一种含有双滑轨复合支链的并联机构的制作方法
[0001]
本发明属于并联机构技术领域,特别是涉及一种含有双滑轨复合支链的并联机构。
背景技术:
[0002]
并联机构采用多支链并联控制动平台执行机构,相对于串联机构具有结构相对紧凑、灵巧度高、动态特性好的优点,可应用于机床、机器人、航空航天器、光通讯系统等众多领域,是近年来研究的热点。
[0003]
六自由度并联机构在机床中应用已经较为广泛,但其具有奇异性强、支链间容易产生干涉的缺点,在多数实际加工场景下,五自由度机构已能满足工作需求,并且相对六自由度并联机构结构更为简单、传动更加高效、控制更加方便,因此具有重要研究价值与广泛的应用前景。
技术实现要素:
[0004]
为了解决上述问题,本发明目的在于提供一种含有双滑轨复合支链的并联机构。
[0005]
为了达到上述目的,本发明提供的含有双滑轨复合支链的并联机构包括基座、动平台、第一支链、第二支链、第三支链和复合支链;
[0006]
所述基座包括第一虎克铰支座、第二虎克铰支座、第三虎克铰支座、双滑轨和基座板;其中第一虎克铰支座与第三虎克铰支座对称固定在基座板的表面左右两侧;第二虎克铰支座固定在基座板的表面前端中部;双滑轨的下端固定在基座板的表面后端中部,前端面上设有相互平行且滑动方向与基座板表面垂直的第一滑轨与第二滑轨;
[0007]
所述动平台包括第一球铰支座、第二球铰支座、第三球铰支座、第四虎克铰支座和台板;其中第一球铰支座与第三球铰支座对称设置在台板的底面左右两侧;第二球铰支座与第四虎克铰支座分别设置在台板的底面前后端中部,并且第四虎克铰支座的转动轴线沿前后方向水平延伸;
[0008]
所述第一支链包括第一伸缩杆、第一虎克铰与第一球铰;其中第一伸缩杆的一端通过第一虎克铰连接在基座的第一虎克铰支座上,另一端通过第一球铰连接在动平台的第一球铰支座上;
[0009]
所述第二支链包括第二伸缩杆、第二虎克铰与第二球铰;其中第二伸缩杆的一端通过第二虎克铰连接在基座的第二虎克铰支座上,另一端通过第二球铰连接在动平台的第二球铰支座上;
[0010]
所述第三支链与第一支链的结构相同,包括第一伸缩杆、第一虎克铰与第一球铰;其中第一伸缩杆的一端通过第一虎克铰连接在基座的第三虎克铰支座上,另一端通过第一球铰连接在动平台的第三球铰支座上;
[0011]
所述复合支链包括第一连杆、第二连杆、第一滑块、第二滑块、复合虎克铰、第三球铰和第四球铰;其中第一滑块以移动的方式连接在基座的第一滑轨上;第二滑块以移动的
方式连接在基座的第二滑轨上;第一连杆的一端通过第三球铰连接在第一滑块上,另一端通过复合虎克铰连接在动平台的第四虎克铰支座上;第二连杆的一端通过第四球铰连接在第二滑块上,另一端通过复合虎克铰连接在动平台的第四虎克铰支座上,并且第一连杆与第二连杆的转动轴线共线。
[0012]
所述基座与动平台均为板状结构,中部带有减重孔。
[0013]
所述第一连杆和第二连杆均为板状杆。
[0014]
本发明提供的含有双滑轨复合支链的并联机构具有以下优点:
[0015]
1、采用双滑轨能够增加机构移动的工作空间,提高运行灵活度,有利于提升运动性能,保障机构的位置精度。
[0016]
2、采用复合支链的构型方式,能够减少机构的支链数,降低机构运行时支链间的干涉。
[0017]
3、采用三条相同支链的连接方式,降低了制造维护成本,有利于节约资源。
附图说明
[0018]
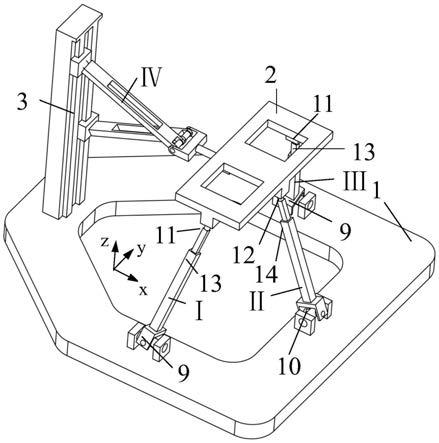
图1为本发明提供的含有双滑轨复合支链的并联机构整体结构示意图。
[0019]
图2为本发明提供的含有双滑轨复合支链的并联机构中复合支链示意图。
[0020]
图3为本发明提供的含有双滑轨复合支链的并联机构中基座示意图。
[0021]
图4为本发明提供的含有双滑轨复合支链的并联机构中动平台示意图。
[0022]
图中:1、基座;101、第一虎克铰支座;102、第二虎克铰支座;103、第三虎克铰支座;104、基座板;2、动平台;201、第一球铰支座;202、第二球铰支座;203、第三球铰支座;204、第四虎克铰支座;205、台板;3、双滑轨;301、第一滑轨;302、第二滑轨;4、第一连杆;5、第二连杆;6、复合虎克铰;7、第一滑块;8、第二滑块;9、第一虎克铰;10、第二虎克铰;11、第一球铰;12、第二球铰;13、第一伸缩杆;14、第二伸缩杆;15、第三球铰;16、第四球铰。
具体实施方式
[0023]
下面结合附图对本发明提供的含有双滑轨复合支链的并联机构进行详细说明。
[0024]
如图1-图4所示,本发明提供的含有双滑轨复合支链的并联机构包括基座1、动平台2、第一支链ⅰ、第二支链ⅱ、第三支链ⅲ和复合支链ⅳ;
[0025]
所述基座1包括第一虎克铰支座101、第二虎克铰支座102、第三虎克铰支座103、双滑轨3和基座板104;其中第一虎克铰支座101与第三虎克铰支座103对称固定在基座板104的表面左右两侧;第二虎克铰支座102固定在基座板104的表面前端中部;双滑轨3的下端固定在基座板104的表面后端中部,前端面上设有相互平行且滑动方向与基座板104表面垂直的第一滑轨301与第二滑轨302;
[0026]
所述动平台2包括第一球铰支座201、第二球铰支座202、第三球铰支座203、第四虎克铰支座204和台板205;其中第一球铰支座201与第三球铰支座203对称设置在台板205的底面左右两侧;第二球铰支座202与第四虎克铰支座204分别设置在台板205的底面前后端中部,并且第四虎克铰支座204的转动轴线沿前后方向水平延伸;
[0027]
所述第一支链ⅰ包括第一伸缩杆13、第一虎克铰9与第一球铰11;其中第一伸缩杆13的一端通过第一虎克铰9连接在基座1的第一虎克铰支座101上,另一端通过第一球铰11
连接在动平台2的第一球铰支座201上;
[0028]
所述第二支链ⅱ包括第二伸缩杆14、第二虎克铰10与第二球铰12;其中第二伸缩杆14的一端通过第二虎克铰10连接在基座1的第二虎克铰支座102上,另一端通过第二球铰12连接在动平台2的第二球铰支座202上;
[0029]
所述第三支链ⅲ与第一支链ⅰ的结构相同,包括第一伸缩杆13、第一虎克铰9与第一球铰11;其中第一伸缩杆13的一端通过第一虎克铰9连接在基座1的第三虎克铰支座103上,另一端通过第一球铰11连接在动平台2的第三球铰支座203上;
[0030]
所述复合支链ⅳ包括第一连杆4、第二连杆5、第一滑块7、第二滑块8、复合虎克铰6、第三球铰15和第四球铰16;其中第一滑块7以移动的方式连接在基座1的第一滑轨301上;第二滑块8以移动的方式连接在基座1的第二滑轨302上;第一连杆4的一端通过第三球铰15连接在第一滑块7上,另一端通过复合虎克铰6连接在动平台2的第四虎克铰支座204上;第二连杆5的一端通过第四球铰16连接在第二滑块8上,另一端通过复合虎克铰6连接在动平台2的第四虎克铰支座204上,并且第一连杆4与第二连杆5的转动轴线共线。
[0031]
所述基座1与动平台2均为板状结构,中部带有减重孔。
[0032]
所述第一连杆4和第二连杆5均为板状杆。
[0033]
现以基座1的前后方向作为x轴方向,左右方向作为y轴方向,垂直方向作为z轴方向,对本发明提供的一种含有双滑轨复合支链的并联机构的工作原理阐述如下:
[0034]
本含有双滑轨复合支链的并联机构选取第一支链ⅰ、第二支链ⅱ、第三支链ⅲ的伸缩杆与复合支链ⅳ的轨道、滑块用为主动副,可实现动平台2三转动两移动共五个自由度的控制。第一滑块7与第二滑块8分别在第一滑轨301与第二滑轨302上同时上下移动并配合其他支链可实现动平台2在z轴方向上的移动自由度;第一滑块7与第二滑块8分别在第一滑轨301与第二滑轨302上反方向运动并配合其他支链可实现动平台2在x轴方向上的移动自由度;第一支链ⅰ与第三支链ⅲ上第一伸缩杆11的不等距伸缩运动可实现动平台2在x轴方向上的转动自由度;复合虎克铰6可使动平台2一侧始终与第一连杆4、第二连杆5的转动轴线平行,仅在连杆与滑块连接的第三球铰15与第四球绞16绕z轴转动时,连杆的转动轴线能具有绕z轴的转动运动,使动平台2获得绕z轴的转动自由度,同时提供了y轴方向的移动约束;第二支链ⅱ上第二伸缩杆14的伸缩运动可提供动平台2在y轴方向上转动自由度,最终,动平台2具有三转动两平动共五个自由度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1