用于在自动系统中提供高流量真空采集的系统和方法与流程
用于在自动系统中提供高流量真空采集的系统和方法
1.本技术是申请日为2016年9月8日、申请号为201680065068.5(国际申请号为pct/us2016/050788)、发明创造名称为“用于在自动系统中提供高流量真空采集的系统和方法”的专利申请的分案申请。
2.优先权
3.本技术要求2015年9月8日提交的美国临时专利申请序列号第62/215,489以及2015年12月2日提交的美国临时专利申请序列号第62/262,136号的优先权,该申请的内容通过参考全部纳入本文。
技术领域
4.本发明总地涉及机器人和其他分拣系统,且特别涉及机器人系统,机器人系统具有枢转臂,枢转臂具有采用真空压力来接合环境中的物体的端部操纵装置。
背景技术:
5.大多数真空抓持件采用远低于50%大气压力的真空压力,在本文中被称作高真空。用于高真空抓持件的典型源是文丘里喷射器,文丘里喷射器产生高真空度但具有低的最大空气流量。由于低流量,必要的是获得真空抓持件与物件之间的良好密封,且同样重要的是,使待排空的体积最小化。
6.喷射器和相关系统部件的供应商包括马萨诸塞州梅德韦的韦肯公司股份有限公司(vaccon company,inc.)、纽约州的费斯托美国纽约哈帕克公司、北卡罗来纳州罗利的施迈茨股份有限公司(schmalz,inc.)和其他供应商。在不可能实现良好密封的一些示例中,一些系统使用高流量装置。典型的高流量装置是气流倍增器和鼓风机,它们产生期望的流量,但不能产生高真空源的高真空度。高流量源包括由伊利诺伊州昆西的丹佛加德纳的埃尔默里其乐股份有限公司(elmo rietschle of gardner,denver,inc.)、新泽西州爱迪生的美国富士电机公司和北卡罗来纳州罗利的施迈茨股份有限公司供应的侧风道鼓风机。还可能使用由密苏里州芬顿的edco usa(埃德科美国)和俄亥俄州辛辛那提的超空气公司(exair corporation)供应的空气倍增器。多阶段喷射器还已知用于更快地排空大体积,其中,每个阶段提供更高程度的流量但更低程度的真空度。
7.尽管有各种真空系统,但仍需要一种在机器人或其他分类系统中能够适应各种应用的端部操纵装置,各种应用涉及接合各种类型物品。还需要一种能够提供高流量且能够操纵各种物件重量的端部操纵装置。
技术实现要素:
8.根据实施例,本发明提供了一种向枢转臂的端部操纵装置提供高流量真空控制的系统。该系统包括高流量真空源和载荷检测系统,高流量真空源在端部操纵装置处提供具有高流量真空区域的开口,使得物件可被接合,同时允许大量空气流通过开口,载荷检测系统用于表征物件所呈现的载荷。
9.根据另一实施例,本发明提供了一种物件获取系统,该物件获取系统包括高流量真空源和载荷评定系统,高流量真空源提供具有高流量真空区域的开口,使得物件可被接合,同时允许大量空气流通过开口,载荷评定系统响应于流量和载荷重量或载荷平衡中的任一者来评定载荷。
10.根据其他实施例,本发明提供了一种表征高流量真空系统中端部操纵装置处的物件所呈现的载荷的方法。该方法包括以下步骤:在端部操纵装置处的开口处提供高流量真空、在开口处接合物件同时允许大量空气流量通过开口、以及表征由物件所呈现的载荷。
附图说明
11.参考附图可进一步理解以下的描述,附图中:
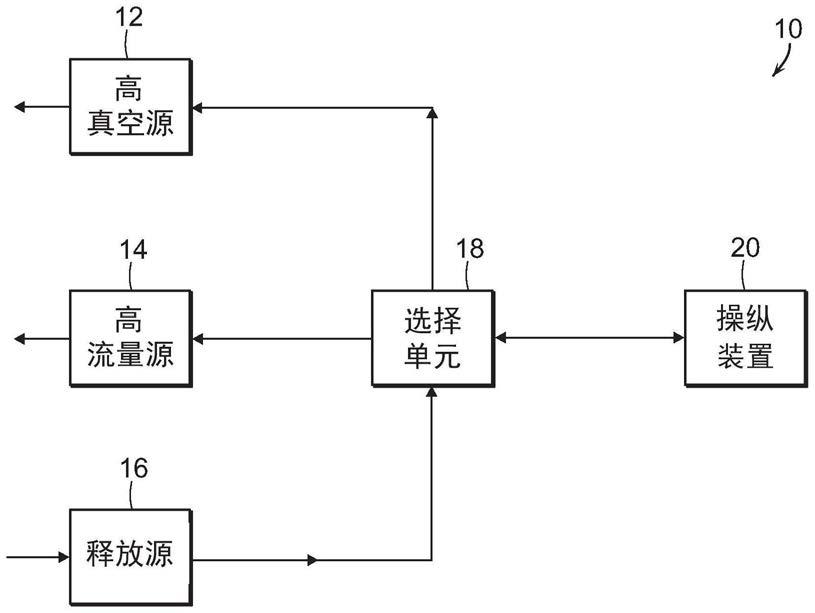
12.图1示出了根据本发明的实施例的系统的示意性框图;
13.图2示出了图1中系统的示例的示意图;
14.图3a和3b示出了接合不同类型物件的本发明的实施例的系统的端部操纵装置的示意图;
15.图4示出了检测系统以及本发明的实施例的系统的端部操纵装置的示意图;
16.图5a和5b示出了用于本发明的实施例的系统中的端部操纵装置覆盖件的影像图;
17.图6示出了接合物件的本发明的实施例的端部操纵装置的示意图;
18.图7a-7d示出了用于本发明的其他实施例的系统中端部操纵装置的其他覆盖件的示意图;
19.图8a和8b示出了接合相对较轻物件的本发明的实施例的系统中的端部操纵装置的示意图;
20.图9a和9b示出了接合相对较重物件的本发明的实施例的系统中的端部操纵装置的示意图;
21.图10a和10b示出了接合具有不平衡载荷的物件的本发明的实施例的系统中的端部操纵装置的示意图;
22.图11示出了对于不同真空源的空气流量与压差关系的示意性曲线图;
23.图12示出了对于不同性能参数的空气流量与压差关系的示意性曲线图;
24.图13示出了根据本发明的实施例的系统中的端部操纵装置和物件的示意性模型;
25.图14示出了图13中系统的示意性端视图,示出了开口的相关区域;
26.图15示出了图13中系统的示意性侧视图,示出了流动方向和压力;
27.图16示出了根据本发明的实施例的系统中从基座的抓持件偏置与角度关系的示意图;以及
28.图17示出了被保持在图16中的偏置点处的物件的示意图。
29.附图所示仅用于说明性目的而不用于测量。
具体实施方式
30.对于能操纵在尺寸、重量和表面特性方面不同的各种物件的新抓持系统存在许多应用。根据特定实施例,本发明提供了一种向枢转臂的端部操纵装置提供高流量真空控制的系统。根据各种实施例,本发明提供了一种动态高流量抓持系统,且能可选地包括用于根
据应用在高流量源与高真空源之间选择的机构。本发明的高流量真空系统因而能可选地用于高真空源。
31.该系统例如可包括用于提供具有第一最大空气流速的第一真空压力的第一真空源;以及用于提供具有第二最大空气流速的第二真空压力的第二真空源,其中,第二真空压力高于第一真空压力,且其中,第二最大空气流速大于第一最大空气流速。流速被描述为最大空气流速是因为,当物件在端部操纵装置处被接合时,流速可显著下降。高流量源可与高真空源一起使用,或用作单个源。
32.例如,图1示出了根据本发明的实施例的系统10,其中,设置有分别联接至选择单元18的可选的高真空源12以及高流量源14和释放源16,选择单元18联接至端部操纵装置20。选择单元18在高真空源12、高流量源14与释放源16之间选择,用于将高真空、具有高流量的真空或释放流量提供至端部操纵装置。图1因而示出了本发明的一般形式,包括用于产生高真空和高流量的机构、通过排气口提供大气压力或通过压缩机或储器提供高压(排气)的释放源、以及用于选择最佳地适于本情形的源的机构。
33.特别地,图2示出了根据本发明的实施例的系统包括压缩机30,压缩机30联接至喷射器32,以提供联接至电磁阀34的高真空源。鼓风机36通过止回阀38也联接至电磁阀34,且鼓风机36提供具有高最大流速的真空源。排气孔或排气源也设置至电磁阀34,电磁阀34的输出提供至端部操纵装置40。因而,该系统设置喷射器32作为高真空源,再生鼓风机(漩涡风机)36作为高流量源,止回阀38作为被动选择机构,以及电磁阀34将操纵装置连接至释放源或排气口或排气部。
34.由喷射器32提供的真空压力例如可为低于大气压力至少约90000帕,且由鼓风机36提供的真空压力在一些示例中可仅低于大气压力不超过约25000帕,而在其他示例中不超过约50000帕。因而,由鼓风机36提供的真空压力高于由喷射器32提供的真空压力。例如,喷射器的最大空气流速可不超过约5立方英尺每分钟(例如,1-2立方英尺每分钟),且鼓风机的最大空气流速例如可为至少约100立方英尺每分钟(例如,130-140立方英尺每分钟)。
35.例如,参考图3a,如果在端部操纵装置60(例如可为管状或圆锥形波纹管)与枢转臂64上的物件62之间形成良好密封,则真空压力可保持高真空和低流量。这将设置成,将通过高真空和较低的最大空气流速保持对物件62的抓持。参考图3b,如果在端部操纵装置70与枢转臂74上的不规则成形的物件72之间不形成良好密封,则高流量源将主导,从而保持高流量并通过较高的最大空气流速保持对物件72的抓持。
36.参考图4,根据其他实施例,该系统可包括附连有端部操纵装置82的枢转臂80,端部操纵装置82同样可为管状或圆锥形波纹管。端部操纵装置82还包括传感器84,传感器84包括波纹管上的附连带86,以及附连至磁场传感器84的托架88,且磁铁92安装在枢转臂80上。波纹管可沿三个方向中的任一方向运动,例如,如a处图示的朝向并远离枢转臂,如b处所示的沿横向于方向a的方向,以及如c处所示的部分横向于方向a的方向。磁场传感器84可与控制器90(例如无线地)通信,控制器90还可与流量监测器94通信,以确定对物件的高流量抓持是否足够用于如以下进一步论述的持续的抓持和运输。例如,在一实施例中,如果空气流量不足以承载载荷,系统可使物件返回,或可增加空气流量以安全地保持载荷。
37.在低真空/高流量使用期间,可使用专用的端部操纵装置,专用的端部操纵装置提供对窄长物件的改善的抓持。设计用于高流量用途以获取并保持物件的特定抓持件一般需
要大孔,以便获得足够高以用于物件获取的空气流速。在特定应用中一些这种抓持件的一个缺陷在于,待获取的物件可能是小的,没有小到其每个尺寸都小于高流量开口,但足够小到物件的特定尺寸小于开口。例如,诸如钢笔、铅笔之类的窄长物件不充分地堵塞高流量开口,以产生充足的负力来稳固地保持物件。
38.因而,根据实施例,本发明提供了一种用于高流量真空抓持件的专用覆盖件。特别地且如图5a(面向枢转臂的侧面)和5b(面向物件的侧面)中所示,这种覆盖件100可包括不允许空气流过其材料的近侧背侧面102和由泡沫材料形成的用于接合物件的远侧前侧面104。在该示例中,呈星形或星号形的裂缝开口106贯穿材料设置。在使用期间,细长物件可沿相反的狭槽开口被接纳并由泡沫材料保持。
39.例如,图6示出了被保持在联接至端部操纵装置82的覆盖件100的泡沫材料104上的细长物件96。尽管细长物件96覆盖由狭槽106提供的一些开口,但由狭槽106提供开口的其他部分108保持敞开。切入材料中的图案允许足够的区域仍获得相对较高的流量,同时为狭长物件提供许多位置或(定向)以堵挡足够高百分比的空气流量并因而被足够高百分比的空气流量保持。
40.表面104上的柔顺泡沫接触待获取的物件,从而向抓持件提供一些顺应性,同时还作用成在随着泡沫被压缩且高流量真空被施加而围绕物件密封孔。因而,孔覆盖件允许高流量抓持件通过易于附连的覆盖件有效地拾取窄长物件,易于附连的覆盖件可在实时运行期间被保持在工具变换器中且自主地添加或从抓持件移除。
41.根据各种实施例,覆盖件100可通过工人被施加至端部操纵装置成为在端部操纵装置的端部上摩擦装配,或在特定实施例中,覆盖件可设置在可获得的端部操纵装置附连件套组中,枢转臂可被编程,以例如使用将端部操作装置附连件稳固而用于从枢转臂释放的强制正空气压力和/或抓持装置,根据需要接合且当结束时断开该端部操纵装置附连件套组。
42.因而,本发明提供了一种向枢转臂的端部操纵装置提供真空控制的系统,其中,该系统包括用于以一流速向端部操纵装置提供真空压力的真空源,且端部操纵装置包括覆盖件,覆盖件包括覆盖件的近侧上的空气流阻挡材料和在覆盖件的远侧上用于接触待抓持的物件的顺应性材料。覆盖件可包括开口,开口的半径从覆盖件的中心显著变化,且开口可包括从开口的中心径向延伸的指部开口。开口可为大致星形或星号形。覆盖件可由顺应性材料形成且包括覆盖件的远侧上的顺应性泡沫,接合待抓持的物件,且覆盖件可包括覆盖件的近侧上的空气流阻挡材料。真空压力可低于大气压力不超过约25000帕或50000帕,且空气流速可为至少约100立方英尺每分钟。
43.在图7a-7d中示出了具有其他类型开口的覆盖件。例如,图7a示出了包括狭槽开口122的覆盖件120。图7b示出了包括不同尺寸的正方形开口132、134的覆盖件130。图7c中所示的覆盖件140包括小圆形开口142,且图7d中所示的覆盖件150包括不同形状的开口152和154。在每个覆盖件100、120、130、140和150中,顺应性泡沫表面可面对待获取的物件,且覆盖件的更多区域设置成相对于每个覆盖件的外周更接近覆盖件的中心敞开。例如,在覆盖件100中,星号形的中心敞开得最多。在覆盖件120中,较大的狭槽设置在中心中。在覆盖件130中,较大的正方形开口设置在中心中。在覆盖件140中,圆形开口的更大的集中度设置在中心中,且在覆盖件150中,较大的形状154设置在中心中。
44.根据本发明的特定实施例的系统能够监测端部操纵装置内的流量以及被抓持的物件的重量和平衡。图8a和8b示出了被端部操纵装置82从表面162提升的物件160,端部操纵装置82包括图4中的载荷检测装置。如图8a中所示,在接合物件160时,系统记录检测装置的位置和端部操纵装置内的流量等级(f1)以及真空压力(p1)和载荷(w1)。一旦物件160被提升(图8b),系统记录流量的变化(δf1)。在该示例中,由物件160提供的载荷相对较轻(δw1),且流量的小变化(δf1)(当考虑载荷和孔尺寸时)可被接受。然而,图9a和9b示出了端部操纵装置提升重物件。
45.图9a和9b示出了被端部操纵装置82从表面172提升的物件170,端部操纵装置82包括图4中的载荷检测装置。如图9a中所示,在接合物件170时,系统记录检测装置的位置和端部操纵装置内的流量等级(f2)以及真空压力(p2)和载荷(w2)。一旦物件170被提升(图9b),系统记录流量的变化(δf2)。如上所述,在该示例中,物件170较重,从而具有较高的载荷(δw2)。系统将结合流量(f2)和压力(p2)以及流量变化(δf2)和压力变化(δp2)来评估载荷,以评定对物件的抓持。系统可对于定尺寸的孔开口使用流量值和载荷值查找表,和/或可使用机器学习来创建并维护关于适于不同的孔尺寸和流速的载荷的信息。在其他实施例中,系统可对于如由孔开口尺寸所调整的最大流量和最大压力采用真空源的线性性能曲线。
46.系统还可检测载荷是否未被充分平衡。图10a和10b示出了被端部操纵装置82从表面182提升的物件180,端部操纵装置82包括图4中的载荷检测装置。如图10a中所示,在接合物件180时,系统记录检测装置的位置和端部操纵装置内的流量等级(f3)以及真空压力(p3)和载荷(w3)。一旦物件180被提升(图10b),系统记录流量的变化(δf3)。在该实施例中,物件180具有非平衡载荷。系统将结合流量(f3)和压力(p3)以及流量变化(δf3)和压力变化(δp2)来评估载荷,以评定对物件的抓持。同样,系统可对于定尺寸的孔开口使用流量值和载荷值查找表,和/或可使用机器学习来创建并维护关于适于不同的孔尺寸和流速的载荷的信息。在其他实施例中,系统可对于如由孔开口尺寸所调整的最大流量和最大压力采用真空源的线性性能曲线。
47.提升力的特征可在于使用任何机器学习、大数据分析、模糊逻辑或线性逼近中任一种的函数。提升力取决于真空发生器性能模型和开口内物件的面积。软管长度和摩擦也是重要的。在高流量下,压力损耗涉及流动速度。压力损耗涉及软管长度和软管摩擦。在没有性能曲线的情形中,可使用对真空发生器性能的线性逼近。
48.图11示出了鼓风机(200处)和车间吸尘器(202处)的线性性能曲线。根据参数ds,性能曲线也可为凹或凸的。术语ds使得关系曲线是否为凹或凸参数化。凹度或凸度影响高流量抓持性能。图12示出了ds=0.25(如220处所示)、ds=1(如222处所示)、ds=1.5(如224处所示)的真空性能曲线。
49.出于示意性目的,图13-15示出了高流量抓持件的示例的双管模型。如图13中所示,端部操纵装置250接合物件252。图14示出了开口的面积a1被物件部分地堵挡,留下的物件两侧上的开口具有总面积a2。被堵挡的面积被示出为(a
1-a2)。图16在260处示出了对于使用波纹管吸盘的物件的偏转角与侧向偏置的关系。可对于给定最大流量和最大压力提供优化的孔以及(a1–
a2)/a1。此外,已知被保持的物件相对于抓持件的质心以及物件的任何转动,可确定转矩。
50.如图16中所示,偏转角范围与抓持件从基座的偏置的关联,示出沿一个方向的偏置(如图16中的262和图17中的282处所示)、平衡的载荷(如图16中的270和图17中的290处所示)、以及沿相反方向的偏置(如图16中的276和图17中的296处所示)。剩余的点264、266、268、272和274对应于图17中的图像284、286、288、292和294。
51.因而,在各种实施例中,本发明设置成:载荷重量、载荷平衡和流量可用于高流量系统中,以提供在分拣系统中对物件的精确获取和运输。
52.本领域技术人员会意识到,可对以上公开的实施例作出多种修改和变型而不脱离本发明的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1