一种多功能农业机器人的制作方法
[0001]
本实用新型属于农业机器人技术领域,具体涉及一种多功能农业机器人。
背景技术:
[0002]
当前,我国农业机械水平相对国际水平普遍较低,自动化水平尤为不足。随着国家对农业和可持续发展的重视,新能源、自动化、农业机器人成为农业农机未来发展的主流。相对于美国的规模化、日本的精细化、荷兰的智慧管理而言,我国的国情需要我国的智能农机朝着多元化的发现发展,因此需要一款集多种功能于一体的农业机器人,使农业机器人能够适用于采摘、旋耕、土壤检测、定点播种等多种工作环境。
技术实现要素:
[0003]
本实用新型的目的在于提供一种多功能农业机器人,以解决上述背景技术中提出的问题。
[0004]
为实现上述目的,本实用新型提供如下技术方案:一种多功能农业机器人,包括驱动装置、减震装置、底盘框架、保护外壳、供电装置和通讯装置,所述减震装置固定设置在所述驱动装置的上方,所述减震装置的顶部固定安装在所述底盘框架上,所述供电装置固定安装在所述底盘框架的上表面,所述供电装置的左侧设置有集成传感器,所述供电装置的右侧设置有总控制箱,所述集成传感器和所述总控制箱均固定安装在所述底盘框架上,所述总控制箱与所述集成传感器电性连接,所述保护外壳固定设置在所述底盘框体的上方,所述保护外壳的上表面安装有发射器,所述集成传感器与所述发射器电性连接,所述总控制箱的右侧设置有机械臂控制器,所述机械臂控制器固定安装在所述底盘框架上,所述底盘框架上固定设置有机械臂,所述机械臂设置在所述机械臂控制器的上方,所述保护外壳的顶部设置有顶盖,所述机械臂的一端贯穿所述顶盖设置在所述顶盖的外侧,所述总控制箱与所述机械臂控制器之间设置有录像机,所述录像机的一端通过hdmi线束电性连接有发射机,所述发射机设置在所述集成传感器的一侧,所述录像机的另一端电性连接有数传模块,且所述录像机通过网线电性连接有交换器,所述交换器设置在所述总控制箱的外侧,所述交换器通过网线电性连接有摄像头,所述摄像头安装在所述保护外壳上,所述集成传感器与所述发射机之间设置有千寻控制器,所述保护外壳上设置有天线,所述千寻控制器与所述天线电性连接。
[0005]
优选的,所述驱动装置包括车轮、轮毂电机和车轮挡板,所述车轮与所述轮毂电机传动连接,所述车轮设置在所述车轮挡板的内侧。
[0006]
优选的,所述减震装置包括减震器,所述减震器的底部固定安装在所述驱动装置的上表面,所述减震器的顶部固定安装在所述底盘框架上。
[0007]
优选的,所述供电装置包括第一蓄电池和第二蓄电池,所述第一蓄电池与所述驱动装置和所述机械臂电性连接,所述第一蓄电池的电压为48v,所述第二蓄电池分别与所述集成传感器、所述总控制箱、所述发射器、所述机械臂控制器、所述录像机、所述发射机、所
述数传模块、所述交换器、所述摄像头以及所述千寻控制器电性连接,所述第二蓄电池的电压为12v电源。
[0008]
优选的,所述通讯装置包括基站、传输线和上位机,所述通讯装置与所述发射器通讯连接。
[0009]
优选的,所述驱动装置和所述减震装置均设置有四组,四组所述驱动装置和所述减震装置对称设置在所述底盘框架的两侧。
[0010]
优选的,所述发射器设置有两组,两组所述发射器对称设置在所述保护外壳的两侧。
[0011]
优选的,所述底盘框架的一端固定设置有拖挂板,所述拖挂板上设置有定位孔。
[0012]
与现有技术相比,本实用新型的有益效果是:
[0013]
(1)本实用新型与传统的农机相比,通过采用电能清洁能源替代传统柴油能源,不仅实现了对农作物、大气环境零污染的效果,而且电能相对柴油更为便宜,大大节约使用成本,增加收益;
[0014]
(2)本实用新型与传统的农机相比,传统的农机均是集中动力驱动,本实用新型采用多组驱动装置和减震装置进行分布式驱动,降低了机器人在行驶过程中电器原件受到的震动,同时多组驱动装置的协同工作赋予了多功能农业机器人较强的爬坡和通过能力,适用于多种复杂的工作环境;
[0015]
(3)本实用新型与传统的农机相比,传统的采摘为人工操作,本实用新型通过在底盘框架上配备集成传感器、发射器、机械臂、录像机、发射机、数传模块、交换器、摄像头和千寻控制器,通过视觉识别、图像处理、算法处理、采摘动作输出等流程,实现多功能机器人的自动采摘效果;
[0016]
(4)本实用新型与传统农机相比,本实用新型采用无人驾驶操作方式,通过设置集成传感器、发射器、机械臂、录像机、发射机、数传模块、交换器、摄像头和千寻控制器,能够实现远程监控、路径规划、自主作业等功能,适用于规模化集群作业,节省人力,节约劳动力成本。
附图说明
[0017]
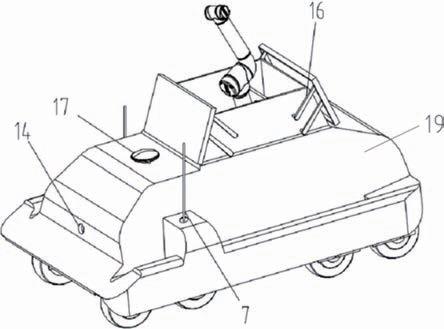
图1为本实用新型的结构示意图;
[0018]
图2为本实用新型图1除去保护外壳的结构示意图。
[0019]
图中:1、驱动装置;2、减震装置;3、底盘框架;4、供电装置;5、集成传感器;6、总控制箱;7、发射器;8、机械臂控制器;9、机械臂;10、录像机;11、发射机;12、数传模块;13、交换器;14、摄像头;15、千寻控制器;16、顶盖;17、天线;18、拖挂板;19、保护外壳。
具体实施方式
[0020]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0021]
实施例1
[0022]
请参阅图1-图2,本实用新型提供一种技术方案:一种多功能农业机器人,包括驱动装置1、减震装置2、底盘框架3、保护外壳19、供电装置4和通讯装置,减震装置2固定设置在驱动装置1的上方,减震装置2的顶部固定安装在底盘框架3上,供电装置4固定安装在底盘框架3的上表面,供电装置4的左侧设置有集成传感器5,供电装置4的右侧设置有总控制箱6,集成传感器5和总控制箱6均固定安装在底盘框架3上,总控制箱6与集成传感器5电性连接,保护外壳19固定设置在底盘框体的上方,保护外壳19的上表面安装有发射器7,集成传感器5与发射器7电性连接,总控制箱6的右侧设置有机械臂控制器8,机械臂控制器8固定安装在底盘框架3上,底盘框架3上固定设置有机械臂9,机械臂9设置在机械臂控制器8的上方,保护外壳19的顶部设置有顶盖16,机械臂9的一端贯穿顶盖16设置在顶盖16的外侧,总控制箱6与机械臂9控制器8之间设置有录像机10,录像机10的一端通过hdmi线束电性连接有发射机11,发射机11设置在集成传感器5的一侧,录像机10的另一端电性连接有数传模块12,且录像机10通过网线电性连接有交换器13,交换器13设置在总控制箱6的外侧,交换器13通过网线电性连接有摄像头14,摄像头14安装在保护外壳19上,集成传感器5与发射机11之间设置有千寻控制器15,保护外壳19上设置有天线17,千寻控制器15与天线17电性连接。
[0023]
本实施例中,优选的,驱动装置1包括车轮、轮毂电机和车轮挡板,车轮与轮毂电机传动连接,车轮设置在车轮挡板的内侧,车轮设置有两组,车轮挡板进行保证轮毂电机的前进方向。
[0024]
本实施例中,优选的,减震装置2包括减震器,减震器设置有两组,减震器的底部固定安装在驱动装置1的上表面,减震器的顶部固定安装在底盘框架3上。
[0025]
本实施例中,优选的,供电装置4包括第一蓄电池和第二蓄电池,第一蓄电池与驱动装置1和机械臂9电性连接,第一蓄电池的电压为48v,第二蓄电池分别与集成传感器5、总控制箱6、发射器7、机械臂控制器8、录像机10、发射机11、数传模块12、交换器13、摄像头14以及千寻控制器15电性连接,第二蓄电池的电压为12v电源。
[0026]
本实施例中,优选的,通讯装置包括基站、传输线和上位机,通讯装置与发射器7通讯连接。
[0027]
本实施例中,优选的,驱动装置1和减震装置2均设置有四组,四组驱动装置1和减震装置2对称设置在底盘框架3的两侧。
[0028]
本实施例中,优选的,发射器7设置有两组,两组发射器7对称设置在保护外壳19的两侧,两组发射器7能够增加信号传输效果。
[0029]
本实施例中,优选的,底盘框架3的一端固定设置有拖挂板18,拖挂板18上设置有定位孔,拖挂18和定位孔能够方便对组件进行挂接,为工作提供方便。
[0030]
实施例2
[0031]
请参阅图1-图2,本实用新型提供一种技术方案:一种多功能农业机器人,包括驱动装置1、减震装置2、底盘框架3、保护外壳19、供电装置4和通讯装置,减震装置2固定设置在驱动装置1的上方,减震装置2的顶部固定安装在底盘框架3上,供电装置4固定安装在底盘框架3的上表面,供电装置4的左侧设置有集成传感器5,供电装置4的右侧设置有总控制箱6,集成传感器5和总控制箱6均固定安装在底盘框架3上,总控制箱6与集成传感器5电性连接,保护外壳19固定设置在底盘框体的上方,保护外壳19的上表面安装有发射器7,集成传感器5与发射器7电性连接,总控制箱6的右侧设置有机械臂控制器8,机械臂控制器8固定
安装在底盘框架3上,底盘框架3上固定设置有机械臂9,机械臂9设置在机械臂控制器8的上方,保护外壳19的顶部设置有顶盖16,机械臂9的一端贯穿顶盖16设置在顶盖16的外侧,总控制箱6与机械臂9控制器8之间设置有录像机10,录像机10的一端通过hdmi线束电性连接有发射机11,发射机11设置在集成传感器5的一侧,录像机10的另一端电性连接有数传模块12,且录像机10通过网线电性连接有交换器13,交换器13设置在总控制箱6的外侧,交换器13通过网线电性连接有摄像头14,摄像头14安装在保护外壳19上,集成传感器5与发射机11之间设置有千寻控制器15,保护外壳19上设置有天线17,千寻控制器15与天线17电性连接。
[0032]
本实施例中,优选的,驱动装置1包括车轮、轮毂电机和车轮挡板,车轮与轮毂电机传动连接,车轮设置在车轮挡板的内侧,车轮设置有两组,车轮挡板进行保证轮毂电机的前进方向。
[0033]
本实施例中,优选的,减震装置2包括减震器,减震器设置有两组,减震器的底部固定安装在驱动装置1的上表面,减震器的顶部固定安装在底盘框架3上。
[0034]
本实施例中,优选的,供电装置4包括第一蓄电池和第二蓄电池,第一蓄电池与驱动装置1和机械臂9电性连接,第一蓄电池的电压为48v,第二蓄电池分别与集成传感器5、总控制箱6、发射器7、机械臂控制器8、录像机10、发射机11、数传模块12、交换器13、摄像头14以及千寻控制器15电性连接,第二蓄电池的电压为12v电源。
[0035]
本实施例中,优选的,驱动装置1和减震装置2均设置有四组,四组驱动装置1和减震装置2对称设置在底盘框架3的两侧。
[0036]
本实施例中,优选的,发射器7设置有两组,两组发射器7对称设置在保护外壳19的两侧,两组发射器7能够增加信号传输效果。
[0037]
本实用新型的使用及优点:本实用新型与传统的农机相比,通过采用电能清洁能源替代传统柴油能源,不仅实现了对农作物、大气环境零污染的效果,而且电能相对柴油更为便宜,大大节约使用成本,增加收益;传统的农机均是集中动力驱动,本实用新型采用多组驱动装置1和减震装置2进行分布式驱动,降低了机器人在行驶过程中电器原件受到的震动,同时多组驱动装置1的协同工作赋予了多功能农业机器人较强的爬坡和通过能力,适用于多种复杂的工作环境;传统的采摘为人工操作,本实用新型通过在底盘框架3上配备集成传感器5、发射器7、机械臂9、录像机10、发射机11、数传模块12、交换器13、摄像头14和千寻控制器15,通过视觉识别、图像处理、算法处理、采摘动作输出等流程,实现多功能机器人的自动采摘效果;本实用新型采用无人驾驶操作方式,通过设置集成传感器5、发射器7、机械臂9、录像机10、发射机11、数传模块12、交换器13、摄像头14和千寻控制器15,能够实现远程监控、路径规划、自主作业等功能,适用于规模化集群作业,节省人力,节约劳动力成本。
[0038]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1