用于自动化建立螺纹连接的装置的制作方法
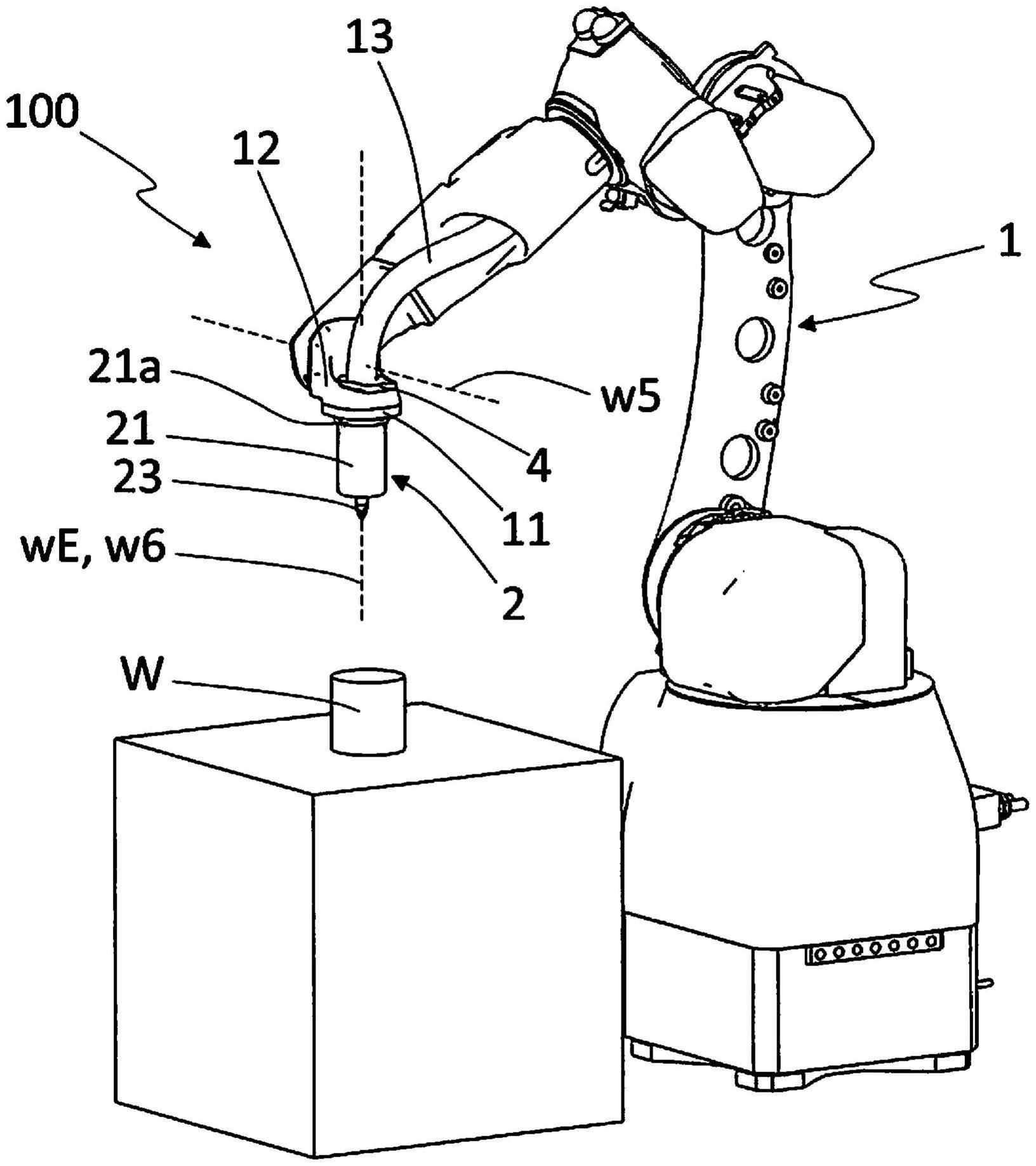
本发明涉及一种用于自动化建立螺纹连接的装置,该装置包括关节臂机器人和旋拧单元,该旋拧单元可以由关节臂机器人的端部环节的从动元件围绕效果器轴线旋转。
背景技术:
1、为了自动化建立螺纹连接,关节臂机器人通常设有自动旋拧机。这样的自动旋拧机包括旋拧工具以及所属的驱动器,所述驱动器具有电动马达。在现有技术中已知一些方案,其中,旋拧工具至少部分地也通过在关节臂机器人的端部环节上的从动元件来驱动。
2、例如ep 2 729 281 b1公开了一种用于利用机器人旋转接合和/或旋转松开尤其螺钉的旋拧装置,所述机器人具有从动的旋转轴线,其中,作为效果器的机器人承载独立驱动的带有旋转工具的旋转机构,其中,所述旋转机构被构造用于快速地将所述螺钉旋入/旋出,并且所述机器人的从动的旋转轴线被设置成旋紧/旋松所述螺钉。整个旋转机构被容纳在机器人的可旋转的从动元件上并且因此在其旋转操纵时通过机器人侧的旋转驱动器被置于旋转中,其中,可切换的锁止机构负责用于将转矩传输到旋转工具上。因此在ep 2 729281 b1中提出了混合式方案,其中,机器人通过其从动的旋转轴的旋转引起螺钉的旋松或旋紧,而剩余的旋拧过程通过以凸缘连接的旋转机构的单独驱动来完成。在此,机器人侧的从动元件的旋转角不利地受到很大限制,因为必须防止通往旋转机构的输入线路的卷绕。
3、de 20 2014 100 334 u1公开了机器人工具,具有支架和集成的传动系,用于使旋转工具的从动部件(尤其是螺丝刀头)旋转,其中,用于旋转操纵的传动系由机器人构造并且具有与所述从动部件连接的用于放大所述机器人的驱动转矩的转矩放大器。可选地,在此也可以有附加的集成在机器人工具中的由马达驱动的传动系作用到从动部件上。规定的是,将机器人工具容纳在外部的位置固定的引导器件上,这是对整个装置的灵活性方面的显著限制。
技术实现思路
1、本发明的任务是提出一种用于自动化建立螺纹连接的装置的改进方案,该装置包括关节臂机器人和旋拧单元,该旋拧单元可以由关节臂机器人的端部环节的从动元件围绕效果器轴线旋转。
2、该任务从根据权利要求1的前序部分所述的装置出发结合特征部分的特征来解决。本发明的有利的改进方案在从属权利要求中给出。
3、本发明包括这样的技术教导:旋拧单元具有壳体,其中,旋拧工具沿着所述效果器轴线在供应位置和至少一个旋拧位置之间能移动地容纳在所述壳体中,并且在所述壳体上布置有用于提供螺钉的嘴件。
4、在此,本发明基于如下构思:使用关节臂机器人的端部环节上的从动元件,以用于使旋拧单元连同旋拧工具无穷地旋转,从而可以省去如由现有技术的自动旋拧机所公知的另外的驱动器。从动元件是关节臂机器人的集成组成部分,从而现有技术中的通用关节臂机器人可以在不对根据本发明的装置中进行进一步修改的情况下使用。所述旋拧工具例如构造为螺丝刀或者具有螺丝刀头的刀头保持器。
5、此外,根据本发明提出,在可旋转地容纳在关节臂机器人的从动元件上的旋拧单元中集成有用于提供螺钉的嘴件。在此,壳体作为旋拧单元的基体起作用,嘴件布置在该壳体上并且在该壳体内部能轴向移动地容纳有旋拧工具。壳体例如也被设置用于例如借助壳体凸缘将旋拧单元与关节臂机器人的从动元件抗相对旋转地连接。根据本发明,包括壳体、旋拧工具和嘴件的整个旋拧单元参与从动元件围绕效果器轴线的旋转。
6、如下面将详细说明的那样,根据本发明的装置优选包括用于在壳体内移动旋拧工具的移动器件。利用根据本发明的装置执行的用于自动建立螺纹连接的方法以将螺钉供应到嘴件开始,其中,所述旋拧工具处于供应位置中,在所述供应位置中,待供应的螺钉的嘴件是可接近的。随后,旋拧工具沿着效果器轴线向前推进并且与螺钉头驱动器嵌接。通过借助关节臂机器人的从动元件使旋拧单元旋转,就可以将转矩导入到螺钉中,并且旋拧工具进一步向前推进到旋拧位置中将螺钉从嘴件中推出。
7、通过机器人侧的从动元件完全取代由现有技术中的自动旋拧机使用的旋拧工具的单独驱动,有利地导致了机器人上承受的重量的降低以及要耗费的运行器件成本的降低。与根据本发明的在机器人的端部环节上的嘴件的容纳相结合,如以下将更详细地说明的那样,提供了一种用于自动化的螺钉供应的可能性,从而该取代不会对利用该装置可执行的螺纹连接的建立的自动化程度造成影响。
8、在有利的实施方式中,根据本发明的装置具有用于压缩空气和/或电信号的旋转贯穿件,其中,所述旋转贯穿件的定子布置在所述端部环节上,并且所述旋转贯穿件的转子能够一起旋转地布置在所述旋拧单元和/或所述从动元件上。旋转贯穿件能够实现用于压缩空气和/或电信号的在旋拧过程中固定的定子和随着旋拧单元一起旋转的转子之间的密封的过渡。由此可以实现利用压缩空气来加载旋转的旋拧工具,由此能够实现所述旋拧工具在供应位置与旋拧位置之间的主动移动。备选地,可以将电功率信号和/或控制信号传输给容纳在所述旋拧单元的壳体中的用于移动所述旋拧工具的调节器件。
9、优选地,所述旋拧工具能移动地容纳在工具通道中,其中,所述工具通道具有至少一个内部槽,并且所述旋拧工具具有至少一个容纳在所述槽中的引导销,从而通过借助于所述槽和所述引导销形成的形锁合的连接能够将转矩传递到所述旋拧工具上。转矩的传递从关节臂机器人的从动元件出发进行到旋拧单元的随同旋转的壳体上并且此外进行到容纳在其中的旋拧工具上。槽具有沿着工具通道的内壁的基本轴向的走向,从而没有显著的运动阻力与旋拧工具在效果器轴线上通过在槽中引导的引导销的移动进行相反作用。例如,槽走向可以反映拉伸的螺旋线的区段。为转矩传输而建立的在槽与引导销之间的连接必须在旋转方向上是形锁合的。
10、在有利的实施方式中,旋拧单元具有用于将螺钉供应到嘴件中的供应通道。如下面将更详细地阐述的那样,由此能够实现自动螺钉供应的集成,由此能够执行全自动且有效的过程以建立螺纹连接。
11、特别优选地,所述旋拧工具能够通过所述旋转贯穿件被加载有压缩空气,使得所述旋拧工具能够借助于加载有过压或者负压在所述旋拧位置与所述供应位置之间移动。压缩空气在此作用于所述旋拧工具的后端部上,该后端部因此在那里必须与所述工具通道的内壁气密地封闭,以用于能够在所述工具通道的内部建立为移动或者说保持所述旋拧工具所必需的压差。这种气动调节方法是稳健的、轻便的和成本低廉的实施方式。
12、优选地,在具有气动调节方法的实施方式中,所述旋拧单元具有至少一个调节弹簧,所述调节弹簧将所述旋拧工具预紧到所述供应位置中。在借助压缩空气将旋拧工具向前推进到旋拧位置中时,必须克服调节弹簧做功并且在调节弹簧松弛的情况下实现旋拧工具返回到供应位置中,从而不需要附加地以负压加载。
13、在备选的实施方式中,所述旋拧单元具有电起重磁体,该电起重磁体能够通过所述旋转贯穿件用电信号来操控,其中,所述旋拧工具被容纳在所述起重磁体上,使得所述旋拧工具能够借助于所述起重磁体的操控在所述供应位置与所述旋拧位置之间移动。
14、在另外的实施方式中,旋拧单元具有滑块,其中,所述工具通道和所述供应通道在所述滑块中延伸,并且所述滑块借助于通过所述旋转贯穿件被加载有压缩空气能够沿径向于所述效果器轴线的方向移动,从而能够选择性地使所述工具通道或所述供应通道与所述效果器轴线重合。通过可径向移动的滑块可以将螺钉自动地供应到嘴件中。带有滑块的旋拧单元优选具有至少一个滑块复位弹簧,滑块复位弹簧将滑块预紧到径向的端部位置中。
15、在另外的实施方式中,根据本发明的装置具有布置在关节臂机器人的端部环节上的连接元件,该连接元件包括至少一个用于将螺钉供应到供应通道中的供应开口和/或至少一个用于将压缩空气供应到旋转贯穿件的定子侧的接头的压缩空气接头和/或至少一个用于操控旋转贯穿件的定子侧的输入端的电接头。利用连接元件提供用于供应运行介质的接口,该接口布置在关节臂机器人的端部环节上并且因此在旋拧过程中不参与旋拧单元的旋转。
16、例如具有连接元件的实施方式具有布置在连接元件上的储藏室,该储藏室包括用于储藏多个螺钉的滚筒,其中,所述滚筒可旋转地布置在底板上,其中,所述底板具有排出开口,所述排出开口被布置成与所述连接元件的供应开口重合。在此,储藏室的滚筒例如可以借助步进马达旋转,从而可以将被容纳的螺钉依次通过排出开口输送到供应开口中并且接着通过供应通道输送到嘴件中。
17、关节臂机器人的从动元件优选地构造为空心轴。这种空心轴机器人在现有技术中例如对于涂漆装置或焊接装置是常用的。与本发明相关联地,本发明能够实现所述旋拧单元和所述旋转贯穿件的在结构上特别灵巧并且稳健的集成。
- 还没有人留言评论。精彩留言会获得点赞!