一种工业机器人自动工具工件标定方法与流程
1.本发明涉及工业机器人技术领域,具体为一种工业机器人自动工具工件标定方法。
背景技术:
2.随着社会的发展,机器替代人工进行各种自动化作业处理,得到了飞速发展,在机器人使用中,需要让机器人知道自己拿了个什么样的工具,也就是机器人控制的工具中心定义。以及机器人要干什么,机器人工件坐标定义。
3.现有技术中一种工业机器人自动工具工件标定方法缺点不足:
4.1、专利文件cn109760108a公开了工业机器人技术领域的一种工业机器人吸盘式工具手标定定位方法,“该种工业机器人吸盘式工具手标定定位方法具体步骤如下:将工业机器人工具手原有的固定吸盘进行拆卸,控制气缸带动固定安装在导向板一上的标定轴进行下移,使得标定轴下端标定头下移至预留孔的下方,然后通过定位套进行定位固定;工业机器人工具手按照原吸盘的作业方式进行轨道;控制智能小车在生产作业线上的轨道上进行移动,智能小车上安装有支撑架,通过基准轴与标定头配合,由编程控制器按照工具坐标系标定算法,自动计算出工业机器人工具手的坐标系位置,检测定位精度,同时也能保护工具手的吸盘,提高了设备的使用寿命,工业机器人工具手标定更为简单。”,但目前市面上现有的机器人工具、工件标定方式,一般是人工定义两个标定尖端,利用肉眼识别尖端对齐,人工记录机器人位置,多点计算机器人工具工件坐标。在实际应用中此方法精度差:通过肉眼识别尖端对齐状态,人为主管硬塑占主导作用,经验丰富的技术人员对齐状态良好;
5.2、现有技术中一种工业机器人自动工具工件标定方法,在使用时,初学者会存在对不齐,需要重复多次对齐标定的现象;效率低;
6.3、现有技术中一种工业机器人自动工具工件标定方法,在使用时,全程人工手动操作,查看和对齐标定尖端,重复多次操作,极易出现操作失误而导致撞机。
技术实现要素:
7.本发明的目的在于提供一种工业机器人自动工具工件标定方法,以解决上述背景技术中提出的问题。
8.为实现上述目的,本发明提供如下技术方案,一种工业机器人自动工具工件标定方法,包括以下工作步骤:步骤一:将所有硬件零件按照结构及连接关系连接。步骤二:操作4-工业机器人使2-寻边器在105-基准球前方点位,此时2-寻边器不与105基准球接触。步骤三:运行机器人自动标定程序,机器人固定姿态自动寻找105-基准球,使2-寻边器与105-基准球接触。步骤四:4-机器人固定姿态自动运行与105-基准球接触三次,分别记录p1,p2,p3三点。步骤五:根据p1,p2,p3三点,求圆心计算109-机器人运行轨迹中心坐标。步骤六:改变4-机器人姿态。步骤七:重复步骤二,重复步骤三,重复步骤四,重复步骤五。步骤八:重复步骤六,重复步骤七。步骤九:重复步骤六,重复步骤七。步骤十:步骤五,步骤七,步骤八,步骤
九分别用不同姿态记算了四个109-机器人运行轨迹中心坐标。
9.优选的,所述计算原理:
10.因为,qw=tw;
11.qh=th;
12.109-机器人运行轨迹中心到107-基准球中心
13.108-机器人工具连接法兰中心到107-工具标定中心
[0014][0015]
所以,qd=td;
[0016]
又因为:qd’=qd,td’=td;
[0017]
所以,机器人改变四次姿态得到四个qd距离,也就是四个109-机器人运行轨迹中心坐标。
[0018]
优选的,所述将四个109-机器人运行轨迹中心坐标输入到机器人四点工具标定寄存器中,计算出106-标定工具中心。
[0019]
优选的,所述将106-标定工具中心作为机器人工具坐标。
[0020]
优选的,所述固定机器人姿态,再次靠近基准球前侧,记录此时点位。
[0021]
优选的,所述再次运行机器人自动标定程序,2-寻边器三次接触基准球,利用利用三点求圆心,计算107-基准球中心坐标。
[0022]
优选的,所述寻边器再记录下一个基准球前侧,重复步骤十五,计算完1-基准标定板上全部一共七个107-基准球中心坐标位置。
[0023]
优选的,所述利用七个点建立107-基准球中心构成的平面为工件坐标平面,用户指定任意一基准球中心为原点,工件x方向。此时工件坐标算完。
[0024]
优选的,所述机器人自动运行原理:
[0025]
机器人程序prg:
[0026]
[0027][0028]
与现有技术相比,本发明的有益效果如下:
[0029]
1、本发明通过利用两球多次相切,求两球圆心所在位置,用球体接触可保证接触时是点接触,最大限度提高接触精度。
[0030]
2、本发明通过利用不在同一平面的四点计算球心和半径。因为半径是用作接触两球体的半径总和,是已知量。故可利用该数值和计算结果半径做数值比较,评判当前标定精度误差。
[0031]
3、本发明通过由用户定义一个初始球体位置。系统根据初始位置计算出剩下的球体表面点位,并控制机器人自动运行,直至两球接触记录此时机器人点位,此步骤可取代繁琐的人工操作。
附图说明
[0032]
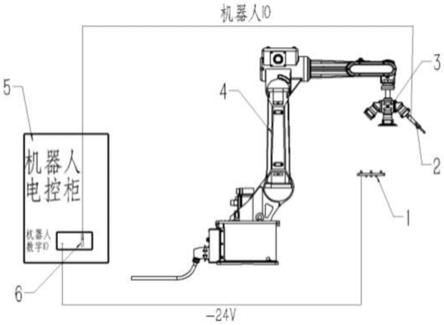
图一是本发明的一个整个方案图;
[0033]
图二是本发明中标定计算过程图样编号;
[0034]
图三是本发明中标定计算过程距离尺寸示意图;
[0035]
图四是本发明全部工件标定基准球分布图;
[0036]
图五是本发明中自动寻球示意图;
[0037]
图六是本发明的机器人自动寻球程序流程。
[0038]
图中:1、基准标定板;2、寻边器;3、工业机器人末端工具;4、工业机器人;5、工业机器人控制柜;6、工业机器人数字io;101、机器人运行轨迹;102、寻边器运行;103、基准标定板固定螺丝;104、基准标定板主板;105、基准球;106、标定工具中心;107、基准球中心;108、机器人工具连接法兰中心;109、机器人运行轨迹中心。
具体实施方式
[0039]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0040]
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0041]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设
置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0042]
请参阅图1-6,本发明提供的一种实施例,一种工业机器人自动工具工件标定方法,步骤一:将所有硬件零件按照结构及连接关系连接。步骤二:操作4-工业机器人使2-寻边器在105-基准球前方点位,此时2-寻边器不与105基准球接触。步骤三:运行机器人自动标定程序,机器人固定姿态自动寻找105-基准球,使2-寻边器与105-基准球接触。步骤四:4-机器人固定姿态自动运行与105-基准球接触三次,分别记录p1,p2,p3三点。步骤五:根据p1,p2,p3三点,求圆心计算109-机器人运行轨迹中心坐标。步骤六:改变4-机器人姿态。步骤七:重复步骤二,重复步骤三,重复步骤四,重复步骤五。步骤八:重复步骤六,重复步骤七。步骤九:重复步骤六,重复步骤七。步骤十:步骤五,步骤七,步骤八,步骤九分别用不同姿态记算了四个109-机器人运行轨迹中心坐标,所述计算原理:因为,qw=tw;qh=th;109-机器人运行轨迹中心到107-基准球中心108-机器人工具连接法兰中心到107-工具标定中心所以,qd=td;又因为:qd’=qd,td’=td;所以,机器人改变四次姿态得到四个qd距离,也就是四个109-机器人运行轨迹中心坐标,所述将四个109-机器人运行轨迹中心坐标输入到机器人四点工具标定寄存器中,计算出106-标定工具中心,所述将106-标定工具中心作为机器人工具坐标,所述固定机器人姿态,再次靠近基准球前侧,记录此时点位,所述再次运行机器人自动标定程序,2-寻边器三次接触基准球,利用利用三点求圆心,计算107-基准球中心坐标,述寻边器再记录下一个基准球前侧,重复步骤十五,计算完1-基准标定板上全部一共七个107-基准球中心坐标位置,所述利用七个点建立107-基准球中心构成的平面为工件坐标平面,用户指定任意一基准球中心为原点,工件x方向。此时工件坐标算完。
[0043]
本发明中,该装置的工作步骤如下:
[0044]
实施例一:
[0045]
所述寻边器组件,可以使用成本更高的红宝石机床触头代替:
[0046]
步骤一:将所有硬件零件按照结构及连接关系连接。步骤二:操作4-工业机器人使2-寻边器在105-基准球前方点位,此时2-寻边器不与105基准球接触。步骤三:运行机器人自动标定程序,机器人固定姿态自动寻找105-基准球,使2-寻边器与105-基准球接触。步骤四:4-机器人固定姿态自动运行与105-基准球接触三次,分别记录p1,p2,p3三点。步骤五:根据p1,p2,p3三点,求圆心计算109-机器人运行轨迹中心坐标。步骤六:改变4-机器人姿态。步骤七:重复步骤二,重复步骤三,重复步骤四,重复步骤五。步骤八:重复步骤六,重复步骤七。步骤九:重复步骤六,重复步骤七。步骤十:步骤五,步骤七,步骤八,步骤九分别用不同姿态记算了四个109-机器人运行轨迹中心坐标,所述计算原理:因为,qw=tw;qh=th;109-机器人运行轨迹中心到107-基准球中心108-机器人工具连接法兰中心到107-工具标定中心所以,qd=td;又因为:qd’=qd,td’=td;所以,机器人改变四次姿态得到四个qd距离,也就是四个109-机器人运行轨迹中心坐标,所
述将四个109-机器人运行轨迹中心坐标输入到机器人四点工具标定寄存器中,计算出106-标定工具中心,所述将106-标定工具中心作为机器人工具坐标,所述固定机器人姿态,再次靠近基准球前侧,记录此时点位,所述再次运行机器人自动标定程序,2-寻边器三次接触基准球,利用利用三点求圆心,计算107-基准球中心坐标,述寻边器再记录下一个基准球前侧,重复步骤十五,计算完1-基准标定板上全部一共七个107-基准球中心坐标位置,所述利用七个点建立107-基准球中心构成的平面为工件坐标平面,用户指定任意一基准球中心为原点,工件x方向。此时工件坐标算完,继而使得硬件成本至少增加十倍;
[0047]
实施例二:
[0048]
所述基准球是机床加工校准基准标件,可以自行加工也可以采购供应商标准件使用:
[0049]
步骤一:将所有硬件零件按照结构及连接关系连接。步骤二:操作4-工业机器人使2-寻边器在105-基准球前方点位,此时2-寻边器不与105基准球接触。步骤三:运行机器人自动标定程序,机器人固定姿态自动寻找105-基准球,使2-寻边器与105-基准球接触。步骤四:4-机器人固定姿态自动运行与105-基准球接触三次,分别记录p1,p2,p3三点。步骤五:根据p1,p2,p3三点,求圆心计算109-机器人运行轨迹中心坐标。步骤六:改变4-机器人姿态。步骤七:重复步骤二,重复步骤三,重复步骤四,重复步骤五。步骤八:重复步骤六,重复步骤七。步骤九:重复步骤六,重复步骤七。步骤十:步骤五,步骤七,步骤八,步骤九分别用不同姿态记算了四个109-机器人运行轨迹中心坐标,所述计算原理:因为,qw=tw;qh=th;109-机器人运行轨迹中心到107-基准球中心108-机器人工具连接法兰中心到107-工具标定中心所以,qd=td;又因为:qd’=qd,td’=td;所以,机器人改变四次姿态得到四个qd距离,也就是四个109-机器人运行轨迹中心坐标,所述将四个109-机器人运行轨迹中心坐标输入到机器人四点工具标定寄存器中,计算出106-标定工具中心,所述将106-标定工具中心作为机器人工具坐标,所述固定机器人姿态,再次靠近基准球前侧,记录此时点位,所述再次运行机器人自动标定程序,2-寻边器三次接触基准球,利用利用三点求圆心,计算107-基准球中心坐标,述寻边器再记录下一个基准球前侧,重复步骤十五,计算完1-基准标定板上全部一共七个107-基准球中心坐标位置,所述利用七个点建立107-基准球中心构成的平面为工件坐标平面,用户指定任意一基准球中心为原点,工件x方向。此时工件坐标算完,精度再0.01以内均可满足,精度越高,加工费用越贵。
[0050]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1