一种反馈检测用机械臂的制作方法
1.本发明涉及机械臂技术领域,具体涉及一种反馈检测用机械臂。
背景技术:
2.机械臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。机械臂可以代替操作人员进行工作,减轻工作人员的劳动强度,实现安全高效的生产,延伸了机械手的操作范围。
3.现有的机械臂在操作时有3个运动:伸缩、旋转和升降。实现旋转、升降运动是由横臂和产柱去完成。机械臂的基本作用是将机械爪移动到所需位置和承受抓取工件的最大重量,以及机械臂本身的重量等。当安装高速旋转工作的机械爪,机械爪可能会因为被操作物体卡住而造成机械爪的损坏,且机械爪卡死后如果电机继续输出扭矩容易造成机械臂损坏,维修成本高,也给人身造成安全隐患。
技术实现要素:
4.本发明的发明人发现,利用惯性力实现当机械爪卡死时将输出端与机械爪分离,能够解决机械爪卡死时容易造成机械爪和机械臂容易损坏的问题。
5.本发明的一种反馈检测用机械臂采用如下技术方案:一种反馈检测用机械臂,包括机械臂和保护器。保护器包括输出轴、随动机构和调节装置。输出轴的一端安装于机械臂,以将动力输出。随动机构可滑动地设置于输出轴的另一端。且调节装置包括多个离心块、自锁机构、传动机构和复位机构,多个离心块通过传动机构和所述自锁机构连接于输出轴且绕输出轴的旋转轴线均布,以在随输出轴转动,且在多个离心块在绕第一时针方向转动的过程中逐渐向外移动并通过传动机构和所述自锁机构带动所述随动机构沿输出轴向机械臂滑动,且至少在所述输出轴急停时所述随动机构连接于输出轴以随输出轴转动,在所述输出轴急停时多个离心块通过自锁机构相互锁定,并通过自锁机构和传动机构对随动机构的相对于输出轴的位置进行锁定,以阻碍复位机构促使所述随动机构沿输出轴向远离机械臂的方向滑动。第二时针方向与第一时针方向相反,而且多个离心块在绕第二时针方向转动后并急停时,多个离心块通过自锁机构解除相互锁定,以使所述复位装置促使所述随动机构沿输出轴向远离机械臂的方向滑动,使输出轴空转。
6.进一步地,传动机构包括基盘、固定环和多个连杆组件。基盘安装于机械臂,输出轴安装于基盘;固定环设置于随动机构的外侧;多个连杆组件沿输出轴的周向均布,每个连杆组件包括第一连杆和第二连杆,第一连杆和第二连杆的一端铰接;第一连杆的另一端铰接于基盘,第二连杆的另一端铰接于固定环;第一连杆的长度大于第二连杆的长度。
7.自锁机构包括滑杆、滑块和引导斜面;滑杆穿设于第一连杆和第二连杆的铰接位
置处,滑杆的一端连接离心块,另一端连接于滑块;沿第二时针方向,引导斜面设置于离心块上,且引导斜面从离心块的靠近输出轴的侧面倾斜延伸至离心块的背离滑块的端面,以连接离心块的靠近输出轴的侧面与离心块的背离滑块的端面。
8.进一步地,复位机构包括套筒和弹簧;套筒套装于输出轴;输出轴靠近机械臂的一端设置有挡板,输出轴通过挡板安装于基盘;弹簧套装于输出轴,且处于套筒和挡板之间,以使随动机构在沿输出轴向机械臂滑动时通过套筒挤压弹簧,使弹簧进行蓄力。
9.进一步地,第一连杆和第二连杆的铰接处处于第一连杆与基盘的铰接处的内侧和固定环的内侧,第二连杆包括相互连接的第一杆段和第二杆段,第一杆段和第二杆段在连接位置处与固定环铰接,第一杆段和第二杆段之间形成钝角,第二杆段平行于输出轴;随动机构为连接器,连接器用于安装机械爪,连接器的外侧沿连接器的周向方向设置有锁紧凸台,锁紧凸台处于多个第二杆段的内侧,且第二杆段的末端用于锁紧凸台接触,以带动随动机构移动挤压套筒。
10.进一步地,输出轴的远离机械臂的一端设置有第一花键,连接器的朝向套筒的一端设置有用于与第一花键配合的第二花键。
11.进一步地,复位机构还包括止挡凸环和限位套,止挡凸环设置于套筒的朝向弹簧的一端,限位套的一端安装于挡板或基盘,另一端与止挡凸环顶压接触。
12.进一步地,滑杆为弹性杆;或者滑杆包括第三杆段和第四杆段,第三杆段为刚性杆,第四杆段为弹性杆,第四杆段连接滑块;或者,滑杆包括第五杆段和第六杆段,均为刚性杆,第五杆段和第六杆段铰接,铰接处设置有保持滑杆平直的扭簧。
13.进一步地,滑杆从连接于滑块的一端向连接于离心块的一端逐渐变细,滑杆与第一连杆和第二连杆的铰接处具有预紧摩擦力;第一连杆与基盘的铰接位置处设置有驱使第一连杆向内收缩的扭簧。
14.进一步地,离心块的重心靠近引导斜面。
15.进一步地,离心块、自锁机构和连杆组件均为四个;引导斜面与垂直于滑杆的参考平面之间的夹角大于45
°
。
16.本发明的有益效果是:本发明的一种反馈检测用机械臂在工作时如果机械爪被操作对象卡死时,能够立即做出反应,使安装机械爪的连接器立即与输出轴脱离,防止机械臂损坏。具体地,机械爪被操作对象卡死时,滑块从相应的离心块中脱离,使得四个离心块、自锁机构和传动机构在第一连杆与基盘之间的扭簧的扭力和弹簧的弹力作用下进行一定的内缩,同时弹簧通过套筒顶推连接器使第二花键与第一花键脱离,使输出轴逆时针空转,防止机械臂损坏,安全性能高。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
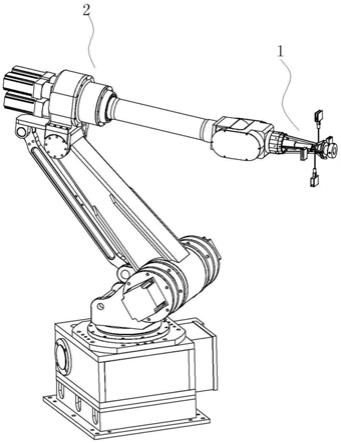
18.图1为本发明的一种反馈检测用机械臂的实施例的结构示意图;图2为本发明的一种反馈检测用机械臂的实施例的保护器的结构示意图;
图3为本发明的一种反馈检测用机械臂的实施例的初始状态下保护器的剖视图;图4为本发明的一种反馈检测用机械臂的实施例的保护器的安装时连杆机构受离心块的离心力形变的主视剖视图;图5为本发明的一种反馈检测用机械臂的实施例的保护器的锁紧状态下的结构示意图;图6为本发明的一种反馈检测用机械臂的实施例的保护器的锁紧状态下的主视剖视图;图7为本发明的一种反馈检测用机械臂的实施例的离心块、滑杆和滑块的结构配合图;图8为本发明的一种反馈检测用机械臂的实施例的连接器的结构示意图;图9为本发明的一种反馈检测用机械臂的实施例的滑杆的一种结构剖视图;图10为本发明的一种反馈检测用机械臂的实施例的滑杆的另一种结构剖视图;图11为本发明的一种反馈检测用机械臂的实施例的保护器的安装时连杆机构受离心块的离心力形变的侧视剖视图;图12为本发明的一种反馈检测用机械臂的实施例的保护器的滑块与离心块相抵的侧视剖视图;图13为本发明的一种反馈检测用机械臂的实施例的保护器的滑块沿引导斜面滑动的侧视剖视图;图14为本发明的一种反馈检测用机械臂的实施例的保护器的锁紧机构锁定状态的侧视剖视图。
19.图中:1、保护器;2、机械臂;3、基盘;31、限位套;4、离心块;5、第一连杆;6、套筒;61、止挡凸环;7、输出轴;71、第一花键;72、挡板;8、第二连杆;9、连接器;91、第二花键;10、固定环;11、引导斜面;12、滑块;13、锁紧凸台;14、弹簧;15、滑杆;151、第三杆段;152、第四杆段;153、第五杆段;154、第六杆段。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.本发明的一种反馈检测用机械臂的实施例,如图1至图8所示,一种反馈检测用机械臂,包括机械臂2和保护器1。保护器1包括输出轴7、随动机构和调节装置。输出轴7的一端安装于机械臂2,以将动力输出。随动机构可滑动地设置于输出轴7的另一端。调节装置包括多个离心块4、自锁机构、传动机构和复位机构,多个离心块4通过传动机构和自锁机构连接于输出轴7且绕输出轴7的旋转轴线均布,以在随输出轴7转动,且在多个离心块4在绕顺时针方向转动的过程中逐渐向外移动并通过传动机构和自锁机构带动随动机构沿输出轴7向机械臂2滑动,且至少在输出轴7急停时随动机构连接于输出轴7以随输出轴7转动,在输出轴7急停时多个离心块4通过自锁机构相互锁定,并通过自锁机构和传动机构对随动机构的相对于输出轴7的位置进行锁定,以阻碍复位机构促使随动机构沿输出轴7向远离机械臂2
的方向滑动。而且多个离心块4在绕逆时针方向转动后并急停时,多个离心块4通过自锁机构解除相互锁定,以使复位装置促使随动机构沿输出轴7向远离机械臂2的方向滑动,使输出轴7空转。
22.在本实施例中,传动机构包括基盘3、固定环10和多个连杆组件。基盘3安装于机械臂2,输出轴7安装于基盘3。固定环10设置于随动机构的外侧。多个连杆组件沿输出轴7的周向均布,每个连杆组件包括第一连杆5和第二连杆8,第一连杆5和第二连杆8的一端铰接。第一连杆5的另一端铰接于基盘3,第二连杆8的另一端铰接于固定环10。第一连杆5的长度大于第二连杆8的长度,以保证第二连杆8发挥作用。
23.自锁机构包括滑杆15、滑块12和引导斜面11。滑杆15穿设于第一连杆5和第二连杆8的铰接位置处,滑杆15的一端连接离心块4,另一端连接于滑块12。沿逆时针方向,引导斜面11设置于离心块4上,且引导斜面11从离心块4的靠近输出轴7的侧面倾斜延伸至离心块4的背离滑块12的端面,以连接离心块4的靠近输出轴7的侧面与离心块4的背离滑块12的端面。
24.在本实施例中,复位机构包括套筒6和弹簧14。套筒6套装于输出轴7。输出轴7靠近机械臂2的一端设置有挡板72,输出轴7通过挡板72安装于基盘3。弹簧14套装于输出轴7,且处于套筒6和挡板72之间,以使随动机构在沿输出轴7向机械臂2滑动时通过套筒6挤压弹簧14,使弹簧14进行蓄力。
25.在本实施例中,第一连杆5和第二连杆8的铰接处处于第一连杆5与基盘3的铰接处的内侧和固定环10的内侧,第二连杆8包括相互连接的第一杆段和第二杆段,第一杆段和第二杆段在连接位置处与固定环10铰接,第一杆段和第二杆段之间形成钝角,第二杆段平行于输出轴7。随动机构为连接器9,连接器9用于安装机械爪,连接器9的外侧沿连接器9的周向方向设置有锁紧凸台13,锁紧凸台13处于多个第二杆段的内侧,且第二杆段的末端用于锁紧凸台13接触,以带动随动机构移动挤压套筒6。
26.在本实施例中,输出轴7的远离机械臂2的一端设置有第一花键71,连接器9的朝向套筒6的一端设置有用于与第一花键71配合的第二花键91。
27.在本实施例中,复位机构还包括止挡凸环61和限位套31,止挡凸环61设置于套筒6的朝向弹簧14的一端,限位套31的一端安装于挡板72或基盘3,另一端与止挡凸环61顶压接触。
28.在本实施例中,滑杆15为弹性杆。或者如图9至图10所示滑杆15包括第三杆段151和第四杆段152,第三杆段151为刚性杆,第四杆段152为弹性杆,第四杆段152连接滑块12。或者,滑杆15包括第五杆段153和第六杆段154,均为刚性杆,第五杆段153和第六杆段154铰接,铰接处设置有保持滑杆15平直的扭簧,以当机械爪被操作对象卡死时,保证滑杆15和滑块12从离心块4的背离与其连接在同一滑杆15的滑块12的端面中脱离。
29.在本实施例中,滑杆15从连接于滑块12的一端向连接于离心块4的一端逐渐变细,滑杆15与第一连杆5和第二连杆8的铰接处具有预紧摩擦力,以使滑杆15在初始位置被夹紧,使得垂直于滑杆15的力比较较大,进而使得之间的摩擦力比较较大,防止掉落离开初始位置。第一连杆5与基盘3的铰接位置处设置有驱使第一连杆5向内收缩的扭簧。
30.在本实施例中,离心块4的重心靠近引导斜面11,以使输出轴7在顺时针方向转动时多个离心块4在离心力和惯性的作用下在统一平面内。
31.在本实施例中,离心块4、自锁机构和连杆组件均为四个。引导斜面11与垂直于滑杆15的参考平面之间的夹角大于45
°
,以使多个离心块4在绕顺时针方向转动的过程中逐渐向外移动并通过传动机构和自锁机构带动随动机构沿输出轴7向机械臂2滑动。
32.安装时,如图2至图6所示,启动机械臂2,使基盘3、输出轴7、四个离心块4、四个自锁机构和四个连杆组件绕顺时针方向转动,四个离心块4向外移动,并在离心力的作用下带动四个连杆组件向外扩张,四个第二连杆8的第二杆段通过顶推锁紧凸台13使连接器9沿输出轴7向靠近机械臂2的一侧滑动。连接器9滑动时顶推套筒6,套筒6顶推弹簧14,由于弹簧14的预紧力逐渐变大,连接器9滑动到相应位置时无法依靠四个离心块4的离心力继续滑动,并保持在如图11位置,此时驱动基盘3转动的电机急停,输出轴7和四个连杆组件停止转动,四个离心块4、滑杆15和滑块12在惯性的作用下相对于基盘3、输出轴7和四个连杆组件移动,具体地,如图12至图14所示,滑杆15沿第一连杆5和第二连杆8的铰接处滑动,滑块12顶到下一离心块4,且沿引导斜面11滑至离心块4的背离与其连接在同一滑杆15的滑块12的端面。滑块12在沿引导斜面11滑动的过程中第一连杆5和第二连杆8的铰接处逐渐远离输出轴7,四个第二连杆8的第二杆段继续顶推锁紧凸台13,使连接器9推动套筒6挤压弹簧14并继续向靠近机械臂2的一侧移动,直至第二连杆8的第一杆段垂直于输出轴7,第一花键71与第二花键91啮合。且由于第一连杆5与基盘3之间的扭簧的扭力和弹簧14的弹力都有促使滑杆15收缩的作用力,但滑块12被离心块4的背离与其连接在同一滑杆15的滑块12的端面挡到,使得四个离心块4实现相互锁定。
33.工作时,在连接器9上安装机械爪,启动机械臂2使基盘3、输出轴7、四个离心块4、四个自锁机构和四个连杆组件绕逆时针方向转动。由于第一花键71与第二花键91啮合,输出轴7转动带动连接器9同步转动,使机械爪进行工作。
34.当机械爪被操作对象卡死时,四个离心块4、滑杆15和滑块12在惯性的作用下相对于基盘3、输出轴7和四个连杆组件移动,具体地,离心块4由于惯性沿滑杆移动,并促使抵靠于其上的滑块12从该离心块4的脱离,同时离心块4会带动连接于其的滑块12从相应的离心块4上脱离,也就是说,离心块4会在连接于其上的滑块12的带动下以及相应滑块12的推动下,沿引导斜面11从相应滑块12上脱离。使得四个离心块4、自锁机构和传动机构在第一连杆5与基盘3之间的扭簧的扭力和弹簧14的弹力作用下进行一定的内缩,同时弹簧14通过套筒6顶推连接器9使第二花键91与第一花键71脱离,使输出轴7逆时针空转,四个离心块4、自锁机构、传动机构由于转动离心力的作用,可处于如图11所示的状态。
35.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1