一种基于机器人的开关柜操作装置及方法与流程
1.本发明属于机器人技术领域,尤其涉及一种基于机器人的开关柜操作装置及方法。
背景技术:
2.电网中存在大量配电室,这些配电室直接关系到电网的正常运行,通常配电室处于无人值守状态,在需要操作设备时,由远方的自动化系统进行遥控操作。但是并非配电室所有的设备都实现了自动化,由于配电室数量众多,自动化设备能接入的间隔容量有限,一般都是仅仅在高压侧的开关柜实现自动化和遥控功能,其他没有遥控功能的开关柜仍需要人工去操控设备,在设备故障出现停电时,这些没有遥控功能的支出间隔需等待运行人员到达现场操作,延误了故障恢复时间。
技术实现要素:
3.为了解决现有技术中存在的缺点和不足,本发明提出了一种基于机器人的开关柜操作装置,包括控制器、云台相机、激光测距模块、操作模块、光纤检测模块以及机械臂;
4.所述云台相机安装在所述机械臂的末端,所述操作模块通过第一支架连接在机械臂上,所述激光测距模块安装在第一支架上,所述光纤检测模块通过第二支架连接在机械臂上,所述机械臂通过转轴安装在机器人的机身上;
5.所述控制器分别与云台相机、激光测距模块、操作模块以及光纤检测模块进行通信。
6.可选的,所述操作模块包括l形开门结构以及柔性按钮;
7.所述l形开门结构用于与开关柜的柜门把手扣合之后拉开柜门把手;
8.所述柔性按钮包括伸缩杆、垫块与弹簧,所述伸缩杆的前端与弹簧连接,所述弹簧与垫块连接。
9.可选的,所述云台相机用于采集开关柜上操作面板以及光纤配线架的图像信息,通过无线网络将采集到的图像信息发送给控制器。
10.可选的,所述机械臂为六轴机械臂。
11.可选的,所述开关柜操作装置还包括安装在机器人机身底部的自动充电模块,所述自动充电模块包括红外接收装置、充电极板以及充电指示灯,所述充电极板与机器人的锂电池相连。
12.可选的,所述开关柜操作装置还包括安装在机器人底盘的agv驱动模块,所述agv驱动模块包括陀螺仪、驱动轮、万向轮、安全触边以及避障激光模块;
13.所述安全触边、避障激光模块均安装在机器人底盘的前端,所述陀螺仪安装在机器人底盘的后端,所述驱动轮安装在机器人底盘的中心位置。
14.本发明还提出了一种基于机器人的开关柜操作方法,所述开关柜操作方法使用上述开关柜操作装置对开关柜进行操作,包括:
15.通过agv驱动模块使机器人移动到开关柜前;
16.通过云台相机采集开关柜上操作面板的图像信息;
17.通过控制器接收图像信息,根据图像信息得到柜门把手与开合闸按钮的坐标;
18.控制机械臂驱动操作模块移动至所述坐标的位置,通过操作模块拉开柜门把手并按动开合闸按钮。
19.可选的,所述控制机械臂驱动操作模块移动至所述坐标的位置,通过操作模块拉开柜门把手并按动开合闸按钮,包括:
20.通过机械臂驱动操作模块中l形开门结构移动到柜门把手的位置,将l形开门结构与柜门把手扣合,通过机械臂向后方移动拉开柜门把手;
21.通过机械臂驱动操作模块中的柔性按钮移动到开合闸按钮的位置,通过伸缩杆调整垫块与开合闸按钮之间的距离,通过弹簧驱动垫块按动开关柜操作面板上的开合闸按钮。
22.可选的,所述开关柜操作方法还包括:
23.通过激光测距模块监测操作模块与开关柜上操作面板之间的距离;
24.当所述距离小于预设距离阈值时,向控制器发出告警信号,停止机械臂移动。
25.可选的,所述开关柜操作方法还包括对开关柜中的光纤进行通断检测,具体包括:
26.通过云台相机识别开关柜中的光纤配线架,对光纤配线架上的尾纤孔进行定位,得到尾纤孔坐标;
27.通过控制器根据尾纤孔坐标生成驱动信号,将驱动信号发送给机械臂;
28.通过机械臂驱动光纤检测模块移动至尾纤孔的位置,将测试激光通过尾纤孔射入待测光纤;
29.若在待测光纤的另一端未检测到测试激光,则判断待测光纤出现断芯故障。
30.本发明提供的技术方案带来的有益效果是:
31.通过单臂协作机器人整合了打开开关柜柜门、操控开合闸以及光纤检测的功能,通过视觉定位提高机器人操控动作的精准性,同时搭配激光测距技术来保护设备面板按钮不被机器人损坏,可以一体实现配电室设备巡检、操控、排障工作。
附图说明
32.为了更清楚地说明本发明的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
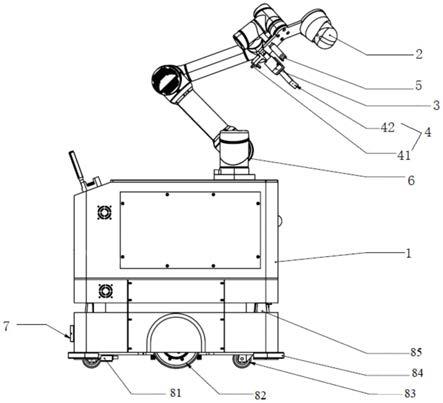
33.图1为本发明提出的一种基于机器人的开关柜操作装置的结构示意图。
具体实施方式
34.为使本发明的结构和优点更加清楚,下面将结合附图对本发明的结构作进一步地描述。
35.如图1所示,本发明提出了一种基于机器人的开关柜操作装置,包括控制器1、云台相机2、激光测距模块3、操作模块4、光纤检测模块5以及机械臂6;
36.所述云台相机2安装在所述机械臂6的末端,所述操作模块4通过第一支架连接在
机械臂6上,所述激光测距模块3安装在第一支架上,所述光纤检测模块5通过第二支架连接在机械臂6上,所述机械臂6通过转轴安装在机器人的机身上;
37.所述控制器1分别与云台相机2、激光测距模块3、操作模块4、光纤检测模块5进行通信。
38.所述操作模块包括l形开门结构41以及柔性按钮42。其中,所述l形开门结构41用于与开关柜的柜门把手扣合之后拉开柜门把手,所述柔性按钮42包括伸缩杆、垫块与弹簧,所述伸缩杆的前端与弹簧连接,所述弹簧与垫块连接。
39.本实施例中,所述垫块为聚氨酯垫块,同时,通过将激光测距模块3安装在第一支架上,能够更准确地测量垫块与操作面板之间的距离,避免在对开关柜进行操作时损伤操作面板。
40.所述云台相机2用于采集开关柜上操作面板以及光纤配线架的图像信息,通过无线网络将采集到的图像信息发送给控制器1。
41.控制器1基于接收到的图像信息进行图像识别,从而得到操作面板上开合闸按钮和光纤配线架上尾纤孔的坐标信息。
42.所述机械臂6为六轴机械臂,从而支持机械臂在空间上的自由转动。
43.所述开关柜操作装置还包括安装在机器人机身底部的自动充电模块7,所述自动充电模块7包括红外接收装置、充电极板以及充电指示灯,所述充电极板与机器人的锂电池相连。
44.当机器人成功对接到充电桩开始充电时,充电指示灯亮起。
45.所述开关柜操作装置还包括安装在机器人底盘的agv驱动模块8,所述agv驱动模块包括陀螺仪81、驱动轮82、万向轮83、安全触边84以及避障激光模块85。所述安全触边、避障激光模块均安装在机器人底盘的前端,所述陀螺仪安装在机器人底盘的后端,所述驱动轮安装在机器人底盘的中心位置。
46.本实施例中,通过控制器1向驱动轮发送驱动信息,同时通过陀螺仪以及避障激光模块接收机器人在移动过程中的反馈信息,从而及时调整机器人的移动路径。所述陀螺仪用于测量机器人移动时的角速度,所述避障激光模块通过发射激光并计算接收到激光的时间,判断机器人与障碍物的距离。驱动轮在移动时带动位于机器人底盘四个边角的万向轮移动,以维持机器人的平稳移动。
47.本实施例中还在机器人底盘的前端设置了安全触边,保证及时因算法判断失误导致机器人碰撞到障碍物,也可以通过安全触边得到缓冲,从而减少对机器人的损伤。
48.实施例二
49.本发明提出了一种基于机器人的开关柜操作方法,所述开关柜操作方法上述开关柜操作装置对开关柜进行操作,包括:
50.步骤一:通过agv驱动模块使机器人移动到开关柜前。
51.过控制器1向驱动轮发送驱动信息,同时通过陀螺仪以及避障激光模块接收机器人在移动过程中的反馈信息,从而及时调整机器人的移动路径。所述陀螺仪用于测量机器人移动时的角速度,所述避障激光模块通过发射激光并计算接收到激光的时间,判断机器人与障碍物的距离。驱动轮在移动时带动位于机器人底盘四个边角的万向轮移动,以维持机器人的平稳移动。
52.步骤二:通过云台相机采集开关柜上操作面板的图像信息。
53.控制器1基于接收到的图像信息进行图像识别,从而得到操作面板上开合闸按钮和光纤配线架上尾纤孔的坐标信息。
54.步骤三:通过控制器接收图像信息,根据图像信息得到柜门把手与开合闸按钮的坐标。
55.步骤四:控制机械臂驱动操作模块移动至所述坐标的位置,通过操作模块拉开柜门把手并按动开合闸按钮。
56.其中,步骤四具体包括:
57.通过机械臂驱动操作模块中l形开门结构移动到柜门把手的位置,将l形开门结构与柜门把手扣合,通过机械臂向后方移动拉开柜门把手;
58.通过机械臂驱动操作模块中的柔性按钮移动到开合闸按钮的位置,通过伸缩杆调整垫块与开合闸按钮之间的距离,通过弹簧驱动垫块按动开关柜操作面板上的开合闸按钮。
59.本实施例中,所述垫块为聚氨酯垫块,同时,通过将激光测距模块安装在第一支架上,能够更准确地测量垫块与操作面板之间的距离,避免在对开关柜进行操作时损伤操作面板。
60.本实施例中,所述开关柜操作方法还包括:
61.通过激光测距模块监测操作模块与开关柜上操作面板之间的距离;
62.当所述距离小于预设距离阈值时,向控制器发出告警信号,停止机械臂移动,提高了机器人对开关柜进行操作时的安全性。
63.所述开关柜操作方法还包括对开关柜中的光纤进行通断检测,具体包括:
64.通过云台相机识别开关柜中的光纤配线架,对光纤配线架上的尾纤孔进行定位,得到尾纤孔坐标;
65.通过控制器根据尾纤孔坐标生成驱动信号,将驱动信号发送给机械臂;
66.通过机械臂驱动光纤检测模块移动至尾纤孔的位置,将测试激光通过尾纤孔射入待测光纤;
67.若在待测光纤的另一端未检测到测试激光,则判断待测光纤出现断芯故障。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1