一种铺排船六点桁架式吸砂起重装置及使用方法与流程
本发明涉及铺排船六点桁架式吸砂起重装置及使用方法。
背景技术:
1、铺排船是一种用于船道治理和沿海护底工程的一种工程船舶,它能够将驳船运输过来的混凝土连锁块、砂浆通过铺排船上设置的起重装置、吸砂充灌装置进行吊装、吸排砂浆输送至铺设的排布、砂袋、砂肋条上,并将其输送到海床面。
2、现有铺排船连锁块吊装完全依赖人工经验进行操作:通过2名操作工操作船艏、船艉两台全回转吊机进行混凝土连锁块吊装,起吊位置、安放位置以及吊装过程需操作人员弱眼远距离观察及现场所配置的多名工人通过高频等通讯工具进行远程指挥吊装,人员成本相对较高、效率与安全性较低。施工时,两台吊机只能吊装2片连锁块,从连锁块起吊-到达吊装位置-回至起吊位置单周循环时间需6min(分钟),在吊装过程中还需注意两台吊机吊臂位置防止其碰撞,吊装过程中吊物晃动较大,人为无法精准判断下放的预设位置,吊机操作人员需通过现场指挥人员指挥不时调整吊机吊臂、回转装置保证连锁块安放位置精准,相对吊装效率及安全系数较低,对操作人员与指挥人员的操作熟练度及配合度要较高。
3、吸砂充灌需要通过人工操作不同设备完成,需先将吸砂泵电机、电缆、吸砂泵与船端输送管道、配电箱进行连接,然后将吸砂泵吊装至驳船船舱内,施工前准备流程繁琐、人工成本高、施工效率低下,启动时操作人员也无法直接观察到泵运转的实际情况,相对安全值较低;整个施工周期内需6-7工人持续操作冲水喷头对驳船舱内进行扫射,同时实时调整泥浆泵位置,以达到泥浆泵所需吸入的浓度要求,人工需求量大,从而导致人工成本增加,并且操作工需有一定的工作经验,整个操作过程中操作人员精神必需高度集中,防止砂浆浓度过高、泥浆泵倾覆而导致生产性事故。
4、铺排船现有施工工艺导致需要大量人工轮班操控,受操作人员个体化差异影响,存在情绪化、易疲劳、水平参差不齐,施工安全和效率因人而异等问题,诸多关键参数决策过度依赖人工经验,未能有效利用施工积累的海量数据为优化施工提供数据支撑。
5、因此针对以上问题提出一种铺排船六点桁架式吸砂起重装置及使用方法。
技术实现思路
1、本发明的目的在于克服现有的缺陷而提供的铺排船六点桁架式吸砂起重装置及使用方法,最大限度降低操作人员的劳动强度与人工成本,能够有效的提高施工过程的中精度控制、安全性能与施工效率。
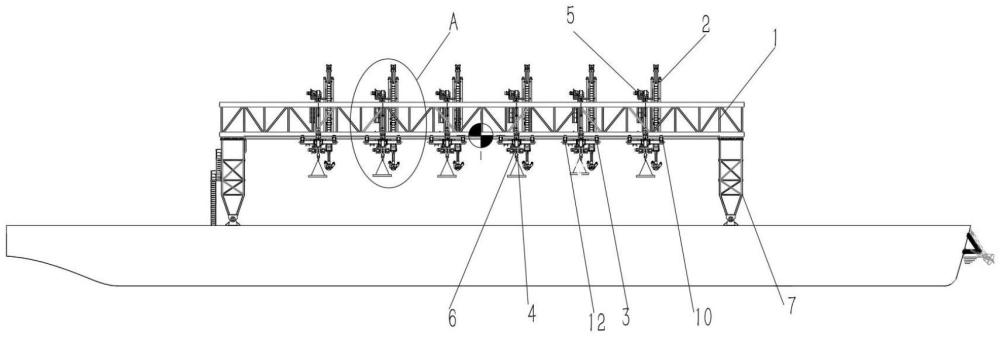
2、实现上述目的的技术方案是:一种铺排船六点桁架式吸砂起重装置,包括支架组件和六组工作组件;六组所述工作组件都滑动连接在所述支架组件上;
3、所述工作组件包括移动组件、吸砂组件和起重组件;所述吸砂组件和起重组件都连接在所述移动组件上,通过所述移动组件移动工作。
4、优选的,所述支架组件包括两根主梁,每根所述主梁的两端各连接一根主框架支腿,每根主框架支腿上安装有摄像头,每左右两根所述主框架支腿之间连接两根辅助梁;所述移动组件滑动连接在两根所述主梁上;所述辅助梁上连接有液压泵站、变频柜和司机室。
5、优选的,所述移动组件包括纵向行走梁和两组纵向行走机构,所述纵向行走梁的两端各连接一组所述纵向行走机构,两组所述纵向行走机构分别滑动连接在两根所述主梁上;所述纵向行走梁上滑动连接有横向行走机构,所述横向行走机构上连接有所述起重组件;所述纵向行走梁的两端各连接有一组延伸组件。
6、优选的,所述延伸组件包括折臂,所述折臂的一端转动连接所述纵向行走梁,所述折臂的另一端上端面连接绳体,所述绳体的另一端连接折臂绞车,所述折臂绞车设置在所述主梁上;所述折臂的前端设置有限位开关和摄像头。
7、优选的,所述起重组件包括起升机构,所述起升机构连接在所述横向行走机构上;所述起升机构上设置有编码器和重量传感器。
8、优选的,所述吸砂组件连接在所述纵向行走梁的一端的侧壁上;所述吸砂组件包括机械臂,所述机械臂的一端转动连接在所述纵向行走梁上,所述机械臂靠近所述纵向行走梁的一端连接有主臂油缸,所述机械臂中部连接有辅臂油缸,所述机械臂的另一端连接有冲水喷头油缸和吸砂泵,所述冲水喷头油缸上连接有冲水喷头;所述吸砂泵连接有泥水管;所述机械臂上连接有多个角度传感器;所述吸砂泵出口管路上连接有排压传感器。
9、优选的,所述司机室内分别设置有作业控制台、视频监控显示器、数据采集报警与控制系统显示器、纵向行走机构无级调速控制手柄、起升机构与横向行走机构无级调速控制手柄、行走机构单动/联动选择开关、机械臂控制手柄、折臂控制旋钮、吸砂泵冲水泵启动调速旋钮和冲水喷头控制手柄。
10、一种铺排船六点桁架式吸砂起重装置的使用方法,包括以下步骤;
11、混凝土连锁片起重吊装:
12、步骤一;装有混凝土连锁片的运输船靠至铺排船左舷;
13、步骤二;操作人员通过折臂控制旋钮将两侧折臂放平,在下放过程中通过限位开关的信号反馈至数据采集报警与控制系统显示器上显示报警及状态,并通过控制系统采取自动停止保护;
14、步骤三;操作人员操作纵向行走机构无级调速控制手柄可同时对台纵向行走梁和横向行走机构进行控制,将横向行走机构移动至运输船混凝土连锁片正上方;运动过程中的行程、速度及实时位置通过编码器进行采集,通过控制系统计算后反馈至数据采集报警与控制系统显示器,操作人员可实时观察其运行状态、速度及位置信息,当纵向行走梁和横向行走机构接近其规定动作行程时,控制系统通过编码器与限位开关进行预减速与停止保护;
15、步骤四;当起升机构达到运输船上目标混凝土连锁片位置上方后,通过纵向行走机构无级调速控制手柄对起升机构进行操作,操作人员通过观察数据采集报警与控制系统显示器所采集编码器高度信息将吊钩下放至合理高度,各机构到位后操作人员通过数据采集报警与控制系统显示器界面操作对当前纵向行走梁、横向行走机构和起升机构行程、高度进行一键记录保存;
16、步骤五;当起升机构上的吊钩到达目标高度后,由现场工人将混凝土连锁片吊环挂至吊钩上,操作人员可通过摄像头所采集到的现场实时画面传输至数据采集报警与控制系统显示器进行观察,保证人员全部撤离后方可进行下步操作;
17、步骤六;在混凝土连锁片挂钩同时,操作人员可根据实际排布的尺寸大小及需安放的混凝土连锁片数量通过数据采集报警与控制系统显示器进行设置,系统根据输入参数自动排例并显示出混凝土连锁片所需运送至本船已铺设的排布上方的目标位置;
18、步骤七;操作人员通过纵向行走机构无级调速控制手柄将重物吊至一定高度,当混凝土连锁片离地后,重量传感器所测得的数据传输至数据采集报警与控制系统显示器供操作人员观察,控制系统根据设计要求及重量传感器所反馈的数据来判断横向行走机构所能行走的最高速度并进行限制,防止速度过快引起设备故障及安全事故;
19、步骤八;当混凝土连锁片吊至一定高度后,操作人员可通过两种方式实现将混凝土连锁片吊装至目标位置:
20、一、操作人员通过行走机构单动/联动选择开关进行选择,选择联动时可通过操纵纵向行走机构无级调速控制手柄和起升机构与横向行走机构无级调速控制手柄对纵向行走梁、横向行走机构和起升机构进行同时控制,操作人员通过观察各编码器采集的实时位置、速度反馈至数据采集报警与控制系统显示器以及摄像头所监控的现场情况传输至视频监控显示器观察混凝土连锁片实时位置,直至下放至所设定的目标位置;混凝土连锁片吊至目标位置后,现场工人将其脱钩,操作人员通过视频监控显示器确定是否已脱钩,工人撤离至安全位置后,操作人员按原操作流程反向将纵向行走梁、横向行走机构和起升机构移至驳船目标物起吊位置,在操作过程中,因操作人员的不安全行为或失误导至混泥土连锁片未按目标路径及位置移动或设备发生故障时,数据采集报警与控制系统显示器会通过变频柜、各编码器及各限位开关所反馈的数据或信号进行报警显示与保护,防止安全事故发生;
21、二、操作人员通过数据采集报警与控制系统显示器选择自动模式,点击启动自动吊装,控制系统会根据步骤六所设定的目标位置,通过各传感器的反馈信息自动控制纵向行走梁、横向行走机构和起升机构,将混凝土连锁片吊装至目标位置,至目标位置后,现场工人将其脱钩;脱钩完成并且工人撤至安全点后,操作人员再通过界面点击一键返回按钮,控制系统根据步骤四所记录的起吊位置及高度自动将各机构返回至起吊位置,进行下一轮吊装;
22、打砂作业:
23、步骤一,通过数据采集报警与控制系统显示器界面启动液压泵站液压泵,液压泵站具有液位低、油温高、油压测量传感器,并将信号反馈至数据采集报警与控制系统显示器界面上显数据及报警,并由控制系统进行保护;
24、步骤二,操作机械臂控制手柄控制多台机械臂上面的主臂油缸与辅臂油缸将吸砂泵下放至运输船舱内的砂面,角度传感器所测量的实时角度反馈至数据采集报警与控制系统显示器界面显示,控制系统根据机械臂设计要求对最大、最小角度进行报警及保护,可防止因人为操作失误使角度过大或过小对设备造成损坏;
25、步骤三,通过吸砂泵冲水泵启动调速旋钮启动冲水泵,并调节至所需流量与排压,水从冲水喷头喷射出后对砂面进行冲刷,通过操纵冲水喷头控制手柄调节冲水喷头油缸,使冲水喷头向所需目标位置进行喷射,并将砂面冲出一个砂浆坑;
26、步骤四,操纵机械臂控制手柄调节主臂油缸与辅臂油缸将吸砂泵吸口下放至砂浆坑内;
27、步骤五,调节吸砂泵冲水泵启动调速旋钮并调到所需转速,吸砂泵根据旋钮所设定的速度运行;
28、步骤六,所吸的砂浆通过泥管排至已铺设在甲板的砂袋或砂肋条内,吸砂过程中,操作人员可通过排压传感器所反馈至数据采集报警与控制系统显示器界面数据进行观察,通过排压显示值可判断吸砂泵是否处于吸空或闷泵,在吸砂过程中,可调节冲水泵启动调速旋钮控制冲水泵的输出流量,使砂浆保持在一定浓度,并调节冲水喷头喷射位置将周围的砂冲刷至吸砂泵吸口处;
29、步骤七,吸砂结速后按上述流程相反操作将机械臂收回至原始位置,完成打砂作业。
30、本发明的有益效果是:本铺排船六点桁架式吸砂起重装置,将起重吊装与吸砂充灌二种不同施工工艺所需的设备硬件集成于六点桁架式吸砂起重装置,并与一种能够实时测量并显示的集中监测、报警、视觉采集及自动控制系统相结合。可以帮助操作人员实时了解并精确掌握连锁块吊装、吸砂充灌施工时各设备的位置信息、姿态、运行状况及施工所需数据,提供设备运行时的报警及保护功能,满足操作人员可通过数据监控及自动控制系统同时控制多台设备进行作业,最大限度降低操作人员的劳动强度与人工成本,能够有效的提高施工过程的中精度控制、安全性能与施工效率。
- 还没有人留言评论。精彩留言会获得点赞!