高效高精度水下基床清淤方法与流程
1.本发明涉及水下工程施工技术领域,尤其是涉及一种高效高精度水下基床清淤方法。
背景技术:
2.沉管法作为一种在水下修建隧道的施工方法迄今为止已有110年的历史,其主要是将预制好的沉管管节分别浮运至指定区域,然后将其逐个沉放至已疏浚好的基床内。目前对沉管基床进行处理的方法主要有先铺法与后填法两种,其中后填法在沉管施工中存在管节上浮的风险,因此通常用于水深较浅、规模较小的沉管隧道工程。而先铺法具有施工效率高、工后沉降较小等优点,因而适用于外海深水、规模较大的沉管隧道工程。但采用先铺法对基床进行处理前,首先面临的技术难题就是如何有效清除基床内的淤泥。
3.目前国内外针对基床清淤的方法主要有三种,第一种是“耙吸船连续清淤法”,即通过离心式泥泵将挖泥耙头铲松的淤泥吸入泥舱内,以此达到清淤的目的。但这种方法对基床的破坏较大,可能直接损坏已铺设的基床。第二种方法是“抓斗挖泥船清淤法”,即采用抓斗直接对水下淤泥进行抓取,但由于抓斗的闭合性太差、泥水混合物中水含量较高等因素,导致有一定量的淤泥从抓斗内漏出,使得清淤效果不佳。第三种方法是目前广泛采用的方法:“空压机抽泥法”,即利用空压机向气举泵内压入空气,泵管内的气液混合物在管外水压力的作用下, 会沿管道向上快速流动,并带动泵管管口附近的土体随水流排除。这种方法成本较低,且清淤效果较好,但气举泵作业时一般需要吊车进行辅助工作,进而导致清淤效率偏低,且清淤精度难以控制。因此,针对上述问题急需提供一种高效高精度水下基床清淤方法。
4.中国专利文献cn 105696625 a记载了一种沉管隧道碎石基床清淤系统及方法,该方法是在基床铺设好的前提下进行清淤,但是对于铺设之前床底的淤泥清除并不适用,且没有记载如何在自然状态下完成基床清淤工作,使用存在局限,因此需要改进。
技术实现要素:
5.本发明提供了一种高效高精度水下基床清淤方法,实现了成本更低、操作更简单、高效、高精度的目的,解决了现有水下基床清淤成本高、效率低和精度差的问题。
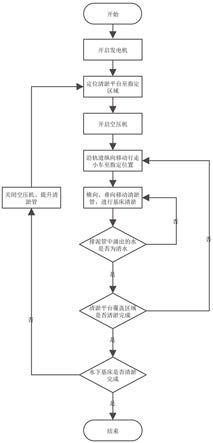
6.为解决上述技术问题,本发明所采用的技术方案是:一种高效高精度水下基床清淤方法,包括以下步骤:s1、驱动浮式平台移动到待清理区域;s2、开启清淤管和排泥管进行工作;s3、s1步骤中待清理区域的清淤工作完成后驱动浮式平台移动到下一个待清理区域;s4、将基床底部的淤泥抽入开底驳内存放;s5、待中转存放的开底驳装满后运输到设计位置进行投放。
7.优选的方案中,所述s1包括以下步骤:a1、在待清理区域外的水域安装多个锚桩,并将浮式平台的四角上的系泊绞车通过钢缆固定在锚桩上;a2、第一操作手登上浮式平台上的第一操作平台区域,开启发电机;a3、第一操作手通过定位系统和第一操作平台上布置的系泊绞车,将浮式平台移动至待清理区域的基床上方;a4、第二操作手登上行走小车上的第二操作平台区域,第一操作手开启第一操作平台上布置的空压机;a5、第一操作手操作纵移绞车,使行走小车沿第一轨道移动至指定清理区域;a6、a五指定区域完成清淤后,浮式平台不动,继续通过第一操作手操作纵移绞车,使行走小车沿第一轨道移动至下一指定清理区域。
8.优选的方案中,所述a5包括以下步骤:b1、第二操作手操作电动葫芦,控制清淤管沿横向和垂向进行清淤工作;b2、在抽出淤泥的过程中,从排泥管中观察涌出水的状态。
9.优选的方案中,所述b2还包括以下步骤:b21、若从排泥管中涌出的水为浑水,则继续按照b一步骤进行清淤;b22、若从排泥管中涌出的水为清水,则此区域清淤完成,关闭清淤管和排泥管。
10.优选的方案中,重复a5
‑
a6并循环,直至浮式平台覆盖的指定清淤区域全部完成清淤工作。
11.优选的方案中,所述s1
‑
s3步骤并循环,直至完成整个水下基床的清淤工作。
12.优选的方案中,所述b22还包括以下步骤:c1、第一操作手关闭空压机并确认状态;c2、第二操作手操作电动葫芦,将清淤管提升至一定高度,然后关闭清淤管。
13.优选的方案中,所述s1之前还包括准备步骤,首先利用定位系统对待清淤区域进行测绘,并做s1
‑
s3循环路径的规划。
14.优选的方案中,所述s3完成后,第一操作手通过定位系统和第一操作平台上布置的系泊绞车并进行坐标参数的校准,将浮式平台移动至下一待清理区域的基床上方,同时微调浮式平台的状态保证浮式平台移动方位的准确。
15.优选的方案中,所述a1还包括在岸边建立固定点位的基站信标。
16.本发明的有益效果为:1、通过定位系统和系泊绞车实现对清淤平台的精确定位。通过带有标尺的轨道,实现对清淤作业的平面位置和高程的精确控制,清淤精度大幅提高。
17.2、通过控制两根或两根以上的清淤管纵向、横向和垂向移动,使得清淤平台一次驻位后清淤范围大、清淤效率显著提高。
18.3、通过设置合理的路径,减少了工作量,使得清淤过程简便化,所需操作人员数量较少,人工成本降低。
附图说明
19.下面结合附图和实施例对本发明作进一步说明:
图1是本发明的流程示意图;图2是本发明的工作时的俯视示意图;图3是本发明的工作时的前视示意图;图4是本发明的工作时的左视示意图;图5是本图3的a处放大示意图。
20.图中:浮式平台1;第一轨道101;行走通道102;第一操作平台103;月池104;纵移绞车2;系泊绞车3;空压机4;发电机5;行走小车6;第二操作平台601;第二轨道602;电动葫芦7;清淤管8;排泥管9;浮筒10;开底驳11;锚桩12;第一操作手13;第二操作手14。
具体实施方式
21.如图1
‑
5中,一种高效高精度水下基床清淤方法,包括以下步骤:s1、驱动浮式平台1移动到待清理区域;s2、开启清淤管8和排泥管9进行工作;s3、s1步骤中待清理区域的清淤工作完成后驱动浮式平台1移动到下一个待清理区域;s4、将基床底部的淤泥抽入开底驳11内存放;s5、待中转存放的开底驳11装满后运输到设计位置进行投放。由此结构,以使得可以通过调整浮式平台1的位置对建造范围内的水域进行清淤工作,在排泥管9上布置多个浮筒10借助浮力可以保证排泥管9的状态稳定,且能观察排泥管9内的排出物状态,通过开底驳11将淤泥运输至其他位置,整体效率高。
22.优选方案中,所述s1包括以下步骤:a1、在待清理区域外的水域安装多个锚桩12,并将浮式平台1的四角上的系泊绞车3通过钢缆固定在锚桩12上;由此结构,以使得可以稳定将浮式平台1按照一定的清理路径进行移动,且移动平稳,系泊绞车3运转速度快,刚性强,能保证浮式平台1在水面承受一定的风浪的侵扰。
23.a2、第一操作手13登上浮式平台1上的第一操作平台103区域,开启发电机5;a3、第一操作手13通过定位系统和第一操作平台103上布置的系泊绞车3,将浮式平台1移动至待清理区域的基床上方;定位系统采用手持rtk
‑
gps定位系统,并采用两次测量取平均值,并记录此坐标值,初次定位时,操作人员可以通过行走通道102进行位置的变换,从而调整接收信号的位置,保证接收信号的稳定,并在多次定位时,采用该定位点作为基准点,后续的定位均以该点作为信号的接收点。
24.a4、第二操作手14登上行走小车6上的第二操作平台601区域,第一操作手13开启第一操作平台103上布置的空压机4;空压机4为清淤头15提供足够的空气从而保证淤泥在压力差作用下进入到清淤管8内。
25.a5、第一操作手13操作纵移绞车2,使行走小车6沿第一轨道101移动至指定清理区域;在浮式平台1的月池104范围内按照设定的路径进行清淤,保证了清淤效果更好。
26.a6、a5指定区域完成清淤后,浮式平台1不动,继续通过第一操作手13操作纵移绞车2,使行走小车6沿第一轨道101移动至下一指定清理区域。
27.由此结构,浮式平台1不动的前提下,以使得首先对浮式平台1所覆盖的范围进行
清淤,保证该区域内的淤泥得到清除,从而提高了整体的清淤效率。
28.优选方案中,所述a5包括以下步骤:b1、第二操作手14操作电动葫芦7,控制清淤管8沿横向与垂向进行清淤工作;b2、在抽出淤泥的过程中,从排泥管9中观察涌出水的状态。由此结构,可以对月池104范围内的区域进行完整的清淤,电动葫芦7在第二轨道602上调整,保证整体受力稳定,可以通过观察排泥管9的状态调整清淤管8的状态。
29.优选方案中,所述b2还包括以下步骤:b21、若从排泥管9中涌出的水为浑水,则继续按照b1步骤进行清淤;b22、若从排泥管9中涌出的水为清水,则此区域清淤完成,关闭清淤管8和排泥管9。由此结构,以使得能够根据排泥管9内泥水的状态快速判断是否需要继续清淤,从而保证了清淤时的方便,同时保证了清淤的效率。
30.优选的方案中,重复a5
‑
a6并循环,直至浮式平台1覆盖的指定清淤区域全部完成清淤工作。由此结构,以使得能有序的完成月池104范围内的清淤工作。
31.优选的方案中,所述s1
‑
s3步骤并循环,直至完成整个水下基床的清淤工作。
32.优选的方案中,所述b22还包括以下步骤:c1、第一操作手13关闭空压机4并确认状态;c2、第二操作手14操作电动葫芦7,将清淤管8提升至一定高度,然后关闭清淤管8。由此结构,以使得当清淤完成后,关闭空压机4后,由于清淤头15内没有也压力差,因此抽泥停止,此时利用电动葫芦7将清淤管8提升更加容易,否则由于清淤管8内存在抽排的泥水会产生扰动,造成整体的失衡。
33.优选的方案中,所述s1之前还包括准备步骤,首先利用定位系统对待清淤区域进行测绘,并做s1
‑
s3循环路径的规划。由此结构,以使得提高了清淤的效率,首先根据数据进行布局和决策,避免了清淤的效率低下或清淤区域的遗漏。
34.优选的方案中,所述s3完成后,第一操作手13通过定位系统和第一操作平台103上布置的系泊绞车3并进行坐标参数的校准,将浮式平台1移动至下一待清理区域的基床上方,同时微调浮式平台1的状态保证浮式平台1移动方位的准确。由此结构,以使得浮式平台1每次移动固定后的距离差在误差范围内,保证了清淤的完全覆盖,且避免了由于已清淤区域重合过大,导致清淤时间长,效率低下。
35.优选的方案中,所述a1还包括在岸边建立固定点位的基站信标。由此结构,以使得能获取稳定的坐标值,保证了浮式平台1移动的精准,在清淤的过程中,保证坐标值和理论数据的差值在10cm内,从而高精度高效完成清淤。
36.工作原理:出厂安装基床清淤装置,清淤装置包括浮式平台1、纵移绞车2、电动葫芦7、空压机4、发电机5、系泊绞车3、行走小车6、清淤管8、排泥管9和浮筒10。浮式平台1为钢管焊接而成,作为搭载全套清淤设备的水上清淤平台,浮式平台1上设有第一轨道101、行走通道102和操作平台103,第一轨道101固定于纵向钢管上部,行走通,102焊接在纵向钢管侧面,可使操作人员沿浮式平台纵向行走,操作平台103布置在浮式平台1端部与行走小车6上,用于操作纵移绞车2、空压机4、发电机5、系泊绞车3和电动葫芦7。纵移绞车2、空压机4、发电机5和系泊绞车3均设置在操作平台103上,纵移绞车2能够牵引行走小车6沿第一轨道101纵向移
动,空压机4能够给清淤管8提供高压气体,发电机5为整套清淤设备提供电力,系泊绞车3起到定位和固定清淤平台的作用,电动葫芦7装于行走小车6顶部的第二轨道602上,可沿第二轨道602来回横向移动,清淤管8为钢管,通过钢丝绳和吊耳悬挂于电动葫芦7下方,清淤管8可以沿第二轨道602的轴线方向在行走小车6上移动,清淤管8上设有驱动装置,驱动装置和行走小车6滑动连接,排泥管9采用橡胶加工而成,排泥管9一端通过法兰盘与清淤管8的出水口相连接,另一端放置于开底驳11中,用于存放排出的淤泥,浮筒10通过螺栓固定于排泥管9上,使排泥管9能够浮于水面之上。清淤管8底部可拆卸的连接有清淤头15,清淤头15采用联排结构,清淤头15的工作原理是空压机产生的压缩空气通过空气接头进入集气腔1501,气体经集气腔1501分配进入各空气支管1502,再由空气支管1502进入相应的吸泥支管1503,进入的大量气体使吸泥支管内液柱密度降低,压力降低,吸泥支管1503内外产生压力差,从而使水携带淤泥进入吸泥支管1503。泥水经汇集腔汇集后进入清淤管8,最后输送至排泥管道。
37.上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1