一种基于智能运维管理的配电巡检机器人的制作方法
本发明涉及巡检机器人技术,具体为一种基于智能运维管理的配电巡检机器人。
背景技术:
1、运维的意思是:指对大型组织已经建立好的网络软硬件的维护;本质上是对网络、服务器、服务的生命周期各个阶段的运营与维护,在成本、稳定性、效率上达成一致可接受的状态;
2、现有技术中,巡检机器人在进行巡检操作时,须通过拍摄的画面进行巡检位置各处的检查,巡检机器人在进行行进的过程中,易受到路面不平稳的影响,在路面不平稳的地点进行行进时,拍摄的画面易因巡检机器人的抖动发生抖动的情况,使巡检人员无法通过巡检机器人拍摄的画面进行巡检结果的准确判断,给巡检人员的巡检工作造成不良影响,且巡检机器人易因抖动发生歪斜摔倒的情况,摔倒后的巡检机器人与地面碰撞易发生损伤,增大了用户的维护成本;
3、针对上述技术问题,本技术提出一种解决方案。
技术实现思路
1、本发明的目的在于通过巡检机器人履带中的顶边轮在转动过程中带动传输带进行转动,使安装在巡检机器人前方两侧支撑框架内的传输带在传输转动过程中,对路面上的路凸进行清理,使路面在清理后更加的平整,巡检机器人行进的更加的稳定,减小发生抖动的几率,使巡检人员通过巡检机器人拍摄的画面进行巡检结果的准确更加判断,给巡检人员的巡检工作造成不良影响减小,且更加平稳的行进减小了巡检机器人摔倒的可能性,减少用户的维护成本,解决路面不平整造成巡检机器人拍摄画面抖动影响巡检结果,且易导致巡检机器人歪斜摔倒造成损伤影响维护的问题,而提出一种基于智能运维管理的配电巡检机器人。
2、本发明的目的可以通过以下技术方案实现:
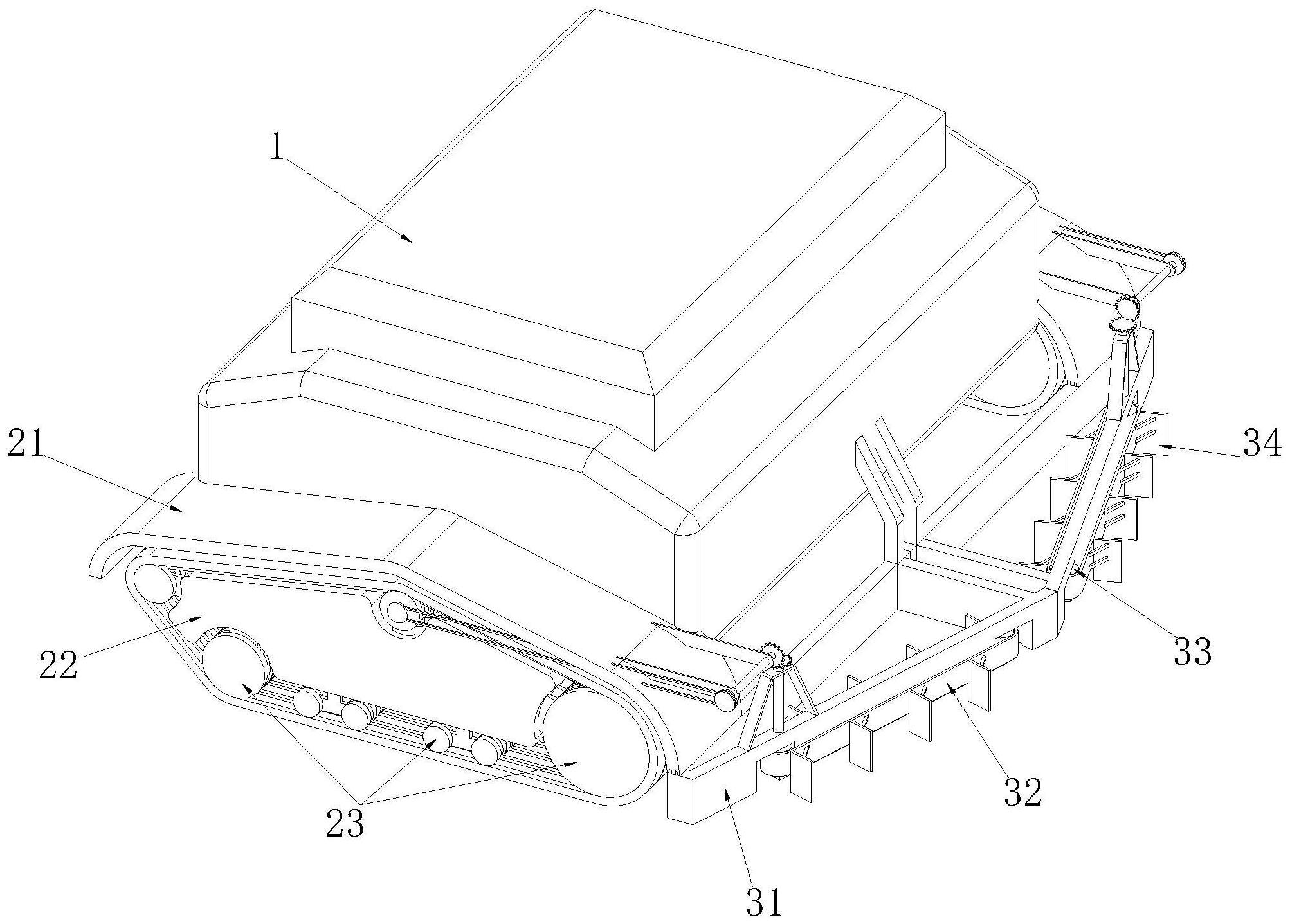
3、一种基于智能运维管理的配电巡检机器人,包括运维管理系统和机器人本体,所述机器人本体外侧壁两侧设置有移动组件,移动组件包括挡泥板,所述机器人本体外侧壁两侧对应所述挡泥板下方安装有驱动箱,所述驱动箱外侧壁下方转动连接有若干个底边轮,所述底边轮外侧安装有外履带,所述驱动箱外侧壁上方转动连接有顶边轮,所述机器人本体外侧壁一侧中间位置处设置有清扫组件,清扫组件包括支撑框架,所述支撑框架下表面开设有安装槽,所述安装槽内侧通过传输辊转动连接有传输带,所述传输带外侧壁连接有若干个均匀分布的刮污板,所述传输带外侧壁对应所述刮污板位置处通过转动座安装有调节杆。
4、作为本发明的一种优选实施方式,顶边轮外侧壁安装有驱动转轮,所述挡泥板上表面对应所述支撑框架位置处通过支撑架一转动连接有连接轴一,所述连接轴一对应所述驱动转轮的一端安装有传动转轮,所述驱动转轮与所述传动转轮通过传动带传动连接,所述连接轴一另一端安装有驱动齿轮,所述支撑框架上表面对应所述传输辊位置处安装有连接轴二,连接轴二上端对应所述驱动齿轮位置处安装有传动齿轮,所述支撑框架上表面对应连接轴二位置处安装有支撑架二。
5、作为本发明的一种优选实施方式,挡泥板上表面对应所述传动带位置处开设有连通孔,所述支撑框架上表面对应所述挡泥板位置处一体成型有连接卡,所述挡泥板下端对应所述支撑框架位置处开设有连接槽,所述支撑框架上表面对应所述机器人本体位置处一体成型有连接架,所述挡泥板下表面对应所述传动带位置处安装有调节推杆,调节推杆下端通过转轮架与所述传动带连接,所述驱动箱内部对应所述底边轮位置处均设置有液压推杆。
6、作为本发明的一种优选实施方式,运维管理系统包括路采单元、分析单元和执行单元;
7、路采单元,对巡检机器人前进方向上的路面情况信息和刮污板受压数据进行采集,并将采集到的路况信息数据传递至分析单元;路况信息数据包括路凸高度数据a、路凸长度数据i、路凸定位数据b、路面宽度数据c和路凸宽度数据c;
8、分析单元,对路采单元传递来的路况信息数据进行处理,生成清扫执行信号、底轮调节信号或道路规避信号,并将生成的清扫执行信号、底轮调节信号或道路规避信号传递给执行单元;
9、执行单元,根据分析单元传递来的清扫执行信号、底轮调节信号或道路规避信号控制机械结构执行对应的操作。
10、作为本发明的一种优选实施方式,分析单元对路采单元传递来的路况信息数据进行处理,处理步骤如下:
11、步骤一:从路采单元处获取路凸高度数据a、路凸定位数据b、路面宽度数据c和路凸宽度数据c,将路凸高度数据a与预设通过高度数据ta进行比较,将路凸宽度数据c与预设通过宽度数据tc进行比较;
12、步骤二:若数据a大于数据ta,分析单元根据路凸定位数据b、路凸宽度数据c和路面宽度数据c计算出路面两侧排除该路凸后可通行的路面通行宽度数据dz和dy,并将数据dz和dy与巡检机器人宽度数据d进行比较,若数据dz和dy中存在一个数据大于数据d,则生成道路规避信号;若数据dz和dy均小于数据d,则对数据dz和dy进行数据大小的对比,使巡检机器人从数据更大的一侧进行通行;
13、步骤三:若数据a小于或等于数据ta,分析单元生成清扫执行信号,使执行单元传递信号控制调节推杆伸长设定的长度,使传动带绷紧带动传输带进行传输转动,使传输带上的刮污板在调节杆的支撑下推动路凸向巡检机器人前进方向的两侧移动;
14、步骤四:刮污板在对路凸进行推动时,路采单元可对刮污板与路凸之间的压力数据f进行采集,预设受压数据为e,若数据f大于或等于数据e,则该路凸在推动作用力作用下无法进行移动,以巡检机器人中心为坐标原点建立二元坐标系判定巡检机器人外履带与路凸的位置,在巡检机器人外履带与路凸有重合时生成底轮调节信号,同时刮污板在调节杆的作用下进行收缩规避,执行单元根据底轮调节信号进行底轮的高度调节;若数据f小于数据e,路凸可在刮污板的推动下移动,不影响巡检机器人的正常前进。
15、作为本发明的一种优选实施方式,执行单元接收底轮调节信号后进行底轮调节的步骤如下:
16、步骤一:路采单元采集路凸与底边轮之间的距离数据,并通过分析单元计算出路凸与底边轮接触的时间,在经过该段时间后,执行单元传递信号控制驱动箱内侧的液压推杆对底边轮的高度进行调节,高度调节的数据大小与路凸高度数据a的大小相同;
17、步骤二:分析单元将路凸长度数据i和路凸宽度数据c分别与外履带接触地面长度数据j和外履带宽度数据k进行比较,使对应外履带在接触路凸时,驱动箱内对应底边轮的液压推杆进行对应的长度调节,并在外履带远离路凸或完全登上路凸时进行长度的伸长调节;
18、步骤三:两侧底边轮连接的液压推杆有一定的倾斜角度,分析单元可通过勾股定理计算出底边轮进行对应高度的调节时,需进行长度的伸缩数据,四个底边轮依次与路凸接触时,对应的底边轮在液压推杆作用下向内进行收缩,并在下一个底边轮与路凸接触时,在下一个底边轮向内收缩时,进行液压推杆长度的复位。
19、与现有技术相比,本发明的有益效果是:
20、1、通过巡检机器人履带中的顶边轮在转动过程中带动传输带进行转动,使安装在巡检机器人前方两侧支撑框架内的传输带在传输转动过程中,对路面上的路凸进行清理,使路面在清理后更加的平整,巡检机器人行进的更加的稳定,减小发生抖动的几率,使巡检人员通过巡检机器人拍摄的画面进行巡检结果的准确更加判断,给巡检人员的巡检工作造成不良影响减小,且更加平稳的行进减小了巡检机器人摔倒的可能性,减少了用户的维护成本;
21、2、巡检机器人在运维管理系统的作用下,在运维管理系统检测到巡检机器人前进方向上存在路凸影响巡检机器人行进的稳定性时,可对路况信息进行采集,先通过清扫单元对路凸进行清扫工作,后判定路凸的高度是否可以通行;若清扫可以解决路凸的阻碍,则巡检机器人直接行进;若清扫无法解决路凸的阻碍且路凸的高度无法通行,则采取巡检机器人行进路线规避操作;若清扫无法解决路凸的阻碍且路凸的高度可以通行,则采取巡检机器人底边轮调节操作;巡检机器人进行路线规避操作时,根据路面宽度、路凸宽度和路凸定位对巡检机器人行进最合理方向进行判断,保证巡检机器人以最稳定的方式行进,使巡检机器人的巡检画面清晰无抖动。
- 还没有人留言评论。精彩留言会获得点赞!