爪夹装置及其待抓物的抓取方法与流程
1.本发明有关于一种爪夹装置,尤指一种搭配气囊的爪夹装置。
背景技术:
2.在自动化流程中,一般来说,机械手臂是透过爪夹的收放来抓取现场的料件。
3.然而,不同料件的外观形状与重量可能相当不同,需要因应不同料件外型而重新设计爪夹以便合适地抓取对应料件。如此频繁重新设计的作法,无疑增加了资源、时间与人力成本,也大幅度降低现场的工作效率。
技术实现要素:
4.本发明的主要目的,在于提供一种爪夹装置及待抓物的抓取方法,用以解决以上先前技术所提到的困难。
5.本发明的一实施例为提供一种爪夹装置。爪夹装置包括一支架、至少一第一夹爪、至少一第二夹爪、至少一第一伸缩模块、至少一第二伸缩模块与一气囊。第一伸缩模块位于支架的一侧,可伸缩地连接第一夹爪。第二伸缩模块位于支架的另侧,可伸缩地连接第二夹爪。气囊用以与第一夹爪、第二夹爪协同抓取一待抓物。
6.依据本发明一或多个实施例,在上述的爪夹装置中,第一伸缩模块包含二第一伸缩器。这些第一伸缩器间隔地位于支架的所述侧,分别可伸缩地连接第一夹爪,且每个第一伸缩器枢接第一夹爪。
7.依据本发明一或多个实施例,在上述的爪夹装置中,第二伸缩模块包含二第二伸缩器。这些第二伸缩器间隔地位于支架的所述另侧,分别可伸缩地连接第二夹爪,且每个第二伸缩器枢接第二夹爪。
8.依据本发明一或多个实施例,在上述的爪夹装置中,支架具有一延伸方向,第一伸缩模块沿一第一伸缩方向带动第一夹爪,第二伸缩模块沿一第二伸缩方向带动第二夹爪。气囊位于该第一夹爪与该第二夹爪之间,第一伸缩方向与第二伸缩方向同轴,且正交支架的延伸方向。
9.依据本发明一或多个实施例,在上述的爪夹装置中,支架具有一延伸方向,第一伸缩模块沿一第一伸缩方向带动第一夹爪,第二伸缩模块沿一第二伸缩方向带动第二夹爪。第一伸缩方向、第二伸缩方向与延伸方向彼此相交,第一伸缩方向与延伸方向的最小夹角与第二伸缩方向与延伸方向的最小夹角皆为锐角,气囊连接支架,不位于第一夹爪与第二夹爪之间的空间内。
10.依据本发明一或多个实施例,在上述的爪夹装置中,第一伸缩模块与第一夹爪分别为二个,第一伸缩模块分别位于支架的二相对端,以及位于支架的二相对侧。每个第一伸缩模块沿一第一伸缩方向带动对应的第一夹爪。第二伸缩模块与第二夹爪分别为二个,第二伸缩模块分别位于支架的此相对端,以及位于支架的此相对侧。每个第二伸缩模块沿一第二伸缩方向带动对应的第二夹爪。气囊连接支架,位于这些第一夹爪与这些第二夹爪所
定义的范围内。
11.依据本发明一或多个实施例,在上述的爪夹装置中,气囊连接支架,且气囊的充气嘴位于支架内。
12.依据本发明一或多个实施例,上述爪夹装置更包含一延伸柱及一第一滑块。第一滑块固接支架,且可滑移地位于延伸柱上,用以沿延伸柱的一长轴方向滑移。
13.依据本发明一或多个实施例,上述爪夹装置更包含一工作模块以及一第二滑块。第二滑块固接工作模块,且可滑移地位于延伸柱上,用以沿延伸柱的长轴方向滑移。举例来说,工作模块为一爪夹、一气囊、一充气装置或一气压传感器。
14.依据本发明一或多个实施例,上述爪夹装置更包含一动力装置及一控制器。动力装置用以独立控制每个第一伸缩器及第二伸缩器,分别操作第一夹爪与第二夹爪的收放。控制器电连接动力装置,用以控制动力装置的输出动力,以分别操作第一夹爪与第二夹爪的收放,而提供多个抓取姿态其中之一。
15.依据本发明一或多个实施例,上述爪夹装置更包含一充气装置。充气装置连接气囊,且电连接控制器,以对气囊充气并压迫待抓物。控制器控制充气装置对气囊充气的气压。
16.依据本发明一或多个实施例,上述爪夹装置更包含一气压传感器。气压传感器位于气囊内部,或是,位于气囊的一充气嘴内,用以感测气囊目前所回馈的气压数据。故,当控制器判断出所回馈的气压数据已达一特定值时,控制器驱动动力装置以使第一夹爪与第二夹爪抓取所述待抓物。
17.本发明的一实施例为提供一种待抓物的抓取方法。此抓取方法包含多数个步骤如下。展开一爪夹装置的二夹爪;对这些夹爪之间的一气囊进行充气;以及当所述气囊触压一待抓物,控制这些夹爪收合以抓取所述待抓物。
18.如此,透过以上各实施例的所述架构,本发明爪夹装置能够配合现场操作者的判断,快速地改变爪夹模块的型态,保持抓取对象的稳定度,以利提升自动化流程整体的时间效率。
19.以上所述仅用以阐述本发明所欲解决的问题、解决问题的技术手段、及其产生的功效等等,本发明的具体细节将在下文的实施方式及相关图式中详细介绍。
附图说明
20.为让本发明的上述和其他目的、特征、优点与实施例能更明显易懂,所附图式的说明如下:
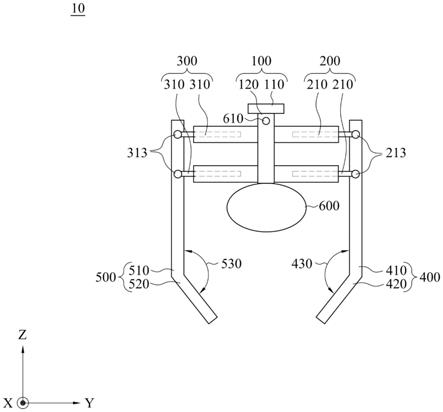
21.图1为本发明一实施方式的爪夹装置的示意图;
22.图2a为图1的爪夹装置的侧视图;
23.图2b为图1的爪夹装置的上视图;
24.图3为图1的爪夹装置的方块图;
25.图4a至图4c分别为图1的爪夹装置于不同抓取姿态的操作示意图;
26.图5a为本发明一实施方式的爪夹装置的示意图;
27.图5b为图5a的爪夹装置的侧视图;
28.图6a为图5a的爪夹装置的操作示意图;
29.图6b为图6a的爪夹装置的侧视图;
30.图7a为本发明一实施方式的爪夹装置的上视图;
31.图7b为本发明一实施方式的爪夹装置的上视图;
32.图8为本发明一实施方式的爪夹装置的上视图;
33.以及图9为本发明一实施方式的待抓物的抓取方法的流程图。
34.其中附图标记为:
35.10、11、12、13、14:爪夹装置
36.100:支架
37.100a:一端
38.100b:另端
39.100e:延伸方向
40.110:本体
41.120:管体
42.130:延伸柱
43.131:延伸方向
44.140:第一滑块
45.150:工作模块
46.160:第二滑块
47.200、200a、200b:第一伸缩模块
48.210:第一伸缩器
49.210e:第一伸缩方向
50.211:上方的第一伸缩器
51.212:下方的第一伸缩器
52.213:枢轴
53.300、300a、300b:第二伸缩模块
54.310:第二伸缩器
55.310e:第二伸缩方向
56.311:上方的第二伸缩器
57.312:下方的第二伸缩器
58.313:枢轴
59.320:动力装置
60.400:第一夹爪
61.410:第一片体
62.420:第一爪片
63.430:第一夹角
64.440:第一空隙
65.500:第二夹爪
66.510:第二片体
67.520:第二爪片
68.530:第二夹角
69.540:第二空隙
70.600、601:气囊
71.610:充气嘴
72.620:充气装置
73.630:气压传感器
74.700:控制器
75.901-905:步骤
76.l:左侧爪夹组
77.o:待抓物
78.p1、p2:部分
79.r:右侧爪夹组
80.x、y、z:轴
81.θ1:第一最小夹角
82.θ2:第二最小夹角
具体实施方式
83.以下将以图式揭露本发明的多个实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,熟悉本领域的技术人员应当了解到,在本发明部分实施方式中,这些实务上的细节并非必要的,因此不应用以限制本发明。此外,为简化图式起见,一些习知惯用的结构与组件在图式中将以简单示意的方式绘示之。另外,为了便于读者观看,图式中各组件的尺寸并非依实际比例绘示。
84.图1为本发明一实施方式的爪夹装置10的示意图。图2a为图1的爪夹装置10的侧视图。图2b为图1的爪夹装置10的上视图。如图1至图2b所示,爪夹装置10包括一支架100、一第一伸缩模块200、一第二伸缩模块300、一第一夹爪400、一第二夹爪500与一气囊600。支架100位于第一夹爪400与第二夹爪500之间,且支架100沿一延伸方向(如x轴方向,图2b)延伸。第一伸缩模块200与第二伸缩模块300分别位于支架100的二相对侧。第一伸缩模块200可伸缩地连接第一夹爪400,用以沿第一伸缩方向(如y轴方向,图1)伸缩移动,以带动第一夹爪400至定位,并保持第一夹爪400的所在位置。第二伸缩模块300可伸缩地连接第二夹爪500,用以沿第二伸缩方向(如y轴方向,图1)伸缩移动,以带动第二夹爪500至定位,并保持第二夹爪500的所在位置。第一夹爪400与第二夹爪500分别呈狭长片状,且第一夹爪400与第二夹爪500用以彼此接近以抓取一待抓物(图中未示),或者,彼此远离以释放待抓物。气囊600设置于第一夹爪400与第二夹爪500之间,用以与第一夹爪400、第二夹爪500协同抓取此待抓物。然而,本发明不限第一伸缩方向必然正交支架的延伸方向。
85.在本实施例中,第一伸缩模块200包含二第一伸缩器210。这些第一伸缩器210间隔地位于支架100的一侧,分别可伸缩地连接第一夹爪400,每个第一伸缩器210能够独立地推出或拉回第一夹爪400,且每个第一伸缩器210透过一枢轴213枢接第一夹爪400。具体来说,这些第一伸缩器210沿着第一夹爪400的长轴方向(如z轴)间隔配置。第二伸缩模块300包含二第二伸缩器310。这些第二伸缩器310间隔地位于支架100的另侧,分别可伸缩地连接第二
夹爪500。每个第二伸缩器310能够独立地推出或拉回第二夹爪500,且每个第二伸缩器310透过一枢轴313枢接第二夹爪500。具体来说,这些第二伸缩器310沿着第二夹爪500的长轴方向(如z轴)间隔配置。
86.如此,透过独立控制这些第一伸缩器210与第二伸缩器310的伸缩,爪夹装置10能够因应需求任意改变第一夹爪400与第二夹爪500的延伸角度,以展现出多个(例如十六种)抓取姿态而抓取预计的待抓物。
87.在本实施例中,第一夹爪400与第二夹爪500的外型大致相同,呈ㄑ字形或l字形。更具体地,第一夹爪400包含一第一片体410与一第一爪片420。第一夹爪400的第一爪片420连接第一片体410的末端,且朝第二夹爪500的方向延伸,使得第一片体410与第一爪片420具有一第一夹角430。同理,第二夹爪500包含一第二片体510与一第二爪片520。第二爪片520连接第二片体510的末端,且朝第一夹爪400的方向延伸,使得第二片体510与第二爪片520具有一第二夹角530。然而,本发明不限于第一夹爪400与第二夹爪500的外型、所述夹角、表面粗糙度及材质。
88.在本实施例中,举例来说,支架100包含一本体110与一管体120,管体120连接本体110与气囊600。气囊600具有充气嘴610,且充气嘴610位于管体120内,能够对气囊600进行充气或泄气。当气囊600被充气而沿着z轴方向膨胀至待抓物,使得气囊600位于待抓物与支架100之间。然而,本发明不限于气囊600的位置,其他实施例中,气囊600也可能不设置于支架100上,或者不位于待抓物上方。
89.本发明并未对气囊600的种类、数量、材料、充气量及表面粗糙度加以限制,其他实施例中,气囊600亦可能为类圆球、类方形或类圆柱等可充气对象、气囊600的材料种类亦可能是天然橡胶、合成橡胶与乳胶等可伸缩性材料。
90.图3为图1的爪夹装置10的方块图。如图1与图3,上述爪夹装置10更包含一动力装置320及一控制器700。动力装置320用以独立控制每个第一伸缩器210及第二伸缩器310,分别操作第一夹爪400与第二夹爪500的收放。控制器700电连接动力装置320,用以控制动力装置320的输出动力,以分别操作第一夹爪400与第二夹爪500的收放,而提供任一上述抓取姿态。
91.在本实施例中,每个第一伸缩器210及第二伸缩器310分别为广义可伸长的直动机构。举例来说,每个第一伸缩器210及第二伸缩器310例如为气动缸,且动力装置320例如为气动帮浦,能够驱动气压缸开合,并且以开与关两种操作状态,控制第一夹爪400及第二夹爪500的动作。然而,本发明不限于此,在其他实施例中,每个第一伸缩器210及第二伸缩器310亦可是气压缸、油压缸、电动缸、线性马达,齿轮传动等直动机构。
92.在本实施例中,爪夹装置10更包含一充气装置620。充气装置620连接气囊600的充气嘴610,以对气囊600充气。充气装置620电连接控制器700,故,控制器700能够控制充气装置620对气囊600持续或逐步充气,以及对气囊600所充气的特定气压。
93.此外,爪夹装置10更包含一气压传感器630。气压传感器630位于气囊600的充气嘴610内,用以感测气囊600内部目前所回馈的气压数据。故,控制器700依据所回馈的气压数据进行相应的处理步骤。举例来说,但不以此为限,当控制器700判断出所回馈的气压数据到达一特定值时,控制器700控制充气装置620停止对气囊600,且驱动动力装置320以让第一夹爪400与第二夹爪500抓取所述待抓物。然而,本发明不限于气压传感器630的配置位
置,在其他实施例中,气压传感器630也可能位于气囊600内部,或者,爪夹装置10也可能省略气压传感器630的存在。
94.图4a至图4c分别为图1的爪夹装置10于不同抓取姿态的操作示意。如图4a所示,在本实施例中,这些第一伸缩器以下简称上方的第一伸缩器211及下方的第一伸缩器212,上方的第一伸缩器211及下方的第一伸缩器212依序沿着z轴方向枢接第一夹爪400。同理,这些第二伸缩器以下简称上方的第二伸缩器311及下方的第二伸缩器312,上方的第二伸缩器311及下方的第二伸缩器312依序沿着z轴方向枢接第二夹爪500。
95.如此,当爪夹装置10受控制而操作第一夹爪400与第二夹爪500时,爪夹装置10将上方的第一伸缩器211收回第一夹爪400、上方的第二伸缩器311收回第二夹爪500、下方的第一伸缩器212推出第一夹爪400,且下方的第二伸缩器312推出第二夹爪500。故,爪夹装置10能够提供为对称之抓取姿态,且此时爪夹装置10的抓取姿态为展开姿态,以便用来抓取特定大小的待抓物,或是释放待抓物。
96.如第4b图所示,当爪夹装置10受控制而操作第一夹爪400与第二夹爪500时,上方的第一伸缩器211拉回第一夹爪400、上方的第二伸缩器311拉回第二夹爪500、下方的第一伸缩器212推出第一夹爪400,且下方的第二伸缩器312拉回第二夹爪500。故,此时爪夹装置10的抓取姿态为半展开姿态,以便能够紧密抓取待抓物。如此,爪夹装置10能够提供为非对称开合的姿态,以便用来抓取特定形状、大小的待抓物。
97.如图4c所示,当爪夹装置10受控制而操作第一夹爪400与第二夹爪500时,上方的第一伸缩器211推出第一夹爪400、上方的第二伸缩器311推出第二夹爪500、下方的第一伸缩器212拉回第一夹爪400,且下方的第二伸缩器312拉回第二夹爪500。故,此时爪夹装置10的抓取姿态为闭合姿态,以便用来更紧密抓取待抓物。
98.图5a为本发明一实施方式的爪夹装置11的示意图。图5b为图5a的爪夹装置11的侧视图。如图5a与图5b所示,图5a的爪夹装置11与图1的爪夹装置10大致相同,其差异在于,爪夹装置11更包含一延伸柱130、多个第一滑块140、一左侧爪夹组l与一右侧爪夹组r。左侧爪夹组l包含二第一伸缩器(即上方的第一伸缩器211及下方的第一伸缩器212)、二第二伸缩器(即上方的第二伸缩器311及下方的第二伸缩器312)、一第一夹爪400与一第二夹爪500。右侧爪夹组r分别包含另二第一伸缩器(即上方的第一伸缩器211及下方的第一伸缩器212)、另二第二伸缩器(即上方的第二伸缩器311及下方的第二伸缩器312,参考图5a)、另一第一夹爪400与另一第二夹爪500(参考图5a)。延伸柱130具有一延伸方向131,意即,延伸柱130沿着此延伸方向131直线延伸。每个第一滑块140的一侧可滑移地接合于延伸柱130上,左侧爪夹组l固接其中一第一滑块140上,且右侧爪夹组r固接另一第一滑块140上。气囊600位于左侧爪夹组l与右侧爪夹组r之间,固接至又一第一滑块140上。
99.故,左侧爪夹组l、右侧爪夹组r及气囊600能够分别透过对应的第一滑块140,在延伸柱130上沿此延伸方向131进行任意的往返滑移。如此,爪夹装置11便能够被带动至特定位置,以便进行后续的抓物或卸除。
100.须了解到,本发明并未对上述延伸柱130的外型、尺寸大小与材料加以限制,例如,延伸柱130为圆柱型、类梯形等长条形状;本发明也未对上述延伸柱130上能够组装的滑块、爪夹及气囊的数量、外型、尺寸大小与材料加以限制。若滑块为多个,本发明也未对第一滑块140在延伸柱130上之间距大小加以限制。
101.此外,如图5a与图5b,这些第一夹爪400彼此间隔并排于支架100的一侧。这些第二夹爪500彼此间隔并排于支架100的另侧。更具体地,这些第一夹爪400与这些第二夹爪500皆沿上述延伸方向131间隔并排。此外,在本实施例中,这些第一夹爪400与这些第二夹爪500彼此对齐配置,换句话说,任二相邻的第一夹爪400之间具有一第一空隙440,且任二相邻的第二夹爪500之间具有一第二空隙540。其中一第一夹爪400对齐(或重叠)其中一第二夹爪500,第二空隙540对齐(或重叠)第一空隙440,且另一第一夹爪400对齐另一第二夹爪(图中未示)。
102.此外,如图5b所示,爪夹装置11更包含多个工作模块150及多个第二滑块160。每个第二滑块160的一侧固接其中一工作模块150,第二滑块160的另侧可滑移地接合于延伸柱130上。故,每个工作模块150能够透过第二滑块160的作用,在延伸柱130上沿此延伸方向131进行往返的滑移,以便移至合适位置而搭配爪夹装置11的运作。故,由于任意的工作模块150能够透过第二滑块160作为衔接机构以组合至爪夹装置11上,此爪夹模块具有高度的可扩充性。
103.需了解到,本发明不限工作模块150的种类,例如,工作模块150为爪夹、气囊600、充气装置620、气压传感器630等合适模块。
104.图6a为图5a的爪夹装置11的操作示意图。图6b为图6a的爪夹装置11的侧视图。如图6a与图6b所示,由于这些第一伸缩器211、212能够各别独立地带动这些第一夹爪400,以及这些第二伸缩器311、312能够各别独立地带动这些第二夹爪500,控制器700(图3)能够依据待抓物o的外型及尺寸,带动特定第一夹爪400及特定的第二夹爪500以匹配待抓物o的外型及尺寸。
105.举例来说,如图6a及图6b,当欲抓取的待抓物o为截面积不一的物品(例如椎状物体)时,左侧爪夹组l的第一夹爪400及第二夹爪500被调整为闭合姿态,意即,爪夹装置11控制第一伸缩器211、212及第二伸缩器311、312完全收回左侧爪夹组l的第一夹爪400及第二夹爪500(图6a),使得左侧爪夹组l的第一夹爪400及第二夹爪500能够共同抓取此待抓物o中截面积较小的部分p1,以及右侧爪夹组r的第一夹爪400及第二夹爪500被调整为展合姿态,意即,控制第一伸缩器211、212及第二伸缩器311、312完全推出右侧爪夹组r的第一夹爪400及第二夹爪500(图6b),使得右侧爪夹组r的第一夹爪400及第二夹爪500抓持此待抓物o中截面积较大的部分p2。此时,气囊600更被充气至待抓物o,使得气囊600能够稳定固持待抓物o,降低待抓物o从爪夹装置11上滑落的机率,进而提高爪夹装置11的通用性。
106.图7a为本发明一实施方式的爪夹装置12的上视图。图7a的爪夹装置12与图2b的爪夹装置10的差异在于,如图7a所示,第一伸缩器210的第一伸缩方向210e与第二伸缩器310的第二伸缩方向310e彼此不同轴,且第一伸缩方向210e、第二伸缩方向310e与支架100的延伸方向100e彼此相交。换句话说,第一伸缩方向210e与第二伸缩方向310e共同呈现v字形,且第一伸缩方向210e与延伸方向100e之间所形成的第一最小夹角θ1与第二伸缩方向310e与延伸方向100e之间所形成的第二最小夹角θ2皆为彼此相同的锐角。此外,气囊601位于第一夹爪400与第二夹爪500之间所间隔形成的空间之外,第一夹爪400、第二夹爪500能够将一待抓物(图中未示)推至气囊601的一侧,以便第一夹爪400、第二夹爪500与气囊601能够更有效地共同固持所述的待抓物。
107.然而,本发明不限上述第一最小夹角θ1必然相同于第二最小夹角θ2,其他实施例
中,图7b为本发明一实施方式的爪夹装置13的上视图,在图7b所示的爪夹装置13中,第一伸缩方向210e与延伸方向100e之间所形成的第一最小夹角θ1不同于第二伸缩方向310e与延伸方向100e之间所形成的第二最小夹角θ2。
108.图8为本发明一实施方式的爪夹装置14的上视图。图8的爪夹装置14与图7a的爪夹装置12的差异在于,如图8所示,第一夹爪400与第一伸缩模块200a、200b的数量分别为2个,以及第二夹爪500与第二伸缩模块300a、300b的数量分别为2个时,其中一第一伸缩模块200a与其中一第二伸缩模块300a设置支架100的一端100a,另一第一伸缩模块200b与另一第二伸缩模块300b设置于支架100的另端100b。
109.更具体地,此些第一伸缩模块200a、200b分别设置于支架100的二相对侧,此些第二伸缩模块300a、300b分别设置于支架100的二相对侧,其中一第一伸缩模块200a与另一第二伸缩模块300b设置于支架100的同侧,且其中一第二伸缩模块300a与另一第一伸缩模块200b设置于支架100的同侧。此些第一伸缩模块200的第一伸缩方向210e彼此平行,此些第二伸缩模块300的第二伸缩方向310e彼此平行,气囊600连接支架100,位于此些第一夹爪400与此些第二夹爪500所定义的范围内,以便从支架100朝向待抓物(图中未示)的方向进行充气膨胀(参考图1)。
110.图9为本发明一实施方式的待抓物的抓取方法的流程图。如图9所示,此抓取方法包含步骤901至步骤905,如下。在步骤901中,展开爪夹装置的第一夹爪与第二夹爪;在步骤902中,移动爪夹装置或待抓物,直到待抓物进入第一夹爪与第二夹爪之间;在步骤903中,对爪夹装置的气囊进行充气;以及,在步骤904中,判断爪夹装置的气囊是否触压所述待抓物,若是,进行步骤905,否则,进行步骤903。在步骤905中,收合第一夹爪与第二夹爪以抓取所述待抓物。
111.更具体地,在步骤903中更包含二步骤如下。取得上述气囊的最大可承受气压,且控制上述充气装置在最大可承受气压的前提下对气囊持续充气。
112.在步骤904中更包含二步骤如下。依据气压传感器所回馈的气压数据,判断气囊内的气压是否产生异常,当判断出气囊内的气压已产生异常时,则确认气囊已触压所述待抓物。如此,有助爪夹装置能够在适当距离下实时进行闭合姿态,进而提升爪夹装置抓取待抓物的准度以及降低运算复杂度。
113.故,透过以上各实施例的所述架构,本发明爪夹装置能够配合现场操作者的判断,快速地改变爪夹模块的型态,保持抓取对象的稳定度,以利提升自动化流程整体的时间效率。此外,本发明另一优点在于可大量省去制造成本,省下步进马达、相关传动件与其控制器的费用。
114.最后,上述所揭露的各实施例中,并非用以限定本发明,任何熟习此技艺者,在不脱离本发明的精神和范围内,当可作各种的更动与润饰,皆可被保护于本发明中。因此本发明的保护范围当视后附的申请专利范围所界定者为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1