一种全自动抓斗格栅清污机控制系统的制作方法
1.本发明涉及污水处理技术领域,尤其涉及一种全自动抓斗格栅清污机控制系统。
背景技术:
2.城市污水按来源可分为生活污水、工业废水和径流污水,由城市管渠汇集并应经城市污水处理厂进行处理,污水处理厂利用各种设备和工艺技术把污水中含有的污染物质从水中分离去除,使有害物质转化为无害的物质,使水得到净化。
3.全自动抓斗格栅清污机广泛用于污水处理厂的进水渠、河道取水渠、雨水排放渠等,主要作用是拦截大块垃圾,并予以清理,现有的抓斗格栅清污机虽能实现清污的技术效果,但却不能保障及时准确定位清渣点,采用的时间控制抓斗张合忽视了现场实际情况,会造成液压力过大,损坏液压系统,而且液位控制启动方式也不能及时有效的清理垃圾,加大了维护的成本,降低抓斗格栅机的寿命,存在着不足。
4.综上所述,针对现有技术中存在的缺陷,特别需要一种全自动抓斗格栅清污机控制系统,以解决现有技术的不足。
技术实现要素:
5.本发明的目的是提供一种全自动抓斗格栅清污机控制系统,设计新颖,高效而且安全,智能化的清理垃圾,避免垃圾堆积,实用性能优。
6.本发明为解决其技术问题所采用的技术方案是:
7.一种全自动抓斗格栅清污机控制系统,包括:吊运小车、抓斗、卷扬机、轨道、plc控制器、控制柜,控制柜上安装有人机交互界面, plc控制器的输出端连接人机交互界面;
8.吊运小车以驱动电机为动力沿轨道运行,驱动电机连接plc控制器,吊运小车上开设有感应探头,轨道上开设有感应条,感应探头触发感应条,感应探头将吊动小车的触发信号传送至plc控制器;
9.吊运小车上设置有连接plc控制器的牵引绳松弛感应开关;
10.卷扬机包含有卷扬机电机、齿轮限位开关,卷扬机电机和齿轮限位开关均连接plc控制器,卷扬机电机释放牵引绳和油管带动抓斗上升或下降,抓斗上升或下降到设定位置时触发齿轮限位开关,齿轮限位开关将感应信号传送给plc控制器;
11.抓斗由抓爪组成,抓爪连接液压缸,液压缸的舒张控制抓斗的合闭,液压缸上设置有压力传感器,压力传感器将感应信号传送至 plc控制器。
12.进一步,所述液压缸通过油管连接液压泵电机,油管上设置有电磁阀,液压泵电机和电磁阀均连接plc控制器。
13.进一步,所述人机交互界面采用触摸屏。
14.进一步,所述控制柜的内部分别设置有监控模块、报警模块、扩展模块。
15.进一步,所述plc控制器的型号为西门子s7
‑
1500型。
16.本发明的优点在于:
17.综上所述,本发明设计合理,自动化程度优,通过采用在轨道中设置感应条,在吊运小车上设置感应探头,感应探头感应到感应条触发停车指令,使吊运小车清渣点定位准确,防止抓斗撞击地面,采用在液压系统上安装压力传感器,采用压力控制液压力,避免压力过大而损坏液压系统,实用性能优,高效而且安全,智能化的清理垃圾,避免垃圾的堆积。
附图说明
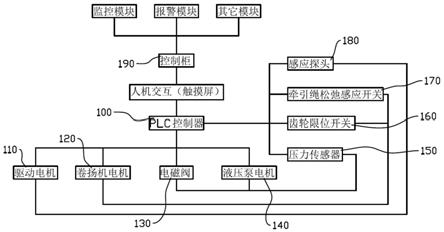
18.图1为本发明的结构框图;
19.100
‑
plc控制器,110
‑
驱动电机,120
‑
卷扬机电机,130
‑
电磁阀,140
‑
液压泵电机,150
‑
压力传感器,160
‑
齿轮限位开关,170
‑ꢀ
牵引绳松弛感应开关,180
‑
感应探头,190
‑
控制柜。
具体实施方式
20.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合图示与具体实施例,进一步阐述本发明。
21.如图1所示,一种全自动抓斗格栅清污机控制系统,包括:吊运小车、抓斗、卷扬机、轨道、plc控制器100、控制柜190,控制柜190上安装有人机交互界面,plc控制器100的输出端连接人机交互界面,吊运小车以驱动电机110为动力沿轨道运行,驱动电机110 连接plc控制器100,吊运小车上开设有感应探头180,轨道上开设有感应条,感应探头180触发感应条,感应探头180将吊动小车的触发信号传送至plc控制器100,吊运小车上设置有连接plc控制器 100的牵引绳松弛感应开关170;卷扬机包含有卷扬机电机120、齿轮限位开关160,卷扬机电机120和齿轮限位开关160均连接plc 控制器100,卷扬机电机120释放牵引绳和油管带动抓斗上升或下降,抓斗上升或下降到设定位置时触发齿轮限位开关160,齿轮限位开关 160将感应信号传送给plc控制器100;抓斗由抓爪组成,抓爪连接液压缸,液压缸的舒张控制抓斗的合闭,液压缸上设置有压力传感器150,压力传感器150将感应信号传送至plc控制器100。液压缸通过油管连接液压泵电机140,油管上设置有电磁阀130,液压泵电机14和电磁阀130均连接plc控制器100。
22.另外,人机交互界面采用触摸屏。控制柜的内部分别设置有监控模块、报警模块、扩展模块。plc控制器的型号为西门子s7
‑
1500 型,触摸屏用于接收操作人员的指令,将接收到的指令传输plc控制器,并显示plc控制器反馈的相应的各种信息,监控模块的输出端与触摸屏相连,监控模块可用来显示控制方式、小车位置、接近开关的状态,负荷电流等信息,在出现紧急情况时,报警模块发出报警。
23.本发明的工作原理为:
24.步骤1:本发明全自动抓斗格栅清污机的运行启动可以是时间控制、液位控制、远程控制和手动控制,收到plc控制器的启动指令后,吊运小车移动控制系统开始工作,驱动电机通电,吊运小车沿轨道运行,轨道中特定的位置安装有感应条,当吊运小车运行到此位置时,触发吊运小车上的感应探头,并将感应信号传送给plc控制器,plc控制器发出停车指令,吊运小车停车,继而启动抓斗移动控制系统。
25.步骤2:抓斗移动控制系统启动,卷扬机电机开启,释放牵引绳和油管,抓斗下降,抓斗在下降的过程中,将垃圾向下推到栅条底部,下降到设定位置时触发齿轮限位开关,并
将感应信号传送给plc 控制器,plc控制器发出停车指令,抓斗停车,启动抓爪开合控制系统。
26.此时,如果因为垃圾太多或障碍物阻止了抓斗到达指定位置,触发吊运小车上的牵引绳松弛感应开关,并将感应信号传送给plc 控制器,plc控制器发出停车指令,吊运小车停车,继而启动抓爪开合控制系统。
27.步骤3:抓爪开合控制系统启动,抓斗由抓爪组成,电磁阀开启,液压泵启动,从液压油箱吸取液压油,并通过油管注入液压缸,液压缸舒张,使抓爪闭合即抓斗合拢,当达到设定压力后,压力传感器将感应信号传送给plc控制器,plc控制器发出停车指令,电磁阀关闭,液压泵关闭,继而启动抓斗移动控制系统。
28.步骤4:抓斗移动控制系统启动,卷扬机开启,收拢牵引绳和油管,携带垃圾的抓斗在牵引绳的作用下上升,上升到设定高度后触发齿轮限位开关,并将感应信号传送给plc控制器,plc控制器发出停车指令,抓斗停车,继而启动吊运小车控制系统。
29.步骤5:吊运小车控制系统启动,驱动电机工作,吊运小车移动到卸渣点,吊运小车上的感应探头感应到导轨中的感应条,并将感应信号传送给plc控制器,plc控制器发出停车指令,吊运小车停止,继而启动抓爪开合控制系统。
30.步骤6:启动抓爪开合控制系统,电磁阀开启,液压泵启动,从液压油箱吸取液压油,并通过油管注入液压缸,液压缸收缩,使抓斗打开,当达到设定压力后,压力传感器将感应信号传送给plc控制器,plc控制器发出停车指令,电磁阀关闭,液压泵关闭,卸渣完成,之后进行下一循环过程,当所有抓污点都被清污处理过以后,吊运车返回并停靠在卸渣点。
31.本发明的优点在于:
32.综上所述,本发明设计合理,自动化程度优,通过采用在轨道中设置感应条,在吊运小车上设置感应探头,感应探头感应到感应条触发停车指令,使吊运小车清渣点定位准确,防止抓斗撞击地面,采用在液压系统上安装压力传感器,采用压力控制液压力,避免压力过大而损坏液压系统,实用性能优,高效而且安全,智能化的清理垃圾,避免垃圾的堆积。
33.以上实施方式只为说明本发明的技术构思及特点,其目的在于让本领域的技术人员了解本发明的内容并加以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所做的等效变化或修饰,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1