变电站巡检机器人的防碰撞装置的制作方法
1.本发明涉及变电站巡检装置技术领域,具体为变电站巡检机器人的防碰撞装置。
背景技术:
2.变电站的巡视检查就是通过定期巡视观察设备的外观有无异状,如颜色有无变化,有无杂物,表针指示是否正常,设备的声音是否正常,有无异常的气味,触及允许接触的设备温度是否正常,测量电气设备的运行参数在运行中的变化等,以判断设备的运行状况是否正常。变电站的巡视检查制度是确保设备正常安全运行的有效措施。通过定期的巡视检查了解设备运行状况,掌握运行异常,并及时地采取相应措施,对于降低事故的发生及其影响范围具有重要意义。
3.如今变电站的巡视检查通常由变电站巡检机器人来完成,巡检机器人在巡检过程中容易发生碰撞,容易对机器人造成损坏,但是,现有的机器人在发生碰撞之后,驱动系统还会继续工作,使机器人继续前进,从而导致了机器人的受损情况更加严重的问题。
4.为此,提出变电站巡检机器人的防碰撞装置。
技术实现要素:
5.本发明的目的在于提供变电站巡检机器人的防碰撞装置,通过升降杆下移时,会带动固定板下移,固定板会在挤压作用下升高,从而实现将机器人前轮抬离地面,使前轮属于悬空状态,进而降低的机器人在发生碰撞之后,驱动系统还会继续工作,使机器人继续前进,从而导致了机器人的受损情况更加严重的问题,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:变电站巡检机器人的防碰撞装置,包括连接板,所述连接板上开设有连接孔,所述连接板的一侧外壁固定连接有盒体,所述盒体上设置有防碰撞结构;
7.所述防碰撞结构包括有滑杆一,所述滑杆一的外壁与盒体的一侧内壁滑动连接,所述滑杆一的一端固定连接有防碰撞板,所述防碰撞板和盒体的一侧外壁且位于滑杆一的外部固定连接有弹簧一,所述滑杆一的一端且位于盒体的内部固定连接有限位杆,所述限位杆远离滑杆一的一端固定连接有滑块一,所述盒体的底部滑动连接有升降杆,所述升降杆的顶端固定连接有滑块二,所述滑块二的底部外壁与盒体的内壁底部之间且位于升降杆的外部固定连接有弹簧二,所述升降杆的底端且位于盒体的下方固定连接有固定板,所述滑块一的斜面和滑块二的斜面滑动连接。
8.优选的,所述盒体的内壁设置有警报结构。
9.优选的,所述警报结构包括有连接块,所述连接块的一侧外壁与滑块二的一侧外壁固定连接,所述连接块的一侧外壁固定连接有滑块三,所述盒体的内壁底部固定连接有警报器,所述警报器的一侧外壁固定连接有控制按钮,所述控制按钮的一侧外壁固定连接有滑块四,所述盒体的一侧外壁且位于警报器的右侧开设有扬声孔。
10.优选的,所述防碰撞板的两侧均设置有两侧防护结构。
11.优选的,所述两侧防护结构包括有防护板,所述防护板被转动安装在防碰撞板的两侧,所述防护板的一侧固定连接有滑杆二,所述滑杆二的一端固定连接有限位块,所述限位块的外壁滑动连接有固定杆,所述固定杆的一端与防碰撞板的一侧外壁固定连接,所述限位块的一侧外壁与防碰撞板的一侧外壁且位于固定杆的内部固定连接有弹簧三。
12.优选的,所述限位杆的上设置有缓冲结构。
13.优选的,所述缓冲结构包括有齿条一,所述齿条一的顶部外壁与限位杆的底部外壁固定连接,所述盒体的两侧内壁之间固定连接有转动轴,所述转动轴的外壁转动连接有齿轮,所述齿轮的齿牙和齿条一的齿牙相啮合,所述盒体的一侧滑动连接有滑杆三,所述滑杆三的一端且位于盒体的外部固定连接有缓冲板,所述滑杆三的一端且位于盒体的内部固定连接有齿条二,所述齿条二的齿牙与齿轮的齿牙相啮合。
14.优选的,所述限位杆和滑杆三上设置有稳定结构。
15.优选的,所述稳定结构包括有滑槽一,所述滑槽一被开设在滑杆三上,所述盒体的内壁两侧之间固定连接有稳定杆一,所述稳定杆一的外壁与滑槽一的内壁滑动连接。
16.优选的,所述稳定结构包括有滑槽二,所述滑槽二被开设在限位杆上,所述盒体的内壁两侧之间固定连接有稳定杆二,所述稳定杆二的外壁与滑槽二的内壁滑动连接。
17.与现有技术相比,本发明的有益效果是:
18.1、通过防碰撞板向内部挤压滑杆一滑动,滑杆一在向盒体滑动的时会带动限位杆滑动,从而带动滑块一滑动,滑块一滑动时,会与滑块二相对滑动,从而在斜面的作用下,向下挤压滑块二,滑块二在下移的过程中,会带动升降杆下移,在升降杆下移时,会带动固定板下移,固定板会在挤压作用下升高,从而实现将机器人前轮抬离地面,使前轮属于悬空状态,进而降低的机器人在发生碰撞之后,驱动系统还会继续工作,使机器人继续前进,从而导致了机器人的受损情况更加严重的问题;
19.2、通过滑块二在下移时会带动连接块下移,连接块会带动滑块三下移,当滑块三在下移的过程中,接触到滑块四之后,滑块三和滑块四在斜面的作用下,滑块三会向右挤压滑块四,滑块四会向右挤压控制按钮,当机器人前轮处于悬空状态时,滑块四会挤压控制按钮到达最右端,从而开启警报器,警报器发出警报,通过扬声孔传出装置,从而实现通知工作人员,及时过来查看情况,降低了机器人发生碰撞之后,工作人员不能第一时间发现,从而导致机器人如果出现碰撞之后,如果受到损坏之后不能及时发现维修的问题。
附图说明
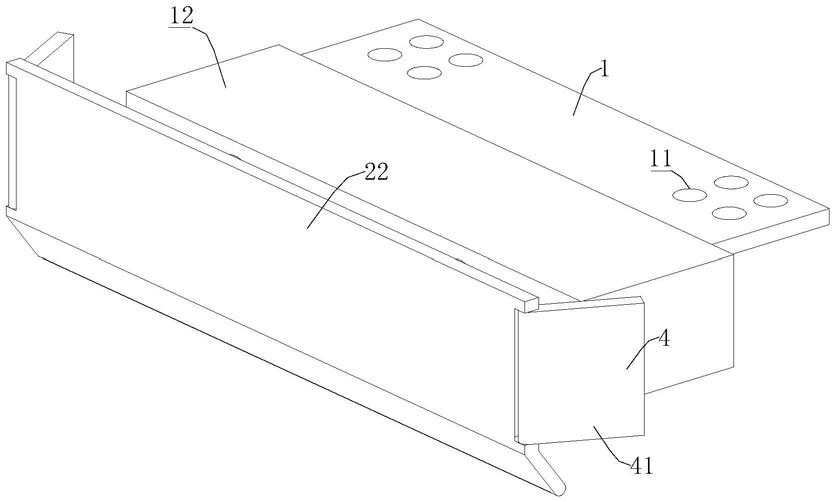
20.图1为本发明的结构示意图;
21.图2为本发明的结构剖视图;
22.图3为本发明的结构剖视图;
23.图4为本发明的两侧防护结构处的结构示意图。
24.图中:1、连接板;11、连接孔;12、盒体;2、防碰撞结构;21、滑杆一;211、弹簧一;22、防碰撞板;23、限位杆;24、滑块一;25、滑块二;26、升降杆;27、弹簧二;28、固定板;3、警报结构;31、连接块;32、滑块三;33、警报器;34、控制按钮;35、滑块四;36、扬声孔;4、两侧防护结构;41、防护板;42、滑杆二;43、限位块;44、固定杆;45、弹簧三;5、缓冲结构;51、齿条一;52、转动轴;53、齿轮;54、滑杆三;55、缓冲板;56、齿条二;6、稳定结构;61、滑槽一;62、稳定杆
一;63、滑槽二;64、稳定杆二。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.请参阅图1至图4,本发明提供一种技术方案:
27.变电站巡检机器人的防碰撞装置,如图1至图3所示,包括连接板1,连接板1上开设有连接孔11,连接板1的一侧外壁固定连接有盒体12,盒体12上设置有防碰撞结构2;
28.防碰撞结构2包括有滑杆一21,滑杆一21的外壁与盒体12的一侧内壁滑动连接,滑杆一21的一端固定连接有防碰撞板22,防碰撞板22和盒体12的一侧外壁且位于滑杆一21的外部固定连接有弹簧一211,滑杆一21的一端且位于盒体12的内部固定连接有限位杆23,限位杆23远离滑杆一21的一端固定连接有滑块一24,盒体12的底部滑动连接有升降杆26,升降杆26的顶端固定连接有滑块二25,滑块二25的底部外壁与盒体12的内壁底部之间且位于升降杆26的外部固定连接有弹簧二27,升降杆26的底端且位于盒体12的下方固定连接有固定板28,滑块一24的斜面和滑块二25的斜面滑动连接;
29.通过连接孔11将连接板1与机器人进行连接固定,从而实现将防碰撞装置与机器人进行固定,当机器人发生碰撞时,防碰撞结构2会将机器人的前轮抬起,从而避免机器人发生碰撞后,驱动结构继续驱动机器人前进,从而导致机器人受损情况更加严重的问题;
30.当机器人受到碰撞时,首先碰撞物体会接触到防碰撞板22,车子会继续前进,同时强大的撞击力也会挤压防碰撞板22,防碰撞板22受到挤压之后会压缩弹簧一211,通过弹簧一211的弹力实现缓冲效果,同时防碰撞板22会向内部挤压滑杆一21滑动,滑杆一21在向盒体12滑动的时会带动限位杆23滑动,从而带动滑块一24滑动,滑块一24滑动时,会与滑块二25相对滑动,从而在斜面的作用下,向下挤压滑块二25,滑块二25在下移的过程中,会带动升降杆26下移,同时压缩弹簧二27,实现二次缓冲,避免弹簧一211的弹力小于冲击力,造成缓冲效果差的问题,在升降杆26下移时,会带动固定板28下移,固定板28与地面接触之后,在驱动系统的工作状态下,机器人会继续前进,固定板28会在挤压作用下继续升高,从而实现将机器人前轮抬离地面,使前轮属于悬空状态,进而降低的机器人在发生碰撞之后,驱动系统还会继续工作,使机器人继续前进,从而导致了机器人的受损情况更加严重的问题。
31.作为本发明的一种实施方式,如图2与图3所示,盒体12的内壁设置有警报结构3;
32.警报结构3包括有连接块31,连接块31的一侧外壁与滑块二25的一侧外壁固定连接,连接块31的一侧外壁固定连接有滑块三32,盒体12的内壁底部固定连接有警报器33,警报器33的一侧外壁固定连接有控制按钮34,控制按钮34的一侧外壁固定连接有滑块四35,盒体12的一侧外壁且位于警报器33的右侧开设有扬声孔36;
33.当机器人发生碰撞之后,工作人员不能第一时间发现,从而导致机器人如果出现碰撞之后,如果受到损坏之后不能及时发现维修的问题;
34.当机器人发生碰撞之后,滑块二25在下移时会带动连接块31下移,连接块31会带动滑块三32下移,当滑块三32在下移的过程中,接触到滑块四35之后,滑块三32和滑块四35
在斜面的作用下,滑块三32会向右挤压滑块四35,滑块四35会向右挤压控制按钮34,当机器人前轮处于悬空状态时,滑块四35会挤压控制按钮34到达最右端,从而开启警报器33,警报器33发出警报,通过扬声孔36传出装置,从而实现通知工作人员,及时过来查看情况,降低了机器人发生碰撞之后,工作人员不能第一时间发现,从而导致机器人如果出现碰撞之后,如果受到损坏之后不能及时发现维修的问题。
35.作为本发明的一种实施方式,如图4所示,防碰撞板22的两侧均设置有两侧防护结构4;
36.两侧防护结构4包括有防护板41,防护板41被转动安装在防碰撞板22的两侧,防护板41的一侧固定连接有滑杆二42,滑杆二42的一端固定连接有限位块43,限位块43的外壁滑动连接有固定杆44,固定杆44的一端与防碰撞板22的一侧外壁固定连接,限位块43的一侧外壁与防碰撞板22的一侧外壁且位于固定杆44的内部固定连接有弹簧三45;
37.当机器人两侧有碰撞物时,防碰撞装置没有对于两侧的保护结构,当两侧受到碰撞时,无法对机器人进行保护,从而导致机器人受损的情况;
38.当两侧受到碰撞时,防护板41受到撞击之后,会向防碰撞板22内侧转动,再转动的同时会带动滑杆二42向固定杆44内部收缩,同时会挤压弹簧三45,弹簧三45在受到挤压后,在弹簧三45的弹性作用下会挤压限位块43,从而将滑杆二42挤出固定杆44,从而使防护板41向防碰撞板22外侧转动,从而实现将撞击物格挡并推开,从而降低防碰撞装置没有对于两侧的保护结构,当两侧受到碰撞时,无法对机器人进行保护,从而导致机器人受损的情况。
39.作为本发明的一种实施方式,如图2至图3所示,限位杆23的上设置有缓冲结构5;
40.缓冲结构5包括有齿条一51,齿条一51的顶部外壁与限位杆23的底部外壁固定连接,盒体12的两侧内壁之间固定连接有转动轴52,转动轴52的外壁转动连接有齿轮53,齿轮53的齿牙和齿条一51的齿牙相啮合,盒体12的一侧滑动连接有滑杆三54,滑杆三54的一端且位于盒体12的外部固定连接有缓冲板55,滑杆三54的一端且位于盒体12的内部固定连接有齿条二56,齿条二56的齿牙与齿轮53的齿牙相啮合;
41.当防碰撞板22受到的冲击力过大时,会直接将防碰撞板22推至盒体12处,防碰撞板22与盒体12的直接碰撞,可能会导致装置产生损坏的问题;
42.当防碰撞板22受到撞击后,限位杆23会向右滑动,从而带动齿条一51向右滑动,从而带动齿轮53在转动轴52上转动,因为齿轮53与齿条二56相啮合没从而齿轮53会带动齿条二56向左移动,通过齿条二56向左移动带动滑杆三54向左移动,从而通过滑杆三54带动缓冲板55向左移动,当缓冲板55与防碰撞板22接触时,会将碰撞产生的冲击力通过缓冲板55传导到防碰撞板22上,通过将碰撞所产生的冲击力转化成缓冲力与撞击力相作用,从而实现缓冲的效果,避免了当防碰撞板22受到的冲击力过大时,会直接将防碰撞板22推至盒体12处,防碰撞板22与盒体12的直接碰撞,可能会导致装置产生损坏的问题。
43.作为本发明的一种实施方式,如图2至图3所示,限位杆23和滑杆三54上设置有稳定结构6;
44.稳定结构6包括有滑槽一61,滑槽一61被开设在滑杆三54上,盒体12的内壁两侧之间固定连接有稳定杆一62,稳定杆一62的外壁与滑槽一61的内壁滑动连接;
45.在滑杆三54向左滑动的过程中,除了在盒体12上滑动,滑槽一61也在稳定杆一62
上滑动,两个点形成一个水平线,确定了滑杆三54的滑动轨迹,有效的防止齿条二56从齿轮53上脱落的情况。
46.稳定结构6包括有滑槽二63,滑槽二63被开设在限位杆23上,盒体12的内壁两侧之间固定连接有稳定杆二64,稳定杆二64的外壁与滑槽二63的内壁滑动连接;
47.在限位杆23向右滑动的过程中,除了在盒体12上滑动,滑槽二63也在稳定杆二64上滑动,两个点形成一个水平线,确定了限位杆23的滑动轨迹,有效的防止齿条一51从齿轮53上脱落的情况。
48.工作原理:通过连接孔11将连接板1与机器人进行连接固定,从而实现将防碰撞装置与机器人进行固定,当机器人受到碰撞时,首先碰撞物体会接触到防碰撞板22,车子会继续前进,同时强大的撞击力也会挤压防碰撞板22,防碰撞板22受到挤压之后会压缩弹簧一211,通过弹簧一211的弹力实现缓冲效果,同时防碰撞板22会向内部挤压滑杆一21滑动,滑杆一21在向盒体12滑动的时会带动限位杆23滑动,从而带动滑块一24滑动,滑块一24滑动时,会与滑块二25相对滑动,从而在斜面的作用下,向下挤压滑块二25,滑块二25在下移的过程中,会带动升降杆26下移,同时压缩弹簧二27,实现二次缓冲,避免弹簧一211的弹力小于冲击力,造成缓冲效果差的问题,在升降杆26下移时,会带动固定板28下移,固定板28与地面接触之后,在驱动系统的工作状态下,机器人会继续前进,固定板28会在挤压作用下继续升高,从而实现将机器人前轮抬离地面,使前轮属于悬空状态,进而降低的机器人在发生碰撞之后,驱动系统还会继续工作,使机器人继续前进,从而导致了机器人的受损情况更加严重的问题;
49.当防碰撞板22受到撞击后,限位杆23会向右滑动,在限位杆23向右滑动的过程中,除了在盒体12上滑动,滑槽二63也在稳定杆二64上滑动,两个点形成一个水平线,确定了限位杆23的滑动轨迹,有效的防止齿条一51从齿轮53上脱落的情况,从而带动齿条一51向右滑动,从而带动齿轮53在转动轴52上转动,因为齿轮53与齿条二56相啮合没从而齿轮53会带动齿条二56向左移动,通过齿条二56向左移动带动滑杆三54向左移动,从而通过滑杆三54带动缓冲板55向左移动,在滑杆三54向左滑动的过程中,除了在盒体12上滑动,滑槽一61也在稳定杆一62上滑动,两个点形成一个水平线,确定了滑杆三54的滑动轨迹,有效的防止齿条二56从齿轮53上脱落的情况,当缓冲板55与防碰撞板22接触时,会将碰撞产生的冲击力通过缓冲板55传导到防碰撞板22上,通过将碰撞所产生的冲击力转化成缓冲力与撞击力相作用,从而实现缓冲的效果,避免了当防碰撞板22受到的冲击力过大时,会直接将防碰撞板22推至盒体12处,防碰撞板22与盒体12的直接碰撞,可能会导致装置产生损坏的问题。
50.同时滑块二25在下移时会带动连接块31下移,连接块31会带动滑块三32下移,当滑块三32在下移的过程中,接触到滑块四35之后,滑块三32和滑块四35在斜面的作用下,滑块三32会向右挤压滑块四35,滑块四35会向右挤压控制按钮34,当机器人前轮处于悬空状态时,滑块四35会挤压控制按钮34到达最右端,从而开启警报器33,警报器33发出警报,通过扬声孔36传出装置,从而实现通知工作人员,及时过来查看情况,降低了机器人发生碰撞之后,工作人员不能第一时间发现,从而导致机器人如果出现碰撞之后,如果受到损坏之后不能及时发现维修的问题;
51.当两侧受到碰撞时,防护板41受到撞击之后,会向防碰撞板22内侧转动,再转动的同时会带动滑杆二42向固定杆44内部收缩,同时会挤压弹簧三45,弹簧三45在受到挤压后,
在弹簧三45的弹性作用下会挤压限位块43,从而将滑杆二42挤出固定杆44,从而使防护板41向防碰撞板22外侧转动,从而实现将撞击物格挡并推开,从而降低防碰撞装置没有对于两侧的保护结构,当两侧受到碰撞时,无法对机器人进行保护,从而导致机器人受损的情况。
52.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1