一种挂轨式机器人行走机构及其使用方法与流程
本发明涉及挂轨式机器人,具体为一种挂轨式机器人行走机构及其使用方法。
背景技术:
1、在现有的挂轨式机器人行走机构中,大多数摩擦轮的安装结构较为简单,在使用过程中容易随着摩擦轮的磨损,而使摩擦轮与行走轨道之间存在摩擦力不足的情况,进而导致机器人出现晃动以及行走不准的现象,且现有的挂轨式机器人行走机构在使用时并不具有限位结构,存在一定的缺陷。
2、现有的机器人行走机构存在的缺陷是:
3、1、专利文件cn115026791a,涉及一种便拆卸式配电站点挂轨式机器人行走机构,包括行走轨道、两组取电滑触组件、一组载波滑触组件、定位条形码,机器人本体行走部件;行走轨道为工字型轨道;定位条形码粘贴于行走轨道的侧面;机器人本体行走部件包括行走导向部分、取电通讯部分及定位部分;行走导向部分包括行走机架、行走轮和四组导向轮装置;行走轮紧密贴合于行走轨道下端面上;四组导向轮装置通过上、下导向轮与分别与行走轨道的下翼缘的上、下表面导向配合;取电通讯部分包括两根取电滑触臂和一根载波滑触臂;定位部分包括激光扫码枪。本机构行走稳定性好、取电方便、移动定位准确、具有自卸功能,但是上述公开文件中的挂轨式机器人行走机构主要考虑如何提高其自身的稳定性和移动定位准确性,并没有考虑到现有的挂轨式机器人行走机构在使用时并不具有限位结构的问题,在外界的推动力下容易带动行走机构移动;
4、2、专利文件cn218052601u,涉及智能巡检机器人技术领域,特别是一种挂轨机器人可调抱紧行走机构,包括安装架和行走轨道,所述安装架的两侧均转动连接有一个行走支架,两个所述行走支架的两侧均转动连接有一个第一行走支架轮,两个所述行走支架的两侧均转动连接有一个第二行走支架轮,所述安装架的一侧活动连接有调节组件,所述调节组件的一侧固定连接有一个摩擦轮组件。该实用新型的优点在于:通过橡胶材质的可调压块的设置,摩擦轮发生磨损后,摩擦轮与行走轨道之间的压力会减小,由于可调压块本身处于压缩状态,会由于压力减小有恢复的趋势,进而使调节架以连接轴为轴心向上转动,进而提升摩擦轮与行走轨道之间的压力,以使摩擦轮能够稳定工作,但是上述公开文件中的挂轨机器人可调抱紧行走机构主要考虑如何提高摩擦轮与行走轨道之间的压力,并没有考虑到现有的挂轨式机器人行走机构在使用时稳定性较差的问题;
5、3、专利文件wo2021196178a1,公开了一种智能机器人的行走机构。行走机构包括底部安装板(1)。底部安装板(1)的底部设置有动轮(2),底部安装板(1)的中央形成有中心槽(3),底部安装板(1)的顶部固定连接有固定框架(4),固定框架(4)的内部形成有活动槽(5),活动槽(5)的内部固定连接有第一固定块(6),第一固定块(6)的一侧固定连接有柔性弹簧(7)。一种智能机器人行走机构,通过设置第一机构(9),第一机构(9)包括中心连杆(901)和旋转连接滚轮(902),当机器人在平坦路面上行进时,旋转连接滚轮(902)搭接在底部安装板(1)上不旋转,当机器人爬过障碍物时,旋转连接滚轮(902)在障碍物的支撑下与底部安装板(1)分离,可以旋转,暂时达到旋转连接滚轮的功能,从而有效防止智能机器人卡顿,但是上述公开文件中的智能机器人的行走机构主要考虑如何降低智能机器人行走时卡顿的概率,并没有考虑到现有的挂轨式机器人行走机构在使用时移动的平衡性较差的问题;
6、4、专利文件wo2018129837a1,公开了一种机器人行走机构,包括:保护罩组件(a)和安装座(b),安装座(b)设置在保护罩组件的下侧;外部输入的动力作用于设置在保护罩组件内的第一蜗杆组件(1),并依次传递给设置在安装座上的第一蜗轮组件(2)、第二蜗杆组件(3)、第二蜗轮组件(4)和第三蜗轮组件(7),从而驱动第一机械腿组件(5)、第二机械腿组件(6)和第三机械腿组件(9),完成机器人的线性双向行走运动。通过设置多个“蜗杆-蜗轮”传动机构,可以在单动力输入驱动的条件下实现机器人的线性双向行走运动。本发明结构紧凑简单,运行时能量传输损耗小,故障率低,价格低廉,适用范围广,但是上述公开文件中的机器人行走机构主要考虑如何降低机器人行走机构运行时能量传输损耗,并没有考虑到现有的挂轨式机器人行走机构在使用时并不方便拆装的问题,拆装便捷性较差。
技术实现思路
1、本发明的目的在于提供一种挂轨式机器人行走机构及其使用方法,以解决上述背景技术中提出的问题。
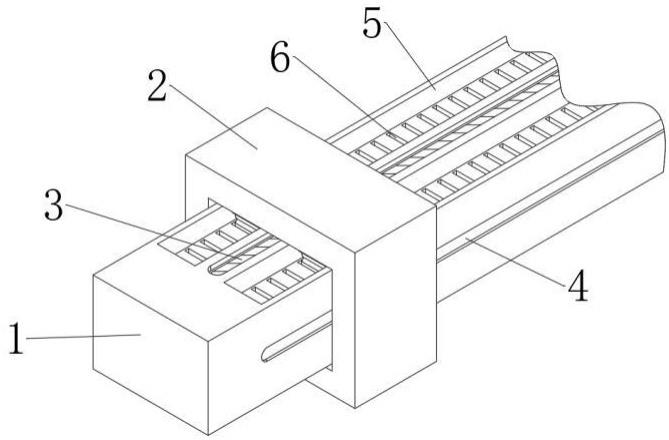
2、为实现上述目的,本发明提供如下技术方案:一种挂轨式机器人行走机构,包括行走轨道,所述行走轨道外表面安装有连接模块,且连接模块用于在行走轨道上移动,所述连接模块包括套接在行走轨道外表面上的连接座,且连接座呈“回”字形结构;
3、所述连接座的顶壁设置有对称布置的置物槽一,两组所述置物槽一的顶壁均安装有微型电推杆一,所述连接座的顶壁安装有对称布置的连接板,且连接板位于置物槽一的两侧,两组所述连接板相互靠近的表面通过轴件安装有滚轮,所述滚轮的外表面安装有均匀布置的凸块;
4、两组所述微型电推杆一的输出端均安装有限位板,且限位板位于凸块的外侧,所述限位板呈倒“凹”字形结构。
5、优选的,所述连接模块的内部安装有定位模块,且定位模块用于对未移动的连接模块进行限位,定位模块包括设置在行走轨道顶部的卡槽,卡槽的底壁安装有铁条,连接座的顶壁设置有置物槽二,且置物槽二位于两组置物槽一的中间,置物槽二的顶壁安装有微型电推杆二,微型电推杆二的输出端安装有连接块,连接块的底部安装有置物板,置物板的底部内嵌安装有电磁铁,置物板位于卡槽的内侧。
6、优选的,所述行走轨道的外表面安装有平衡模块,且平衡模块用于提高连接模块移动时的稳定性,平衡模块包括设置在行走轨道两侧外壁上的滑槽,连接座的两侧内壁均安装有卡块,且卡块位于滑槽的内侧。
7、优选的,所述行走轨道的一端设置有限位模块,且限位模块用于对连接模块进行限位,防止连接模块在移动过程中从行走轨道上掉落,限位模块包括对称设置在行走轨道顶部的置物槽三,卡槽位于两组置物槽三的中间,置物槽三的底壁设置有均匀布置的插孔,插孔的内部嵌合安装有插杆,插杆的顶部安装有挡板,且挡板与置物槽三相嵌合,挡板的背面安装有拉环。
8、优选的,所述行走轨道的内部为中空结构,置物槽三与行走轨道的中空部分相贯通,置物槽三呈“凹”字形结构。
9、优选的,所述行走轨道的内部安装有动力行走模块,且动力行走模块用于带动连接模块移动,动力行走模块包括安装在行走轨道底壁的隔板,隔板的两侧外壁均安装有前后布置的储物箱,两组储物箱的一侧内壁均安装有伺服电机。
10、优选的,两组所述伺服电机的输出端均安装有链轮,且链轮的一端通过轴件与行走轨道的两侧内壁相连接,链轮的外表面啮合连接有链条,且链条位于置物槽三的内侧,链条与凸块相啮合,行走轨道的两侧内壁与储物箱相互靠近的表面安装有支撑块,且支撑块位于两组链轮的中间,支撑块用于承托链条。
11、优选的,所述连接座的底部焊接有安装板,且安装板用于将挂轨式机器人固定在连接座上。
12、优选的,该挂轨式机器人行走机构的使用方法如下:
13、s1、在使用该挂轨式机器人行走机构前,首先根据使用需要将连接座套在行走轨道的一端,使得卡块能够与滑槽对齐,接着推动连接座,带动滚轮转动,使得滚轮表面的凸块能够在链条的表面滚动;
14、s2、在后续使用该挂轨式机器人行走机构时,首先启动置物槽一内的微型电推杆一,接着就能够带动限位板向下移动,使得限位板能够罩住滚轮表面的其中一组凸块,接着就能够通过限位板对凸块进行限位,使得滚轮不再转动;
15、s3、且在使用该挂轨式机器人行走机构的过程中,卡块始终位于滑槽的内部,并通过限位板对凸块进行限位,从而在一定程度上能够提高连接座在行走轨道上移动时的稳定性;
16、s4、当需要使用该挂轨式机器人时,此时伺服电机停止转动,链条停止移动,然后启动置物槽二内的微型电推杆二,使得连接块能够带动置物板向下移动,接着给电磁铁通电,使得电磁铁能够与卡槽内的铁条吸合,从而在一定程度上能够提高连接座在行走轨道上停止移动时的稳定性。
17、优选的,在所述步骤s1中,还包括如下步骤:
18、s11、当推动连接座移动一段距离后,通过插杆和插孔的嵌合拉将挡板对置物槽三的开口端进行限位,从而对连接座起到一定的遮挡作用,接着就能够通过安装板将挂轨式机器人固定在连接座的底部;
19、在所述步骤s2中,还包括如下步骤:
20、s21、然后启动储物箱内的伺服电机,接着就能够带动链轮转动,由于链轮与链条啮合连接,然后就能够带动链条在置物槽三内移动,并随着链条的移动来带动连接座在行走轨道上移动。
21、与现有技术相比,本发明的有益效果是:
22、1、本发明通过安装有连接模块、连接座、置物槽一、连接板、滚轮、微型电推杆一和限位板,在使用该挂轨式机器人行走机构前,再将连接座套在行走轨道的表面后,启动置物槽一内的微型电推杆一,接着就可以带动限位板向下移动,使得限位板能够罩在滚轮表面的其中一组凸块的表面,从而对凸块进行限位,使得滚轮不会在外界的推动力下在链条的表面移动,从而提高连接座安装后的稳定性。
23、2、本发明通过安装有定位模块、铁条、置物槽二、微型电推杆二、连接块、置物板和电磁铁,在使用挂轨式机器人时,连接座不会在行走轨道上移动,与此同时,启动置物槽二内的微型电推杆二,接着就能够在连接块的作用下带动置物板向下移动,并给电磁铁通电,使得电磁铁能够与卡槽内的铁条相吸合,接着就能够牢牢地将连接座固定在行走轨道上,从而在一定程度上能够提高挂轨式机器人使用时的稳定性。
24、3、本发明通过安装有平衡模块、滑槽和卡块,在使用该挂轨式机器人行走机构的过程中,卡块始终位于滑槽的内部,从而在一定程度上能够提高连接座移动时的平衡性,进而降低连接座在移动时晃动的概率。
25、4、本发明通过安装有限位模块、置物槽三、插孔、插杆、挡板和拉环,当需要检修该挂轨式机器人行走机构时,首先向上拉动拉环,然后带动挡板向上移动,使得插杆不再与插孔嵌合,接着就能够将挡板从置物槽内取出,并启动微型电推杆一,使得限位板不再对凸块进行限位,然后就能够推动连接座,使滚轮能够在链条表面移动,接着就能够将连接座从行走轨道的一端取下,从而提高连接座拆装的便捷性。
- 还没有人留言评论。精彩留言会获得点赞!