一种具备绳索自动张紧功能的伸缩运动装置的制作方法
[0001]
本实用新型涉及康复机器人技术领域,特别是涉及一种具备绳索自动张紧功能的伸缩运动装置。
背景技术:
[0002]
在医疗机器人中,为了使执行机构的结构更加紧凑、动力利用率更高,经常将动力输出装置(如电机-减速器模块)安置于远离执行机构的机架上,使用绳索(如钢丝绳)将动力传输至运动执行机构。上肢康复机器人在工作过程中,除了要克服机械臂自重,还需为患者提供较大的辅助力,因此,将电机-减速器和配重模块布置于机架上可减轻机械臂的重量、提高动力利用效率。利用钢丝绳实现远距离动力传输,关键是合理设计钢丝绳的空间布局。在实践中,采用滑轮实现钢丝绳空间布局可有效降低摩擦力,减少动力损耗。由于电机-钢丝绳
-ꢀ
滑轮-驱动关节传动链较长,中间会经过伸缩机构(实现整个机械臂的升降以满足不同身高的患者),机器人工作过程中电机或者配重与驱动关节之间的钢丝绳长度会发生改变,从而使钢丝绳传动失效。
[0003]
因此,需要设计出一种具备绳索自动张紧功能的伸缩运动装置,以解决机械臂升降导致的钢丝绳长度变化问题。
技术实现要素:
[0004]
为了克服现有技术的上述不足,本实用新型提出了一种具备绳索自动张紧功能的伸缩运动装置,解决现有康复机器人在控制机械臂升降过程中,因钢丝绳长度变化导致传动失效的技术问题。
[0005]
本实用新型是通过以下技术方案实现的:
[0006]
一种具备绳索自动张紧功能的伸缩运动装置,包括伸缩运动机构及钢丝绳长度补偿机构,
[0007]
所述伸缩运动机构包括底板及设于所述底板上的电机-减速器,所述电机-减速器输出端安装有齿轮齿条机构一,所述齿轮齿条机构一的输出端固定在升降板上;
[0008]
所述钢丝绳长度补偿机构包括安装在电机-减速器输出端的齿轮齿条机构二,所述齿轮齿条机构二通过线轨滑块组件二与底板滑动连接,所述线轨滑块组件二经滑轮组与升降板连接,钢丝绳的一端连接配重模块,所述钢丝绳的另一端绕过所述滑轮组与患者手臂连接。
[0009]
进一步的,所述线轨滑块组件二经动轮安装板连接滑轮组,所述滑轮组包括动轮、滚轮一、滚轮二、滚轮三,所述动轮固定在动轮安装板上,所述动轮两侧安装有滚轮二、滚轮三,所述滚轮二、滚轮三均与底板连接固定,所述滚轮一安装在升降板上,所述钢丝绳的首端连接配重模块,所述钢丝绳的尾端依次绕过滚轮三、动轮、滚轮二、滚轮一后与患者手臂连接。
[0010]
进一步的,所述齿轮齿条机构一包括安装在电机-减速器输出端的大齿轮,所述大
齿轮与升降板上的齿条一配合;所述齿轮齿条机构二包括安装在电机-减速器输出端的小齿轮,所述小齿轮与齿条二配合,所述齿条二安装在齿条安装条上,所述齿条安装条通过线轨滑块组件二与底板滑动连接。
[0011]
进一步的,所述大齿轮、小齿轮同轴设置,所述大齿轮与小齿轮的齿数比为2:1;
[0012]
所述升降板垂直底板所在方向设置,所述齿条安装条相对升降板垂直设置;所述钢丝绳连接配重块后垂直向上伸展与滚轮三相切,从其后半圆绕过;垂直向前伸展与动轮相切,从其前半圆绕过;垂直向后伸展与滚轮二相切,从其后半圆绕过;垂直向上伸展与滚轮一相切,并从其前向后绕出与患者手臂连接。
[0013]
进一步的,所述线轨滑块组件二设有两个且彼此相对平行设置,两所述线轨滑块组件二分别位于动轮安装板的两端;每个所述线轨滑块组件二均包括有直线导轨和滑块,所述线轨滑块组件二中的滑块固定在底板上,所述线轨滑块组件二中的直线导轨安装在铝合金基板上;所述齿条安装条安装在其中一线轨滑块组件二上方的铝合金基板上。
[0014]
进一步的,所述底板上还垂直安装有滑块连接板,所述滑块连接板相对升降板平行设置,所述滑块连接板通过若干线轨滑块组件一与升降板滑动连接,各所述线轨滑块组件一竖直方向设置。
[0015]
进一步的,所述齿条一通过齿条座安装在升降板上。
[0016]
进一步的,所述大齿轮、小齿轮安装在转轴上,所述转轴通过联轴器与电机-减速器输出端连接。
[0017]
进一步的,所述底板上还固定有电机安装板、转轴支撑板,电机-减速器安装在电机安装板上,所述转轴安装在转轴支撑板上。
[0018]
与现有技术相比,本实用新型的有益效果在于:
[0019]
本实用新型提出的一种具备绳索自动张紧功能的伸缩运动装置,伸缩运动装置的驱动力通过齿轮齿条及滑轮组结构,实现了钢丝绳长度的自动补偿,保证了机器人在整个工作过程中钢丝绳的自动张紧,实现了电机-减速器模块至执行机构驱动关节的动力传输,解决因钢丝绳长度变化导致的传动失效问题。
附图说明
[0020]
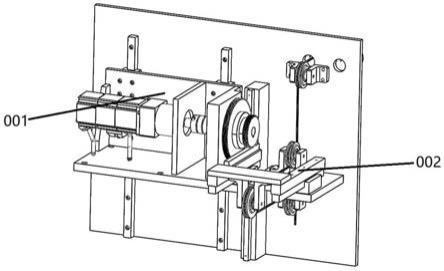
图1为本实用新型实施例所述一种具备绳索自动张紧功能的伸缩运动装置在第一位置时的结构示意图;
[0021]
图2为本实用新型实施例所述一种具备绳索自动张紧功能的伸缩运动装置在第二位置时的结构示意图;
[0022]
图3为本实用新型实施例所述伸缩运动机构在第一位置时的结构示意图;
[0023]
图4为本实用新型实施例所述钢丝绳长度补偿机构在第一位置时的结构示意图。
[0024]
图中:
[0025]
001、伸缩运动机构;101、电机-减速器;102、底板;103、电机安装板;104、联轴器; 105、转轴支撑板;106、转轴;107、线轨滑块组件一;108、滑块连接板;109、齿条座;110、齿条一;111、大齿轮;112、升降板;002、钢丝绳长度补偿机构;201、滚轮一;202、钢丝绳;203、滚轮二;204、铝合金基板;205、线轨滑块组件二;206、动轮;207、滚轮三;208、小齿轮;209、齿条二;210、齿条安装条;211、动轮安装板。
具体实施方式
[0026]
展示一下实例来具体说明本实用新型的某些实施例,且不应解释为限制本实用新型的范围。对本实用新型公开的内容可以同时从材料、方法和反应条件进行改进,所有这些改进,均应落入本实用新型的精神和范围之内。
[0027]
如图1-4所示,本申请的一种具备绳索自动张紧功能的伸缩运动装置,包括伸缩运动机构001及钢丝绳长度补偿机构002,所述伸缩运动机构001包括底板102及设于所述底板102 上的电机-减速器10所述电机-减速器101输出端安装有齿轮齿条机构一,所述齿轮齿条机构一的输出端固定在升降板112上;所述钢丝绳长度补偿机构002包括安装在电机-减速器101 输出端的齿轮齿条机构二,所述齿轮齿条机构二通过线轨滑块组件二205与底板102滑动连接,所述线轨滑块组件二205经滑轮组与升降板112连接,钢丝绳202的一端连接配重模块,所述钢丝绳202的另一端绕过所述滑轮组与患者手臂连接。
[0028]
伸缩运动机构001输出的驱动力传递给钢丝绳长度补偿机构002,用于钢丝绳202长度的自动补偿,解决机械臂升降导致钢丝绳202长度变化的问题。具体的,电机-减速器101输出动力带动输出端的齿轮齿条机构二在底板102上运动,由于齿轮齿条机构二是安装在线轨滑块组件二205上的,最终带动线轨滑块组件二205及其连接的滑轮组运动,实现对滑轮组上钢丝绳202长度的自动补偿。
[0029]
在本实施例中,所述齿轮齿条机构一包括安装在电机-减速器101输出端的大齿轮111,所述大齿轮111与升降板112上的齿条一110配合,所述齿条一110通过齿条座109安装在升降板112上,所述升降板112垂直底板102设置,所述齿条安装条210相对升降板112垂直设置;电机-减速器101驱动大齿轮11转动,大齿轮11旋转时带动齿条一110上下运动,由于齿条一110是安装在升降板112上的,最终带动升降板112上下运动;
[0030]
所述线轨滑块组件二205经动轮安装板211连接滑轮组,所述滑轮组包括动轮206、滚轮一201、滚轮二203、滚轮三207,所述动轮206固定在动轮安装板211上,所述动轮206 两侧安装有滚轮二203、滚轮三207,所述滚轮二203、滚轮三207均与底板102连接固定,所述滚轮一201安装在升降板112上,所述钢丝绳202的首端连接配重模块,所述钢丝绳202 的尾端依次绕过滚轮三207、动轮206、滚轮二203、滚轮一201后与患者手臂连接。
[0031]
当电机-减速器101带动大齿轮111逆时针转动时,升降板112向上运动(从图1到图2 位置的过程),此时小齿轮208跟大齿轮111转过相同的角度,使得齿条二209带动动轮206 向前运动,运用滑轮传动,确保升降板112运动过程中,滚轮二203、动轮206间钢丝绳202 长度变化与滚轮一201、滚轮二203间钢丝绳长度变化保持一致,从而使滚轮三207末端钢丝位置不变,实现整个装置工作过程中钢丝绳202自动张紧。
[0032]
在本实施例中,所述齿轮齿条机构二包括安装在电机-减速器101输出端的小齿轮208,所述小齿轮208与齿条二209配合,所述齿条二209安装在齿条安装条210上,所述齿条安装条210通过线轨滑块组件二205与底板102滑动连接。电机-减速器101驱动小齿轮208转动,小齿轮208转动时带动齿条二209前后运动,由于齿条二209是安装在线轨滑块组件二 205上的,带动线轨滑块组件二205及其连接的动轮安装板211、滑轮组运动,实现对滑轮组上钢丝绳长度的补偿。
[0033]
在本实施例中,所述升降板112垂直底板102所在方向设置,所述齿条安装条210相对升降板112垂直设置;所述线轨滑块组件二205设有两个且彼此相对平行设置,两所述线
轨滑块组件二205分别位于动轮安装板211的两端;每个所述线轨滑块组件二205均包括有直线导轨和滑块,所述线轨滑块组件二205中的滑块固定在底板102上,所述线轨滑块组件二 205中的直线导轨安装在铝合金基板204上;所述齿条安装条210安装在其中一线轨滑块组件二205上方的铝合金基板204上;线轨滑块组件二205在底板上前后移动带动动轮安装板 211前后移动,进而带动其上安装的动轮206移动。
[0034]
所述大齿轮111、小齿轮208同轴设置,所述大齿轮111与小齿轮208的齿数比为2:1;所述钢丝绳202连接配重块后垂直向上伸展与滚轮三207相切,从其后半圆绕过;垂直向前伸展与动轮206相切,从其前半圆绕过;垂直向后伸展与滚轮二203相切,从其后半圆绕过;垂直向上伸展与滚轮一201相切,并从其前向后绕出与患者手臂连接。电机-减速器101的驱动带动大齿轮111、小齿轮208转过相同角度,大齿轮111通过齿条一110带动升降板112 上下运动,小齿轮208通过齿条二209带动动轮206前后移动,由于大齿轮111与小齿轮208 的齿数比为2:1,使得滚轮一201向上移动的距离与动轮206向前移动的距离比为2:1;根据动滑轮的特点,动轮206移动距离与钢丝绳202变化量比为1:2,从而使得图1和图2中钢丝绳的长度保持不变,实现了钢丝绳自动张紧。
[0035]
在本实施例中,所述底板102上还垂直安装有滑块连接板108,所述滑块连接板108相对升降板112平行设置,所述滑块连接板108通过若干线轨滑块组件一107与升降板112滑动连接,各所述线轨滑块组件一107竖直方向设置。滑块连接板108及其线轨滑块组件一107 是用来约束升降板112的运动轨迹的,所述线轨滑块组件一107优选设有两个。
[0036]
在本实施例中,所述大齿轮111、小齿轮208安装在转轴106上,所述转轴106通过联轴器104与电机-减速器101输出端连接。
[0037]
在本实施例中,所述底板102上还固定有电机安装板103、转轴支撑板105,电机-减速器101安装在电机安装板103上,所述转轴106安装在转轴支撑板105上。电机安装板103、转轴支撑板105分别用来实现对电机-减速器101、转轴106的安装固定。
[0038]
综上,本申请的伸缩运动装置,通过齿轮齿条机构及滑轮组,将伸缩运动机构的驱动力用于钢丝绳长度的自动补偿,实现电机-减速器至执行机构驱动关节的动力传输,解决现有因机械臂升降导致钢丝绳长度变化的问题。
[0039]
以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1