一种具有多点触觉感知的灵巧手指尖
1.本发明涉及机器人传感技术领域,特别是涉及一种具有多点触觉感知的灵巧手指尖及其制备方法。
背景技术:
2.机器人在进行一项复杂操作任务时,常常通过各类传感器获取周围环境信息,最常见的有视觉传感器和触觉传感器等。由于计算机视觉以及图像处理技术的日益发展,视觉传感器已被机器人广泛装备使用。然而,视觉传感技术仍面临许多困难与挑战,比如视觉传感器无法在光线昏暗、背景干扰物较多的复杂环境下发挥其性能。其次,视觉传感技术也无法获取物体的刚度、纹理、重量和硬度等物理特征。因此,为机器人安装高性能触觉传感器去探索环境并识别物体已成为当前的发展趋势。同时,随着石墨烯、多壁碳纳米管等新型优良导电材料的出现,触觉传感器逐渐朝着高灵敏度、高阵列化、柔性化方向发展。这也为机器人实现具有与人类接近的触觉感知能力提供了可能性。
3.尽管目前指尖触觉传感器的方案有很多,但是能够实际应用于机械手指尖进行日常操作辅助的触觉传感器还是较少。传统的指尖传感器大多为金属制品,体积较大,难以集成于灵巧手的指尖内部;且大多为单点式,能够采集的指尖信息较少,无法满足灵巧手的探索需求。因此,开发具有高度灵敏、稳定性好以及完全集成于灵巧手指尖的柔性阵列式触觉传感器仍然是紧迫的挑战。
技术实现要素:
4.本发明为了克服现有技术中指尖接触传感器阵列化低、灵敏度低、集成度低且制造成本较高等技术问题,提供一种具有多点触觉感知的灵巧手指尖及其制备方法,所述指尖内封装有阵列式触觉传感器,可实现多点接触力的检测且制造成本较低,为后续多灵巧手实现灵巧操作打下基础。
5.为了实现上述目的,本发明采用的技术方案是:
6.具有多点触觉感知的灵巧手指尖,包括压阻式触觉传感单元,该传感单元包括作为基板、附着于基板上的阵列电极、设于阵列电极上方的压阻层、用于固定基板与压阻层的塑封层、附着于塑封层上方的预压垫片、设于预压垫片上方的硅胶触点层和将传感单元整体封装的指尖基座与指尖夹板,所述硅胶触点层上设有阵列触点与所述阵列电极对应。
7.进一步的,所述基板采用聚酰亚胺薄膜,阵列电极印刷于聚酰亚胺薄膜上。
8.进一步的,所述指尖基座顶部预留有安装槽用于放置传感器单元,指尖基座上设有滑槽用于指尖夹板的安装;指尖夹板上留出阵列孔与所述阵列电极对应,使得硅胶触点层的触点露出于指尖表面,指尖夹板通过卡扣与指尖基座固定,使得传感器单元不会发生偏移并具有一定的预压力。
9.进一步的,所述压阻层选用velostat导电薄膜。
10.进一步的,所述阵列电极包括一个公共电极以及其余呈阵列排布的电极,公共电
极连接gnd端,其余电极连接电源正极,当传感器单元受到压力时,对应区域的压阻材料连通电极与公共电极从而形成具有阻值的导电通路,且阻值的大小与压力大小成反比。
11.进一步的,所述的预压垫片及硅胶触点层中的硅胶均采用ecoflex0030双组份液态铂金硅胶。
12.进一步的,所述的硅胶触点层的制备方法包括:使用具有半球空腔阵列的模具,将混合均匀的硅胶与玻璃微珠混合物倒入模具,在0.1mpa的负压下抽离混合物中的气泡,固化后脱模形成柔性触点层,玻璃微球在硅胶中的质量分数为5%。
13.进一步的,所述的指尖基座与指尖夹板均采用3d打印的方式加工,其材料为环氧树脂。
14.综上所述,本发明具有如下有益效果:
15.(1)集成度高且体积小,安装时无需额外任何连接件;
16.(2)所述指尖传感器可实现对多点接触力的检测且制造成本较低;
17.(3)通过设置硅胶的预压垫片可以使传感器具有一定的初始预压力,跳过初始阶段的非线性区间,有利于提高检测的灵敏度;
18.(4)在硅胶触点层中加入特定量的玻璃微珠,可有效提高触点层的弹性模量,使得传感器在接触物体时接触力能更好地传到传感单元,提升了传感器的灵敏度。
附图说明
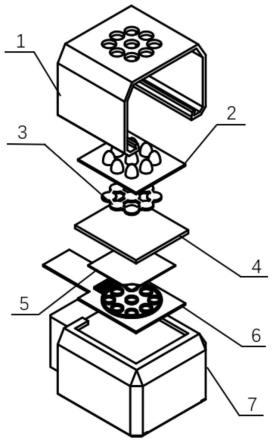
19.图1是本发明中压阻式柔性阵列触觉传感器总体封装爆炸示意图。
20.图2是本发明中传感器电极结构图。
21.图3是本发明中传感器指尖基座左视图。
22.图4为本发明中传感器有无预压垫片时的压力特性曲线对比。
23.图中:
24.指尖夹板1,硅胶触点层2,硅胶预压垫片3,塑封薄膜4,velostat压阻薄膜5,电极层6,指尖基座7,公共端电极8,阵列式电极9,指尖基座底部滑槽10。
具体实施方式
25.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
26.本发明的具有多点触觉感知的灵巧手指尖,包括压阻式触觉传感单元,该传感单元包括作为基板、附着于基板上的阵列电极、设于阵列电极上方的压阻层、用于固定基板与压阻层的塑封层(即压阻层材料与电极通过塑封层的封装而完全贴合)、附着于塑封层上方的预压垫片、设于预压垫片上方的硅胶触点层和将传感单元整体封装的指尖基座与指尖夹板,所述硅胶触点层上设有阵列触点与所述阵列电极对应。
27.在本发明的一种具体实施例中,阵列电极包括9个阵列排布的电极及1个公共电极,压阻材料覆盖于电极层上,其中9个阵列电极连接电源正极,1个公共电极连接gnd端,传感单元在受到压力时,对应区域的压阻材料会连通阵列电极与公共电极并形成一条带有一定阻值的导电通路,且阻值的大小与压力大小成反比,压阻层材料可选用velostat导电薄
膜,其具有优良的压阻特性,将其裁剪成与电极层相同的形状。
28.在本发明的一种具体实施例中,预压垫片采用硅胶预压垫片,采用预压垫片可以使得传感器具有一定的初始预压力,从而可有效缩短响应时间,提高灵敏度。
29.在本发明的一种具体实施例中,硅胶触点层采用硅胶及玻璃微珠的混合物制得,以极大提高传感器灵敏度。
30.实施例:
31.本实施例提供一种具有多点触觉感知的灵巧手指尖设计,其结构如图1所示:该指尖包括阵列式排布的压阻式触觉传感单元,该传感单元包括作为基板的聚酰亚胺薄膜、附着于基板上的公共端电极和阵列电极、固定于基板上方的压阻层、用于固定基板与压阻层的塑封层、附着于塑封层上方的预压垫片、固定于预压垫片上方的硅胶触点层和将传感单元整体封装的指尖基座与指尖夹板。
32.在图1的指尖结构中,阵列排布的压阻式柔性阵列触觉传感单元中的电极结构示意图如图2所示:在基板上附着公共端电极与3
×
3排布的阵列式电极,其中公共端电极8用于接地,阵列式电极9连接多路复用开关,通过分时复用的方法轮流接正极。
33.指尖基座的右视图如图3所示,在基座底部设计两道滑槽用于与指尖夹板以卡扣的形式固定,此种固定方式省去了连接件且安装拆卸简单。
34.作为一种改进方式,在基板上还具有各个电极的电性引出部,将各个压力传感单元的电极引出至外部,便于每个压力传感单元与外界进行电路连接。
35.基于上述结构的压阻式柔性阵列触觉传感器工作原理如下所述:在触觉传感器没有受到压力时,压阻薄膜5仅受到指尖夹板1与指尖基座7之间的初始预压力,此时压阻薄膜的电阻为初始电阻。而当传感器接触到外界物体时,硅胶触点层2的球状触点发生形变,触点将受到的力传导到压阻薄膜5,由于压阻材料的特性,压阻薄膜在受压后电阻减小,电路中的电流因此变大,但由于单片机无法直接测量回路中的电流信号,故在传感单元后串联一个分压电阻r,通过单片机测量其电压反映所受的压力信号。柔性触点所受的压力越大,分压电阻的电压越大,直至压阻材料的电阻达到最小值,此时压力传感单元也达到了压力监测的最大范围。
36.当作用于触觉传感器上的压力释放后,压阻材料中的导电通路会恢复至初始状态,其电阻也会恢复到初始值,触觉传感单元输出的电信号也就恢复了无外界压力时的初始值。
37.由于传感器有多个传感触点形成阵列,为了节省单片机采集外设占用,采用多路复用器对采集单元进行循环选通,多路复用器单独输入端接电源正极,多路输出端接各个传感单元,因此每次采集时均有一个传感单元形成完整的采集回路。由于单片机的时钟频率极高,因此近乎于可以视作对所有传感单元进行同时采集。
38.另一方面,本实施例还提供了一种上述传感器的制备方法,首先制备电极层在聚酰亚胺薄膜基板上使用金属喷溅的方法喷溅铜薄膜,形成如图4布局的公共电极和阵列电极,并且用同样的方法喷溅构成各个电极的引出部。
39.然后将压阻层和电极层进行封装,在电极基板下方以及压阻薄膜上方均覆盖塑封薄膜,之后在塑封机的加热下,塑封薄膜受热粘连并使电极基板与压阻材料完全贴合。
40.接下来制备柔性触点层2与硅胶预压垫片3,两者分别采用模具a和b进行注塑,采
用ecoflex0030双组份液态铂金硅胶。将按照1:1比例调配的双组份室温固化铂催化硅橡胶混合注入a、b模具中,a模具具有半球状空腔阵列,b模具为膜状空腔,在0.1mpa的负压下抽离铂催化硅橡胶中的气泡并保持5分钟,然后将内含硅胶的模具放入烘箱中在50℃下加热2小时,最后将模具取出并进行冷却脱模即完成柔性触点和预压垫片的制备。在制备柔性触点时,在混合均匀的硅胶中加入质量分数为5%的玻璃微珠进行混合后再注入a模具,这样制得的柔性触点能够具有更优异的弹性模量,可提高传感器的灵敏度。
41.通过图4可看出,在没有加装预压垫片时的传感器压力特性曲线可大致分为3个阶段,第一阶段与第三阶段的灵敏度较高,但中间阶段的灵敏度较低,且三个阶段的线性度很低,难以用常见的线性或多项式曲线拟合。因此,为了跳过第一、第二阶段,在传感器内部加装预压垫片,可看出在有预压力时的传感器压力特性曲线近似于一个二项式曲线且灵敏度较高。
42.基于上述结构及制备方法的指尖压力传感器具有以下优势:(1)集成度高且体积小,安装时无需额外任何连接件。(2)所述指尖传感器可实现对多点接触力的检测且制造成本较低;(3)通过硅胶预压垫片可以使传感器具有一定的初始预压力,跳过初始阶段的非线性区间;(4)硅胶触点层中加入一定量的玻璃微珠,提高了触点层的弹性模量,使得传感器在接触物体时接触力能更好地传到传感单元,提升了传感器的灵敏度。
43.应当说明的是,上述实施例仅是对本发明的优选实施例及原理进行了详细说明,对本领域的普通技术人员而言,依据本发明提供的思想,在具体实施方式上会有改变之处,而这些改变也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1