一种外骨骼机器人脚踝结构
1.本实用新型涉及外骨骼机器人技术领域,具体是一种外骨骼机器人脚踝结构。
背景技术:
2.外骨骼机器人技术是融合传感、控制、信息、融合、移动计算,为作为操作者的人提供一种可穿戴的机械机构的综合技术。外骨骼机器人是指套在人体外面的机器人,也称“可穿戴的机器人”。在医学上可以帮助病人们进行康复训练。外骨骼机器人都会有供人体脚踝部运动的脚踝结构,脚踝结构可以很好的托住使用者脚踝部并保证二者之间的同步运动。
3.现有技术中,使用者在使用外骨骼机器人时,现有的外骨骼机器人大多采用金属材质制作,没有对使用者的脚踝夹紧保护的结构,使用者的脚踝凸起部与外骨骼机器人容易摩擦破损,且行走时,容易扭伤脚踝,不利用其穿戴的稳定性和安全性。因此,本领域技术人员提供了一种外骨骼机器人脚踝结构,以解决上述背景技术中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种外骨骼机器人脚踝结构,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种外骨骼机器人脚踝结构,包括脚托,所述脚托上部后端设置有弧形挡板,所述弧形挡板内侧设置有弧形充气囊,所述弧形充气囊内侧左右两端均设置有防护垫,每个所述防护垫上设置有多个充气凸点,所述脚托上部前端设置有脚趾套,所述脚托底部设置有脚踏板,所述脚踏板后端左右两侧均设置有连接块,两个所述连接块内设置有转轴,所述转轴上套设有扭簧,所述脚踏板前端上部设置有缓冲弹簧。
7.作为本实用新型进一步的方案:所述弧形挡板与弧形充气囊贴合,且所述弧形充气囊的进气口位于弧形充气囊后端并贯穿弧形挡板设置,所述防护垫上的多个充气凸点与弧形充气囊内部连通,使用时,在对弧形充气囊充气的同时,可使得防护垫上的多个充气凸点鼓起,与使用者脚踝贴合并夹紧。
8.作为本实用新型再进一步的方案:所述扭簧缠绕在转轴,且所述扭簧两端部分别抵触脚踏板上表面和脚托底部,当脚踏板下压地面,通过扭簧使得脚踏板贴合脚托,且使用者抬脚时,通过扭簧的作用,使得脚踏板回复原位。
9.作为本实用新型再进一步的方案:所述缓冲弹簧下端设置有托座,所述缓冲弹簧上端设置有固定板,且所述固定板上设置有多个固定孔,使用者穿戴外骨骼机器人行走时,通过缓冲弹簧对缓冲使用者脚掌对地面的冲击力,提高了其穿戴外骨骼的安全性。
10.作为本实用新型再进一步的方案:所述脚托左侧壁设置有第一母扣,所述第一母扣右侧位于脚托右侧壁设置有弹性绑带,所述弹性绑带左端部下部设置有多个公扣,使用时,将弹性绑带上的公扣卡扣在第一母扣上,使弹性绑带固定并对使用者脚背限位,避免其脱离脚托,且根据不同使用者的脚部大小进行弹性绑带的位置。
11.作为本实用新型再进一步的方案:所述第一母扣右端位于脚托底部设置有多个第二母扣,且多个所述公扣均与第一母扣和第二母扣相匹配,使用时,通过多个第二母扣将弹性绑带固定后露出来的公扣卡扣,避免其坠到地面上被踩坏。
12.作为本实用新型再进一步的方案:所述弧形挡板外端左右两侧均设置有安装座,所述安装座上设置有螺纹安装孔,通过安装座将脚托安装在外骨骼机器人的腿部支撑杆上,便于使用者使用。
13.与现有技术相比,本实用新型的有益效果是:
14.1、本实用新型中,通过弧形充气囊充气将使用者脚后跟和脚踝夹紧,提高了其穿戴稳定性,防护垫上的多个充气凸点与弧形充气囊内部连通,在对弧形充气囊充气的同时,可使得防护垫上的多个充气凸点鼓起,与使用者脚踝贴合并夹紧,通过防护垫的多个充气凸点对脚踝进一步防护,避免使用者在运动时脚踝出现扭伤、磨损等情况出现,有效保证使用者脚踝安全,增加了其实用性。
15.2、本实用新型中,通过弧形挡板将使用者脚后跟抵挡,并将弹性绑带上的公扣卡扣在第一母扣上,使弹性绑带固定并对使用者脚背限位,避免其脱离脚托,提高了穿戴稳定性,且根据不同使用者的脚部大小进行弹性绑带的位置,且通过多个第二母扣将弹性绑带固定后露出来的公扣卡扣,避免其坠到地面上被踩坏,提高了其使用寿命。
附图说明
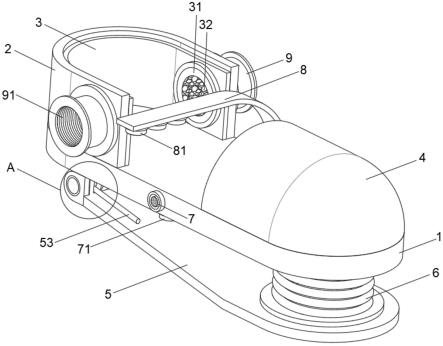
16.图1为本实用新型的结构示意图;
17.图2为本实用新型图1中a的结构放大示意图;
18.图3为本实用新型中缓冲弹簧的结构示意图。
19.图中:1、脚托;2、弧形挡板;3、弧形充气囊;31、防护垫;32、充气凸点;4、脚趾套;5、脚踏板;51、连接块;52、转轴;53、扭簧;6、缓冲弹簧;61、托座;62、固定板;63、固定孔;7、第一母扣;71、第二母扣;8、弹性绑带;81、公扣;9、安装座;91、螺纹安装孔。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1~3,本实用新型实施例中,一种外骨骼机器人脚踝结构,包括脚托1,脚托1上部后端设置有弧形挡板2,弧形挡板2内侧设置有弧形充气囊3,弧形充气囊3内侧左右两端均设置有防护垫31,每个防护垫31上设置有多个充气凸点32,脚托1上部前端设置有脚趾套4,脚托1底部设置有脚踏板5,脚踏板5后端左右两侧均设置有连接块51,两个连接块51内设置有转轴52,转轴52上套设有扭簧53,脚踏板5前端上部设置有缓冲弹簧6,使用时,通过弧形挡板2将脚后跟抵挡,且通过弧形充气囊3充气将使用者脚后跟和脚踝夹紧,提高了其穿戴稳定性,并通过防护垫31的多个充气凸点32对脚踝进一步防护,避免使用者在运动时脚踝出现扭伤、磨损等情况出现,有效保证使用者脚踝安全,增加了其实用性。
22.其中,弧形挡板2与弧形充气囊3贴合,且弧形充气囊3的进气口位于弧形充气囊3
后端并贯穿弧形挡板2设置,防护垫31上的多个充气凸点32与弧形充气囊3内部连通,使用时,在对弧形充气囊3充气的同时,可使得防护垫31上的多个充气凸点32鼓起,与使用者脚踝贴合并夹紧;扭簧53缠绕在转轴52,且扭簧53两端部分别抵触脚踏板5上表面和脚托1底部,当脚踏板5下压地面,通过扭簧53使得脚踏板5贴合脚托1,且使用者抬脚时,通过扭簧53的作用,使得脚踏板5回复原位;缓冲弹簧6下端设置有托座61,缓冲弹簧6上端设置有固定板62,且固定板62上设置有多个固定孔63,使用者穿戴外骨骼机器人行走时,通过缓冲弹簧6对缓冲使用者脚掌对地面的冲击力,提高了其穿戴外骨骼的安全性;脚托1左侧壁设置有第一母扣7,第一母扣7右侧位于脚托1右侧壁设置有弹性绑带8,弹性绑带8左端部下部设置有多个公扣81,使用时,将弹性绑带8上的公扣81卡扣在第一母扣7上,使弹性绑带8固定并对使用者脚背限位,避免其脱离脚托1,且根据不同使用者的脚部大小进行弹性绑带8的位置;第一母扣7右端位于脚托1底部设置有多个第二母扣71,且多个公扣81均与第一母扣7和第二母扣71相匹配,使用时,通过多个第二母扣71将弹性绑带8固定后露出来的公扣81卡扣,避免其坠到地面上被踩坏;弧形挡板2外端左右两侧均设置有安装座9,安装座9上设置有螺纹安装孔91,通过安装座9将脚托1安装在外骨骼机器人的腿部支撑杆上,便于使用者使用。
23.本实用新型的工作原理是:安装时,通过安装座9和螺纹安装孔91将脚托1安装在外骨骼机器人的腿部支撑杆上,便于使用者使用,当使用者穿戴外骨骼时,脚掌放在脚托1上,并使脚趾穿入脚趾套4内,通过弧形挡板2将使用者脚后跟抵挡,将弹性绑带8上的公扣81卡扣在第一母扣7上,使弹性绑带8固定并对使用者脚背限位,避免其脱离脚托1,提高了穿戴稳定性,且根据不同使用者的脚部大小进行弹性绑带8的位置,且通过多个第二母扣71将弹性绑带8固定后露出来的公扣81卡扣,避免其坠到地面上被踩坏,提高了其使用寿命,且通过弧形充气囊3充气将使用者脚后跟和脚踝夹紧,提高了其穿戴稳定性,防护垫31上的多个充气凸点32与弧形充气囊3内部连通,在对弧形充气囊3充气的同时,可使得防护垫31上的多个充气凸点32鼓起,与使用者脚踝贴合并夹紧,通过防护垫31的多个充气凸点32对脚踝进一步防护,避免使用者在运动时脚踝出现扭伤、磨损等情况出现,有效保证使用者脚踝安全,增加了其实用性,扭簧53两端部分别抵触脚踏板5上表面和脚托1底部,当脚踏板5下压地面,通过扭簧53使得脚踏板5贴合脚托1,且使用者抬脚时,通过扭簧53的作用,使得脚踏板5回复原位,使用者穿戴外骨骼机器人行走时,通过缓冲弹簧6对缓冲使用者脚掌对地面的冲击力,提高了其穿戴外骨骼的安全性。
24.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1