确定用户设定的湿度档位。
126.本发明实施例中,用户可根据地面脏污程度通过智能终端app、遥控器或其他控制终端设置拖地机器人的拖布湿度,也即设定湿度档位,当启动净水清洗装置5对拖布实施拖布打湿进程后,视为拖布已经完全打湿,进而协同工作中心7读取用户设定的湿度档位,根据湿度档位对拖布实施湿度控制:根据湿度档位对应的湿度对拖布实施旋转去湿或震动去湿,使得拖布湿度达到用户要求。
127.步骤s82:按照湿度档位设定的时间旋转拖布或震动拖布。
128.如果用户设定的湿度档位为中档,则拖地机器人上的拖布开始旋转或震动与中档湿度对应的时间;或,拖地机工作台2上的旋转装置或震动装置开始旋转或震动与中档湿度对应的时间。
129.同理,用户可设定任意档位,每个湿度档位对应设定有相应的时间;档位越低,旋转或震动时间越长,拖布的湿度越低,档位越高,旋转或震动时间越短,拖布的湿度越高。
130.步骤s83:在湿度档位设定的时间达到时,控制停止旋转或震动拖布。
131.实现拖布达到湿度档位要求的湿度。
132.拖布打湿完成后,协同控制中心7继续协同控制步骤s74:控制拖地机器人出站。
133.拖地机器人的拖布打湿完成后,控制拖地机器人出站。
134.步骤s75:控制拖地机器人基于规划的拖地路线执行拖地任务。
135.拖地机器人出站后,协同控制中心7按照规划的拖地路线控制拖地机器人执行拖地任务,期间接收拖地机器人返回的拖地数据。
136.本发明实施例中,拖地机器人的拖地路线由协同控制中心7统一控制,建图由扫地机器人完成,故拖地机器人本体不需要配置与建图相关的扫描模块等,降低了拖地机器人的设计成本,并且可以降低拖地机器人的高度,使其可以穿过更多的家居底部,实施室内地
面的彻底清洁。
137.在本发明的一些实施例中,当拖地机器人出站执行拖地任务期间,协同控制中心还基于二者返回的清扫数据和拖地数据,执行以下步骤,如图7b所示,以实现进一步的避免二者工作冲突,提高清扫效果。
138.步骤s76:判断扫地机器人和拖地机器人是否存在任务冲突。
139.本发明的实施例中,对存在任务冲突按照以下两种方式判断:
140.1、判断扫地机器人和拖地机器人是否会发生碰撞:协同控制中心7结合扫地数据和拖地数据,判断扫地机器人即将清扫的路线,以及拖地机器人即将清洁的路线,二者在设定时间后的规划路线是否会存在交叉点,也即二者在设定时间后是否会发生碰撞,若会发生碰撞则存在冲突。
141.2、判断拖地机器人将要清洁的区域是否已被扫地机器人清扫:协同控制中心7结合扫地数据和拖地数据,判断拖地机器人即将清洁的区域,是否已经被扫地机器人清扫,若未被清扫则存在冲突。
142.步骤s77:在存在冲突时,控制拖地机器人停止直至冲突解除后启动。
143.若二者存在碰撞可能,则控制拖地机器人执行拖地机器人避让进程二h,待扫地机器人清洁过该交叉点路线后,再启动拖地机器人继续按照其规划路线清洁
144.若拖地机器人即将清洁的区域扫地机器人还未清扫,则控制拖地机器人执行拖地机器人避让进程二h,待扫地机器人清洁过该区域后,再启动拖地机器人按照其规划路径实施清洁。
145.若不存在冲突,则扫地机器人按照清扫路线执行清扫任务,拖地机器人按照拖地路线执行拖地任务,直至二者完成任务。
146.在拖地机器人清洁过程中,本发明提出一种拖地机器人拖布清洗方法,通过协同控制中心7检测拖地机器人的清洗时长,实现对拖地机器人清洗周期的控制,具体的,如图9所示,包括如下步骤:
147.步骤s91:计算上次拖地任务与当前拖地任务的时间间隔。
148.拖地机器人清洁期间,协同工作站获取其上次执行拖地任务的时间记录,计算出与当前工作时间的时间间隔周期t1。
149.步骤s92:通过n5-(t1*系数3)计算拖布清洗时间time2。
150.通过time2=n
5-a3×
t1,计算拖布清洗时间,在当前清洁时间达到time2时,步骤s93:在拖地达到time2时间时,控制拖地机器人回站。
151.执行拖地机器人回充进程g。
152.其中,n5和a3为经验设定值,若当前拖地任务距离上次拖地任务的时间间隔t1较长时,表明用户长时间未清洁地面,则地面上的灰尘会比较多,则time2比较短,拖布需要清洁的及时一些;若当前拖地任务距离上次拖地任务的时间间隔t1较短时,表明用户清洁地面比较及时,则地面上的灰尘较少,time2也就比较长,拖布清洁可以晚一些。
153.t1有限制范围,当用户首次使用拖地任务或间隔周期t1超过设定最大值t
max
时,以设定最大值t
max
进行计算。
154.当拖地机器人本次出站拖地时间达到拖布清洗时间间隔time2时,启动拖地机器人回充进程g。
155.步骤s94:拖地机器人回站之后,对拖布实施清洗。
156.本步骤基于上述提出的扫拖机器人协同工作站架构中的污水回收装置6和净水清洗装置5,提出一种扫拖机器人拖布清洗方法,如图10所示,包括如下步骤:
157.步骤s101:判断污水回收装置中污水储藏箱内的污水水位是否满足再利用水位。
158.首先检测污水储藏箱61是否安装到位,如果安装不到位,则触发告警进程a,如果安装到位,则获取污水储藏箱61内的第二水位检测装置68的检测信号,判断污水储藏箱61内的污水水位是否满足再利用水位。这里的再利用水位,为污水过滤沉淀后,能够再次利用的污水的最低水位。
159.在污水储藏箱内的污水水位满足再利用水位时,步骤s102:启动污水回收装置的再利用水泵。
160.再利用水泵66b通过水管连接的到拖地机工作台2的喷嘴55,第再利用水泵66b启动后,经沉淀后可再利用的污水经喷嘴55喷洒到拖布上。
161.步骤s103:对喷洒时间计时,并在喷洒期间始终检测污水储藏箱内的水位是否满足再利用水位。
162.在喷洒期间,始终获取第二水位检测装置68的检测数据,并对喷洒时间进行计时。
163.步骤s104:在喷洒时间到达设定喷洒时间t1,且始终满足再利用水位时,控制污水回收装置的再利用水泵停止工作。
164.上述,若污水回收装置中污水储藏箱内的污水水位不满足再利用水位,则直接开启净水清洗装置的净水泵设定喷洒时间。
165.步骤s105:清洗拖布设定清洗时间。
166.启动拖地清洗进程j:拖地机器人上的拖布开始旋转或者振动设定清洗时间n1,或启动拖地机工作台2上的旋转装置或震动装置工作设定清洗时间n1,将污水和灰尘挤下拖布。
167.步骤s106:在喷洒时间未达到设定喷洒时间t1已不满足再利用水位时,控制污水回收装置的再利用水泵停止工作,启动净水清洗装置的净水泵。
168.污水回收装置6的再利用水泵66b的工作时间为t2时,t2<t1,根据第二水检测装置68的检测数据判断污水储藏箱61内的水位已经不满足再利用水位时,则控制再利用水泵66b停止工作,也即当污水储藏箱61内的水位已不满足再利用水位时,再利用水泵66b的工作时间还未达到设定清洗时间t1时,使用净水继续打湿拖布。
169.在根据净水清洗装置5的在位传感器57的检测信号判断净水存储箱51安装到位后,启动与净水储藏箱51连接的净水泵52,从净水存储箱51中抽取净水继续清洗拖布。若净水存储箱51没有安装到位,则启动告警进程a。
170.步骤s107:在净水清洗装置的净水泵工作直至达到设定喷洒时间后,控制其停止工作。
171.当净水清洗装置5的净水泵52工作满足t
1-t2时间后,也即总时长达到设定喷洒时间后,拖布已经打湿,控制净水泵52停止工作。
172.步骤s107执行完毕后,转至步骤s105:清洗拖布设定清洗时间,将污水和灰尘挤下拖布。
173.执行拖布清洗进程j设定清洗时间,期间,净水储藏箱51的水位传感器56若停止触
发,则启动告警进程a发出缺水告警。
174.拖地机器人完成拖布清洗后,协同工作站启动污水回收进程k。
175.本发明提出的拖布清洁方式,因为利用过滤、沉淀好的污水进行二次利用,可以节约水资源,同时降低用户加水、倒水的频率。
176.污水回收工作完成后,如果拖地任务还未完成,则控制拖地机器人继续出站按照规划路径继续执行清洁,直至当前任务完成后返回协同工作站。
177.当协同控制中心7到拖地任务完成时,启动拖地机器人回充进程g。当拖地机器人回充成功后,执行拖布打湿进程、拖布清洗进程和污水回收进程。
178.期间,当扫地机器人完成清扫任务后,协同控制中心7启动扫地机器人回充进程f,在扫地机器人回充到位后,基于上述提出的扫地机器人垃圾回收方法确定的风机工作时间time1启动垃圾回收进程l。
179.应该指出的是,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1