一种用于模块化机器人连接的快速连接装置
1.本发明涉及模块化机器人技术领域,具体为一种用于模块化机器人连接的快速连接装置。
背景技术:
2.随着机器人技术的不断发展,机器人已开始逐渐步入人们的家庭,为了使机器人具有更强的环境适应性,步入家庭的服务机器人将不再是传统的特种机器人,而是适应能力更强的通用型模块化机器人,为满足不同用户家庭的使用需求,机器人需具备较高的可重构效率,然而当前市面上的模块化机器人产品只注重于驱动关节上的模块化,连接结构仍然为传统的法兰连接结构,可重构效率低,难以满足用户的个性化重构需求。因此,研究一种用于模块化机器人结构连接的快速连接装置,将进一步满足人们对模块化机器人的使用需求。
3.公布号为cn110253541a的发明专利公开了“一种机器人模块快换接口”,该快接装置包括连接外壳、设于连接外壳的连接盘和卡槽,设于连接盘外缘的卡檐,防脱出结构,所述卡檐和卡槽在所述连接盘上至少设有两组,且为非对称布置,当装置进行连接时,由一组装置的卡檐与另一组装置的卡槽嵌合、一组装置的卡槽与另一组装置的卡檐嵌合,实现机械连接,所述防脱出结构用于限制已嵌合结构回转脱出,保证连接可靠且不易脱离。上述发明专利方案结构简单,连接方式简便。但是,上述专利方案尚且存在以下不足:卡槽式连接结构需要通过装置对齐旋合完成嵌合连接,防脱出装置初试位置即为防脱出位置,故要完成连接需要先手动式防脱出装置移至接合位置,再进行接头旋合,接合过程依旧未能达到一步接合的效果,为此我们提出了一种用于模块化机器人连接的快速连接装置。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种用于模块化机器人连接的快速连接装置,解决了上述的问题。
6.(二)技术方案
7.为实现上述所述目的,本发明提供如下技术方案:一种用于模块化机器人连接的快速连接装置,包括装配在一起的凹接头与凸接头,所述凹接头包括凹接头顶盖、与凹接头顶盖连接的凹接头基体、与凹接头顶盖连接的传动结构以及与传动结构连接的解锁装置,传动结构位于凹接头基体的内部,解锁装置插接在凹接头基体的内部;
8.凸接头包括装配在凹接头基体底部凹陷区域的凸接头顶盖、与凸接头顶盖连接在一起的凸接头基体、设置在凸接头基体内部的旋转结构以及锁紧结构。
9.优选的,解锁装置包括解锁轴、小锥齿轮、紧定螺钉、第二轴套、第二轴承、套杯、第三轴套、套杯调整垫片、轴承盖以及解锁旋钮,套杯插接在凹接头基体上,套杯内部固定安装有两个第二轴承,套杯内部穿插有解锁轴,解锁轴延伸到凹接头基体内部一端通过紧定
螺钉固定安装有小锥齿轮,解锁轴位于两个第二轴承之间的区域套接第三轴套,套杯位于凹接头基体外侧一端的台阶面处设置套杯调整垫片,套杯位于凹接头基体的一端固定安装有轴承盖,解锁轴末端安装解锁旋钮。
10.优选的,传动结构包括大锥齿轮、第一轴套、凹接头主轴以及普通圆头平键,凹接头主轴通过轴承设置凹接头顶盖上的圆形孔洞中,凹接头主轴下端通过普通圆头平键连接大锥齿轮,大锥齿轮与小锥齿轮啮合,凹接头主轴上套接第一轴套,凹接头基体上开设有圆形孔洞,圆形孔洞的内部固定安装有第一轴承,第一轴承的内轴处设置有锥轴块。
11.优选的,旋转结构包括卡盖、三段台阶面的凸接头芯轴、第四轴承、锥孔块、压力弹簧以及第五轴承,卡盖设置在凸接头顶盖上,凸接头芯轴通过第四轴承与卡盖和凸接头顶盖连接在一起,凸接头芯轴内部具有正六边形内孔结构,锥轴块延伸到凸接头芯轴的内部,所述锥孔块的上部为圆轴结构下部为正六边轴结构,锥孔块可沿所述凸接头芯轴的内孔作直线移动,锥孔块的底部与凸接头芯轴内孔的底部之间安装有压力弹簧,卡盖中心处有通孔,锥孔块延伸到通孔中与锥轴块贴合,锥轴块旋转的时候会带动锥孔块旋转,凸接头芯轴的下端与凸接头基体之间通过第五轴承连接。
12.优选的,锥轴块与锥孔块的接触面为圆锥面。
13.优选的,锁紧结构包括六个具备有台阶面的紧锁销、复位弹簧以及连杆,所述凸接头基体上开设有六个具有台阶面的圆形孔洞,凹接头基体对应具有台阶面的圆形孔洞位置上开设有销轴孔,紧锁销插接在具有台阶面的圆形孔洞中,复位弹簧设置在具有台阶面的圆形孔洞以及紧锁销的两个台阶面之间,所述紧锁销的末端与凸接头芯轴通过连杆铰接在一起。
14.优选的,凹接头基体的安装入口边缘处为斜面结构。
15.(三)有益效果
16.与现有技术相比,本发明提供了一种用于模块化机器人连接的快速连接装置,具备以下有益效果:
17.1、该用于模块化机器人连接的快速连接装置,可快速实现机器人模块之间的快速连接与分离,本装置采用销轴与销孔配合的方式实现紧锁,其中销轴的位置控制仅由一个芯轴完成驱动,通过连杆实现多个销轴的同步伸缩,针对凹凸接头原本分离的问题,采用锥面摩擦的传动方式来实现解锁传动链的连接,实现两接头间的无转角要求连接,使装置连接更加方便快捷。
18.2、该用于模块化机器人连接的快速连接装置,结构巧妙,通过简单的动作即可实现装置的可靠连接与解锁,无需任何工具进行辅助,大大提高模块化机器人的结构重构效率。
附图说明
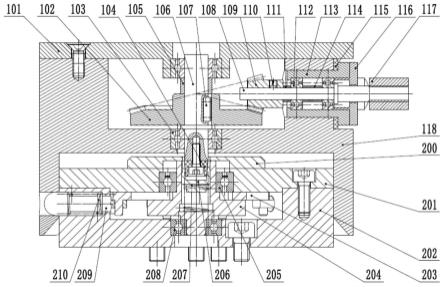
19.图1为本模块化机器人快速连接装置的内部结构示意图;
20.图2为本模块化机器人快速连接装置的整体组合示意图;
21.图3为本模块化机器人快速连接装置的凸接头整体结构示意图;
22.图4为本模块化机器人快速连接装置的凸接头部分内部结构示意图;
23.图5为本模块化机器人快速连接装置的凹接头整体结构示意图。
24.图中:101、凹接头顶盖;102、大锥齿轮;103、第一轴承;104、锥轴块;105、第一轴套;106、凹接头主轴;107、普通圆头平键;108、解锁轴;109、小锥齿轮;110、紧定螺钉;111、第二轴套;112、第二轴承;113、套杯;114、第三轴套;115、套杯调整垫片;116、轴承盖;117、解锁旋钮;118、凹接头基体;200、卡盖;201、凸接头顶盖;202、凸接头基体;203、连杆;204、凸接头芯轴;205、第四轴承;206、锥孔块;207、压力弹簧;208、第五轴承;209、紧锁销;210、复位弹簧。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.请参阅图1-5,一种用于模块化机器人连接的快速连接装置,包括装配在一起的凹接头与凸接头,所述凹接头包括凹接头顶盖101、与凹接头顶盖101连接的凹接头基体118、与凹接头顶盖101连接的传动结构以及与传动结构连接的解锁装置,传动结构位于凹接头基体118的内部,解锁装置插接在凹接头基体118的内部;
27.凸接头包括装配在凹接头基体118底部凹陷区域的凸接头顶盖201、与凸接头顶盖201连接在一起的凸接头基体202、设置在凸接头基体202内部的旋转结构以及锁紧结构。
28.解锁装置包括解锁轴108、小锥齿轮109、紧定螺钉110、第二轴套111、第二轴承112、套杯113、第三轴套114、套杯调整垫片115、轴承盖116以及解锁旋钮117,套杯113插接在凹接头基体118上,套杯113内部固定安装有两个第二轴承112,套杯113内部穿插有解锁轴108,解锁轴108延伸到凹接头基体118内部一端通过紧定螺钉110固定安装有小锥齿轮109,解锁轴108位于两个第二轴承112之间的区域套接第三轴套114,套杯113位于凹接头基体118外侧一端的台阶面处设置套杯调整垫片115,套杯113位于凹接头基体118的一端固定安装有轴承盖116,解锁轴108末端安装解锁旋钮117。
29.传动结构包括大锥齿轮102、第一轴套105、凹接头主轴106以及普通圆头平键107,凹接头主轴106通过轴承设置凹接头顶盖101上的圆形孔洞中,凹接头主轴106下端通过普通圆头平键107连接大锥齿轮102,大锥齿轮102与小锥齿轮109啮合,凹接头主轴106上套接第一轴套105,凹接头基体118上开设有圆形孔洞,圆形孔洞的内部固定安装有第一轴承103,第一轴承103的内轴处设置有锥轴块104,通过旋转解锁旋钮117带动小锥齿轮109旋转,从而带动大锥齿轮102旋转,从而带动锥轴块104旋转。
30.旋转结构包括卡盖200、三段台阶面的凸接头芯轴204、第四轴承205、锥孔块206、压力弹簧207以及第五轴承208,卡盖200设置在凸接头顶盖201上,凸接头芯轴204通过第四轴承205与卡盖200和凸接头顶盖201连接在一起,凸接头芯轴204内部具有正六边形内孔结构,锥轴块104延伸到凸接头芯轴204的内部,所述锥孔块206的上部为圆轴结构下部为正六边轴结构,锥孔块206可沿所述凸接头芯轴204的内孔作直线移动,锥孔块206的底部与凸接头芯轴204内孔的底部之间安装有压力弹簧207,卡盖200中心处有通孔,锥孔块206延伸到通孔中与锥轴块104贴合,锥轴块104旋转的时候会带动锥孔块206旋转,凸接头芯轴204的下端与凸接头基体202之间通过第五轴承208连接。
31.锥轴块104与锥孔块206的接触面为圆锥面。
32.锁紧结构包括六个具备有台阶面的紧锁销209、复位弹簧210以及连杆203,所述凸接头基体202上开设有六个具有台阶面的圆形孔洞,凹接头基体118对应具有台阶面的圆形孔洞位置上开设有销轴孔,紧锁销209插接在具有台阶面的圆形孔洞中,复位弹簧210设置在具有台阶面的圆形孔洞以及紧锁销209的两个台阶面之间,所述紧锁销209的末端与凸接头芯轴204通过连杆203铰接在一起。
33.凹接头基体118的安装入口边缘处为斜面结构。
34.具体工作过程如下:
35.凹接头基体118的安装入口边缘处为斜面结构,凸接头基体202的紧锁销209由于压力弹簧207的作用而保持初始状态为伸出状态,当凹接头基体118与凸接头基体202进行压合时,由于凹接头基体118安装入口斜面的作用,将使紧锁销209简单被压至内缩,随后在未达到凹接头基体118的销轴孔位置前,紧锁销209处于内缩状态,当紧锁销209达到凹接头基体118对应的销轴孔位置时,紧锁销209将由于复位弹簧207的作用而弹出,紧锁销209与凹接头基体118的销轴孔完成配合连接,从而完成装置的紧锁,快接装置连接后效果图参考图2;当凹接头基体118与凸接头基体202完成连接后,凹接头主轴106末端的锥轴块104将与凸接头基体202中锥孔块206紧密贴合,参考图1,锥轴块104与锥孔块206的接触面为圆锥面,凹凸接头连接过程中,锥孔块206会由于锥轴块104的移动而不断被下压,当达到紧锁位置后,此时压力弹簧207产生足够大的反作用力,使锥轴块104与锥孔块206之间产生足够大的摩擦力矩,此时,参考图1,拧动解锁旋钮108即可带动传动链,使凸接头芯轴204旋转,进而带动连杆203使均布的6个紧锁销209内缩,从而完成装置的解锁,随后直接手动将两接头分开即可。
36.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1