一种六自由度并联机构
1.本实用新型涉及机器人领域,特别涉及一种六自由度并联机构。
背景技术:
2.并联机构是一种定平台通过至少两个独立的运动链相连接驱动动平台的机构,该机构有两个或两个以上自由度,且以并联方式驱动机构,具有精度高、结构紧凑、刚度高,承载能力大等优点。广泛应用于并联机床、运动模拟器、抓取机器人等方面。但目前大多数并联机构分支不含闭环机构,对于自由度大于支链数的并联机构,有些支链必须设置两个或两个以上的原动件,需将电机安装在支链关节处,导致机构刚性差、惯量大、累计误差大等问题,机构动力学性能较差,控制困难。
技术实现要素:
3.本实用新型的目的是针对上述现有技术存在的缺陷,提供一种六自由度并联机构,解决传统自由度数大于支链数的并联机构刚性差、惯量大、关节累计误差大等问题。
4.本实用新型为实现上述目的采用的技术方案是:一种六自由度并联机构,包括定平台、动平台、第一支链、第二支链、第三支链、第四支链、第五支链、第六支链,定平台上表面设有六个连接端分别是定平台连接端ⅰ、定平台连接端ⅱ、定平台连接端ⅲ、定平台连接端ⅳ、定平台连接端
ⅴ
、定平台连接端
ⅵ
,动平台底面设有六个连接端分别是动平台连接端ⅰ、动平台连接端ⅱ、动平台连接端ⅲ、动平台连接端ⅳ、动平台连接端
ⅴ
、动平台连接端
ⅵ
,定平台的六个连接端位置分别与动平台的六个连接端位置相互一一对应,第一支链连接在定平台连接端ⅰ与动平台连接端ⅰ之间,第二支链连接在定平台连接端ⅱ与动平台连接端ⅱ之间,第三支链连接在定平台连接端ⅲ与动平台连接端ⅲ之间,第四支链连接在定平台连接端ⅳ与动平台连接端ⅳ之间,第五支链连接在定平台连接端
ⅴ
与动平台连接端
ⅴ
之间,第六支链连接在定平台连接端
ⅵ
与动平台连接端
ⅵ
之间。
5.本实用新型的进一步技术方案是:所述定平台和动平台分别为正六边形状,定平台的六个连接端分别设置在定平台六条边靠中部位置,动平台的六个连接端也分别设置在动平台六条边靠中部位置。
6.本实用新型的进一步技术方案是:所述第一支链包括第一电机、第一主动杆、第一连杆、第二连杆、第三连杆,第一主动杆中部通过转动副与定平台连接端ⅰ连接,第一电机安装在定平台连接端ⅰ一侧并可驱动第一主动杆转动,第一主动杆一端通过球副与第一连杆下端连接,第一主动杆另一端通过球副与第三连杆下端连接,第一连杆上端通过转动副与第二连杆一端连接,第二连杆另一端通过转动副与第三连杆上端连接, 第二连杆中部通过球副与动平台连接端ⅰ连接。
7.本实用新型的进一步技术方案是:所述第二支链包括第二电机、第二主动杆、第四连杆、第五连杆、第六连杆,第二主动杆中部通过转动副与定平台连接端ⅱ连接,第二电机安装在定平台连接端ⅱ一侧并可驱动第二主动杆转动,第二主动杆一端通过球副与第四连
杆下端连接,第二主动杆另一端通过球副与第六连杆下端连接,第四连杆上端通过转动副与第五连杆一端连接,第五连杆另一端通过转动副与第六连杆上端连接, 第五连杆中部通过球副与动平台连接端ⅱ连接。
8.本实用新型的进一步技术方案是:所述第三支链包括第三电机、第三主动杆、第七连杆、第八连杆、第九连杆,第三主动杆中部通过转动副与定平台连接端ⅲ连接,第三电机安装在定平台连接端ⅲ一侧并可驱动第三主动杆转动,第三主动杆一端通过球副与第七连杆下端连接,第三主动杆另一端通过球副与第九连杆下端连接,第七连杆上端通过转动副与第八连杆一端连接,第八连杆另一端通过转动副与第九连杆上端连接, 第八连杆中部通过球副与动平台连接端ⅲ连接。
9.本实用新型的进一步技术方案是:所述第四支链包括第四电机、第四主动杆、第十连杆、第十一连杆、第十二连杆,第四主动杆中部通过转动副与定平台连接端ⅳ连接,第四电机安装在定平台连接端ⅳ一侧并可驱动第四主动杆转动,第四主动杆一端通过球副与第十连杆下端连接,第四主动杆另一端通过球副与第十二连杆下端连接,第十连杆上端通过转动副与第十一连杆一端连接,第十一连杆另一端通过转动副与第十二连杆上端连接, 第十一连杆中部通过球副与动平台连接端ⅳ连接。
10.本实用新型的进一步技术方案是:所述第五支链包括第五电机、第五主动杆、第十三连杆、第十四连杆、第十五连杆,第五主动杆中部通过转动副与定平台连接端
ⅴ
连接,第五电机安装在定平台连接端
ⅴ
一侧并可驱动第五主动杆转动,第五主动杆一端通过球副与第十三连杆下端连接,第五主动杆另一端通过球副与第十五连杆下端连接,第十三连杆上端通过转动副与第十四连杆一端连接,第十四连杆另一端通过转动副与第十五连杆上端连接, 第十四连杆中部通过球副与动平台连接端
ⅴ
连接。
11.本实用新型的进一步技术方案是:所述第六支链包括第六电机、第六主动杆、第十六连杆、第十七连杆、第十八连杆,第六主动杆中部通过转动副与定平台连接端
ⅵ
连接,第六电机安装在定平台连接端
ⅵ
一侧并可驱动第六主动杆转动,第六主动杆一端通过球副与第十六连杆下端连接,第六主动杆另一端通过球副与第十八连杆下端连接,第十六连杆上端通过转动副与第十七连杆一端连接,第十七连杆另一端通过转动副与第十八连杆上端连接, 第十七连杆中部通过球副与动平台连接端
ⅵ
连接。
12.本实用新型六自由度并联机构具有如下有益效果:本实用新型通过六个支链共同控制动平台六自由度输出运动,动平台运动平衡,控制方便,电机安装在定平台上,整机转动惯量小,机构刚性好,动力学性能好,动平台可实现六自由度运动输出。
13.下面结合附图和实施例对本实用新型六自由度并联机构作进一步的说明。
附图说明
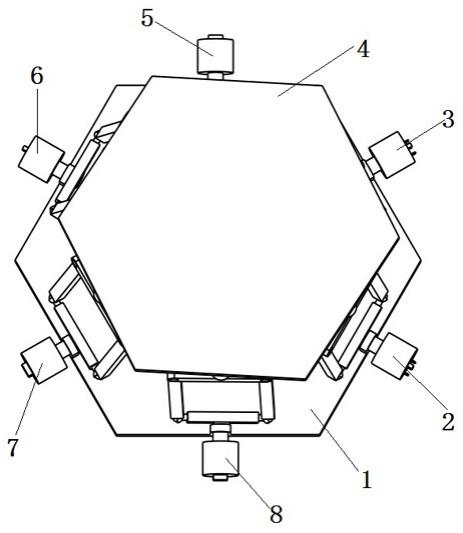
14.图1是本实用新型六自由度并联机构的结构示意图;
15.图2是图1所示六自由度并联机构的另一方向视图;
16.图3是图1所示六自由度并联机构的又一方向视图;
17.附图标号说明:1
‑
定平台,2
‑
第三电机,3
‑
第一电机,4
‑
动平台,5
‑
第二电机,6
‑
第四电机,7
‑
第五电机,8
‑
第六电机,9
‑
第一连杆,10
‑
第一主动杆,11
‑
定平台连接端ⅰ,12
‑
第三连杆,13
‑
定平台连接端ⅱ,14
‑
第二主动杆,15
‑
第六连杆,16
‑
第四连杆,17
‑
第五连杆,
18
‑
动平台连接端ⅱ,19
‑
第二连杆,20
‑
动平台连接端ⅰ, 22
‑
动平台连接端ⅲ,23
‑
第八连杆,24
‑
第九连杆,25
‑
第七连杆,26
‑
第三主动杆,27
‑
定平台连接端ⅲ,28
‑
第十三连杆,29
‑
定平台连接端
ⅴ
,30
‑
第五主动杆,31
‑
第十五连杆,32
‑
定平台连接端
ⅵ
,33
‑
第六主动杆,34
‑
第十八连杆,35
‑
第十六连杆,36
‑
第十七连杆,37
‑
动平台连接端
ⅵ
,38
‑
动平台连接端
ⅴ
,39
‑
第十四连杆,40
‑
动平台连接端ⅳ,41
‑
第十一连杆,42
‑
第十连杆,43
‑
第十二连杆,44
‑
第四主动杆,45
‑
定平台连接端ⅳ。
具体实施方式
18.如图1至图3所示,本实用新型六自由度并联机构,包括定平台、动平台、第一支链、第二支链、第三支链、第四支链、第五支链、第六支链。定平台上表面设有六个连接端分别是定平台连接端ⅰ、定平台连接端ⅱ、定平台连接端ⅲ、定平台连接端ⅳ、定平台连接端
ⅴ
、定平台连接端
ⅵ
。动平台底面设有六个连接端分别是动平台连接端ⅰ、动平台连接端ⅱ、动平台连接端ⅲ、动平台连接端ⅳ、动平台连接端
ⅴ
、动平台连接端
ⅵ
。定平台的六个连接端位置分别与动平台的六个连接端位置相互一一对应。第一支链连接在定平台连接端ⅰ与动平台连接端ⅰ之间,第二支链连接在定平台连接端ⅱ与动平台连接端ⅱ之间,第三支链连接在定平台连接端ⅲ与动平台连接端ⅲ之间,第四支链连接在定平台连接端ⅳ与动平台连接端ⅳ之间,第五支链连接在定平台连接端
ⅴ
与动平台连接端
ⅴ
之间,第六支链连接在定平台连接端
ⅵ
与动平台连接端
ⅵ
之间。
19.在本实施例中,所述定平台和动平台分别为正六边形状,定平台的六个连接端分别设置在正六边形定平台的六条边靠中部位置,动平台的六个连接端也分别设置在正六边形动平台的六条边靠中部位置。
20.如图2所示,所述第一支链包括第一电机、第一主动杆、第一连杆、第二连杆、第三连杆。第一主动杆中部通过转动副与定平台连接端ⅰ连接,第一电机安装在定平台连接端ⅰ一侧并可驱动第一主动杆转动,第一主动杆一端通过球副与第一连杆下端连接,第一主动杆另一端通过球副与第三连杆下端连接,第一连杆上端通过转动副与第二连杆一端连接,第二连杆另一端通过转动副与第三连杆上端连接, 第二连杆中部通过球副与动平台连接端ⅰ连接。
21.如图2所示,所述第二支链包括第二电机、第二主动杆、第四连杆、第五连杆、第六连杆,第二主动杆中部通过转动副与定平台连接端ⅱ连接,第二电机安装在定平台连接端ⅱ一侧并可驱动第二主动杆转动,第二主动杆一端通过球副与第四连杆下端连接,第二主动杆另一端通过球副与第六连杆下端连接,第四连杆上端通过转动副与第五连杆一端连接,第五连杆另一端通过转动副与第六连杆上端连接, 第五连杆中部通过球副与动平台连接端ⅱ连接。
22.如图2所示,所述第三支链包括第三电机、第三主动杆、第七连杆、第八连杆、第九连杆,第三主动杆中部通过转动副与定平台连接端ⅲ连接,第三电机安装在定平台连接端ⅲ一侧并可驱动第三主动杆转动,第三主动杆一端通过球副与第七连杆下端连接,第三主动杆另一端通过球副与第九连杆下端连接,第七连杆上端通过转动副与第八连杆一端连接,第八连杆另一端通过转动副与第九连杆上端连接, 第八连杆中部通过球副与动平台连接端ⅲ连接。
23.如图3所示,所述第四支链包括第四电机、第四主动杆、第十连杆、第十一连杆、第十二连杆,第四主动杆中部通过转动副与定平台连接端ⅳ连接,第四电机安装在定平台连接端ⅳ一侧并可驱动第四主动杆转动,第四主动杆一端通过球副与第十连杆下端连接,第四主动杆另一端通过球副与第十二连杆下端连接,第十连杆上端通过转动副与第十一连杆一端连接,第十一连杆另一端通过转动副与第十二连杆上端连接, 第十一连杆中部通过球副与动平台连接端ⅳ连接。
24.如图3所示,所述第五支链包括第五电机、第五主动杆、第十三连杆、第十四连杆、第十五连杆,第五主动杆中部通过转动副与定平台连接端
ⅴ
连接,第五电机安装在定平台连接端
ⅴ
一侧并可驱动第五主动杆转动,第五主动杆一端通过球副与第十三连杆下端连接,第五主动杆另一端通过球副与第十五连杆下端连接,第十三连杆上端通过转动副与第十四连杆一端连接,第十四连杆另一端通过转动副与第十五连杆上端连接, 第十四连杆中部通过球副与动平台连接端
ⅴ
连接。
25.如图3所示,所述第六支链包括第六电机、第六主动杆、第十六连杆、第十七连杆、第十八连杆,第六主动杆中部通过转动副与定平台连接端
ⅵ
连接,第六电机安装在定平台连接端
ⅵ
一侧并可驱动第六主动杆转动,第六主动杆一端通过球副与第十六连杆下端连接,第六主动杆另一端通过球副与第十八连杆下端连接,第十六连杆上端通过转动副与第十七连杆一端连接,第十七连杆另一端通过转动副与第十八连杆上端连接, 第十七连杆中部通过球副与动平台连接端
ⅵ
连接。
26.本实用新型通过对称的第一支链、第二支链、第三支链、第四支链、第五支链、第六支链共同控制动平台六自由度输出运动。控制方便,电机安装在定平台上,整机转动惯量小,机构刚性好,动力学性能好。六自由度并联机构的动平台可实现六自由度运动输出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1