一种自动化炒菜机的制作方法
1.本实用新型涉及炒菜机技术领域,具体涉及一种自动化炒菜机。
背景技术:
2.餐饮业的成本尤其是厨师的成本占据了总成本中相当大的比重,从而在一定程度上制约了餐饮业品质和服务的进一步提升和壮大,同时由于厨师的体力劳动强度大,长时间工作后容易患上肩周炎、腰肌劳损等厨师职业病。为此,一款能够缩减人力,降低人工成本,提升出品速度,改善厨师工作环境,节约能源,味道一致的炒菜机可以有效的改善上述问题,炒菜机常用于大众消费的快餐店、餐馆等,能自动炒、煎、烹、炸、爆、焖、蒸、煮、烙、炖、煲等功能,轻松实现了做饭过程的自动化和趣味化。
3.现有的炒菜机,存在如下弊端:1、料盒中的食材通常是人工添加到炒菜锅中;2、搅拌机构的翻转角度无法精确控制,从而无法精确控制搅拌机构与搅拌锅的相对位置关系;3、搅拌锅的加热效率相对较低;4、搅拌锅的散热效率相对较低。以上弊端均会影响炒菜机的工作效率。此外,现有炒菜机的各功能模块的集成性相对较差,导致安装空间大。
技术实现要素:
4.有鉴于此,本实用新型的目的是提供一种自动化炒菜机,以便提高整体结构的紧凑性以及工作效率。
5.本实用新型通过以下技术手段解决上述问题:
6.一种自动化炒菜机,包括机柜、弹性夹紧投料机构和搅拌锅套件,所述弹性夹紧投料机构和搅拌锅套件均设置有机柜上,所述弹性夹紧投料机构包括与机柜固定连接的双轴电机以及与双轴电机的输出轴固定连接的弹性夹持件。
7.进一步,所述弹性夹持件包括第一固定块、第二固定块和双扭簧,所述第一固定块和第二固定块合拢装配后形成与双扭簧匹配的限位腔,所述双扭簧一体延伸出夹爪。
8.进一步,所述搅拌锅套件包括搅拌锅、设置在搅拌锅侧壁的翻转机构以及通过翻转机构带动翻转的搅拌机构,所述翻转机构包括与搅拌锅侧壁固定连接的翻转支座以及设置在翻转支座上的翻转电机,所述搅拌机构连接有支撑臂,所述翻转电机的输出端与支撑臂传动连接,所述翻转支座上设置有翻转角度传感器。
9.进一步,所述搅拌锅的底部设置有感应发热盘,所述感应发热盘包括中心的发热部和边缘的非发热部,所述非发热部与搅拌锅底部之间设置有隔热石棉。
10.进一步,所述搅拌锅的外部设置有锅外罩,所述锅外罩的内底部设置有散热风扇,锅外罩上开设有散热孔。
11.进一步,所述搅拌机构包括搅拌电机、搅拌转动座、搅拌铲组件和侧刮铲组件,所述搅拌电机与搅拌转动座固定连接,搅拌电机的输出端加工成太阳轮,搅拌电机主体与太阳轮对应的位置一体成型齿圈,所述太阳轮与齿圈之间啮合传动有主动行星轮和从动行星轮,所述搅拌转动座内转动装配有行星架,所述从动行星轮与行星架固定连接,所述主动行
星轮固定连接有主动行星轮轴,所述主动行星轮轴穿过行星架后通过万向节与搅拌铲组件传动连接,主动行星轮轴与行星架之间转动装配,所述侧刮铲组件与行星架固定连接;所述支撑臂与搅拌转动座固定连接。
12.进一步,所述行星架的底部固定连接有导向套,所述搅拌铲组件包括固定连接的搅拌铲和搅拌铲连接轴,所述搅拌铲连接轴与导向套转动套接装配。
13.进一步,所述搅拌电机与搅拌转动座的连接处设置有转接板,搅拌电机、转接板和搅拌转动座之间固定连接。
14.本实用新型的有益效果:
15.本技术的自动化炒菜机,包括机柜、弹性夹紧投料机构和搅拌锅套件,所述弹性夹紧投料机构和搅拌锅套件均设置有机柜上,所述弹性夹紧投料机构包括与机柜固定连接的双轴电机以及与双轴电机的输出轴固定连接的弹性夹持件。本技术的自动化炒菜机,一方面,通过弹性夹紧投料机构实现了食材的自动投料,提高了工作效率,另一方面,弹性夹持件采用双轴电机驱动,整体结构紧凑。
附图说明
16.下面结合附图和实施例对本实用新型作进一步描述。
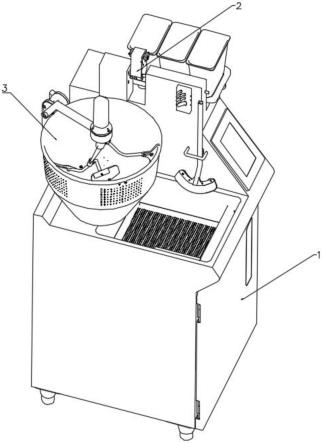
17.图1为本实用新型优选实施例的装配示意图;
18.图2为弹性夹紧投料机构的结构示意图;
19.图3为搅拌锅套件的结构示意图;
20.图4为搅拌锅套件的内部示意图;
21.图5为搅拌机构的爆炸示意图;
22.图6为搅拌机构的剖视图;
23.图7为行星机构啮合传动的横截面剖视图。
具体实施方式
24.下面通过附图和实施例对本实用新型进一步详细说明。通过这些说明,本实用新型的特点和优点将变得更为清楚明确。显然,所描述的实施例仅是本实用新型的一部分实施例,而不是全部的实施例。
25.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
26.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
27.如图1至图7所示,本实施例提供了一种自动化炒菜机,包括机柜1、弹性夹紧投料
机构2和搅拌锅套件3,所述弹性夹紧投料机构和搅拌锅套件均设置有机柜上,所述弹性夹紧投料机构包括与机柜固定连接的双轴电机201以及与双轴电机的输出轴固定连接的弹性夹持件,所述弹性夹持件包括第一固定块202、第二固定块203和双扭簧204,所述第一固定块和第二固定块合拢装配后形成与双扭簧匹配的限位腔205,所述双扭簧与限位腔构成无轴转动副,双扭簧一体延伸出夹爪206。具体应用时,夹爪弹性夹紧料盒,大大提高了夹紧的可靠性,有效减少了夹紧后料盒松动的情况;夹紧后,通过双轴电机带动料盒翻转,即可实现食材的自动投料。
28.本技术的自动化炒菜机,一方面,通过弹性夹紧投料机构实现了食材的自动投料,提高了工作效率,另一方面,弹性夹持件采用双轴电机驱动,整体结构紧凑。
29.所述搅拌锅套件包括搅拌锅305、设置在搅拌锅侧壁的翻转机构以及通过翻转机构带动翻转的搅拌机构304,所述搅拌锅包括球面底部和锥面侧部,所述锥面侧部相对球面底部相切延伸,这样使得搅拌锅在不改变直径的前提下变得更深。
30.所述翻转机构包括与搅拌锅侧壁固定连接的翻转支座302以及设置在翻转支座上的翻转电机301,所述搅拌机构连接有支撑臂303,所述翻转电机的输出端与支撑臂传动连接,所述翻转支座上设置有翻转角度传感器306。翻转角度传感器能将搅拌机构的翻转角度信号反馈给控制单元,再由控制单元控制翻转电机的动作,从而可以精确控制搅拌机构的翻转角度,在搅拌机构伸入或离开搅拌锅内,均能使搅拌机构移动到位。有必要说明的是:具体的控制逻辑和控制电路,均为现有技术,此不再赘述。
31.作为对上述技术方案的进一步改进,所述搅拌锅的底部设置有感应发热盘309,所述感应发热盘包括中心的发热部和边缘的非发热部,所述非发热部与搅拌锅底部之间设置有隔热石棉308。通过设置隔热石棉,一方面,能避免发热部的热量经搅拌锅与感应发热盘之间的间隙流失,有利于提高热效率,另一方面,隔热石棉能保护感应发热盘的非发热部,避免搅拌锅的热量对感应发热盘的非发热部产生不利影响。
32.作为对上述技术方案的进一步改进,所述搅拌锅的外部设置有锅外罩310,所述锅外罩的内底部设置有散热风扇311,锅外罩上开设有散热孔307,所述散热孔设置在锅外罩的上侧部。当炒菜完毕后,通过散热风扇能提高炒菜锅的散热效率。
33.作为对上述技术方案的进一步改进,所述搅拌机构包括搅拌电机3042、搅拌转动座3044、搅拌铲组件和侧刮铲组件,所述搅拌电机的底部与搅拌转动座的顶部固定连接,所述搅拌转动座与支撑臂固定连接,通过支撑臂可以将整个搅拌机构与外界构件连接。优选地,所述搅拌电机与搅拌转动座的连接处设置有转接板3043,搅拌电机、转接板和搅拌转动座之间固定连接;通过布设转接板,能提高搅拌电机与搅拌转动座连接的便利性。进一步优选地,所述搅拌电机的外部套接设置有与保护罩3041,所述保护罩与转接板固定连接;保护罩能对搅拌电机进行保护。
34.所述搅拌电机的输出端加工成太阳轮3045,搅拌电机主体与太阳轮对应的位置一体成型齿圈3046,所述太阳轮与齿圈之间啮合传动有主动行星轮3047和从动行星轮3048,所述搅拌转动座内转动装配有行星架30415,所述从动行星轮与行星架固定连接,所述主动行星轮固定连接有主动行星轮轴30416,所述主动行星轮轴穿过行星架后通过万向节30411与搅拌铲组件传动连接,主动行星轮轴与行星架之间转动装配,所述侧刮铲组件与行星架固定连接,具体地,所述侧刮铲组件包括固定连接的侧刮铲连接轴3049和侧刮铲30410,所
述侧刮铲连接轴与行星架固定连接。优选地,所述搅拌转动座与行星架之间、主动行星轮轴与行星架之间、搅拌铲连接轴与导向套之间分别通过第一轴承、第二轴承和第三轴承转动装配,以便降低转动副的摩擦,提高转动副的平顺性。
35.所述行星架的底部固定连接有导向套30412,所述搅拌铲组件包括固定连接的搅拌铲30414和搅拌铲连接轴30413,所述搅拌铲连接轴与导向套转动套接装配。
36.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1