高空攀爬作业机器人及作业方法与流程
本发明涉及高空作业机器人施工领域,具体为高空攀爬作业机器人及作业方法。
背景技术:
1、钢结构是由钢制材料组成的结构,是主要的建筑结构类型之一。结构主要由型钢和钢板等制成的钢梁、钢柱、钢桁架等构件组成,并采用硅烷化、纯锰磷化、水洗烘干、镀锌等除锈防锈工艺。各构件或部件之间通常采用焊缝、螺栓或铆钉连接。因其自重较轻,且施工简单,广泛应用于大型厂房、场馆、超高层、桥梁等领域。
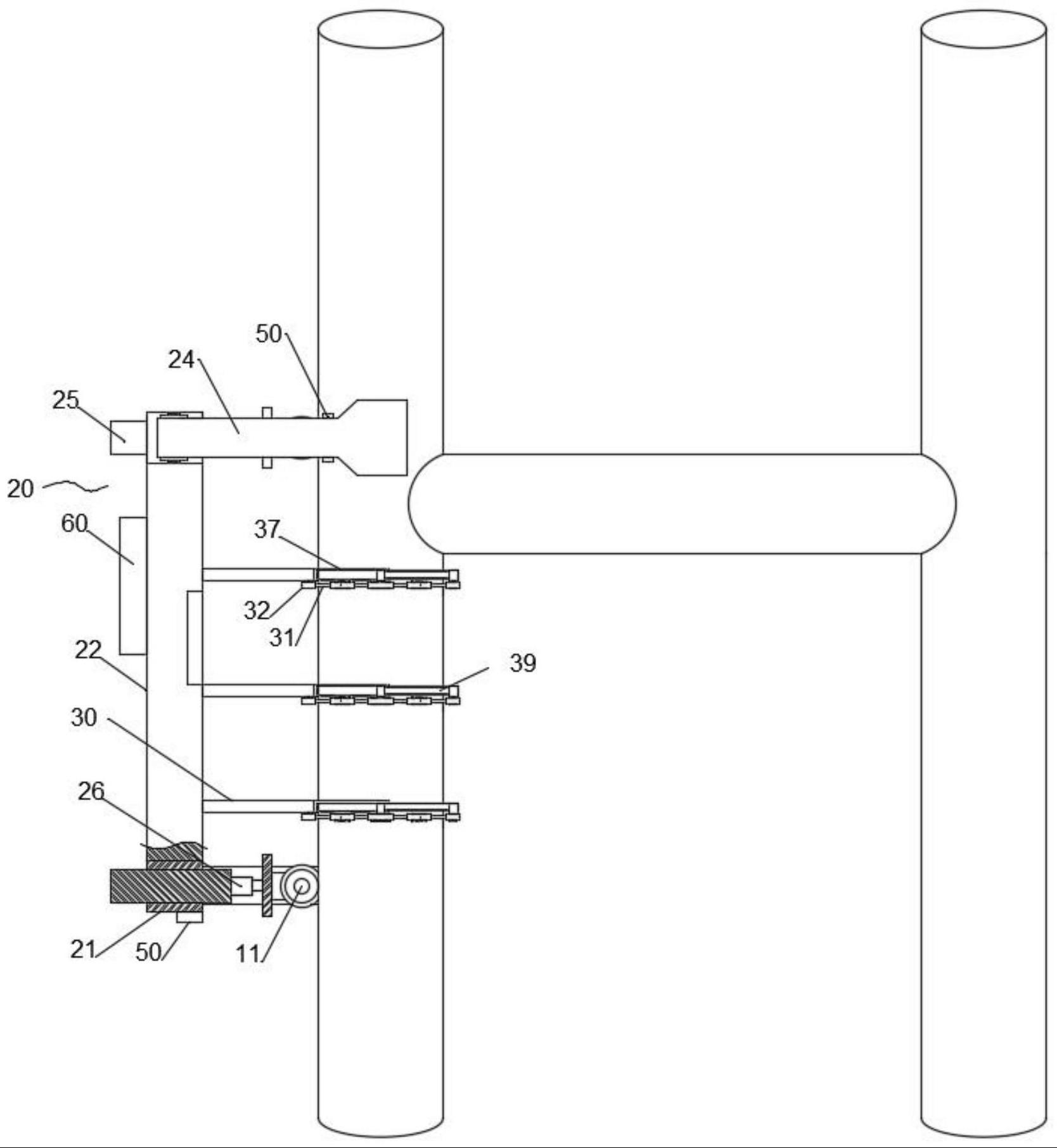
2、针对圆形或柱面钢结构会存在支撑或连接节点,该节点处的作业工作是钢结构施工作业的重点也是难点,如遇到图1所示的情形工况时,但是该节点由于存在异形部分作业区域导致施工作业面明显区别钢结构表面施工作业面,这样就会导致施工难度成倍的增加,往往需要人工进行高空作业。随着技术发展出现一系列高空作业机器人,高空作业机器人均普遍采用攀爬机构和作业执行机构,通过攀爬机构沿钢结构爬行并带动作业执行机构完成高空作业。
3、经检索:cn113478142a公开了一种基于ai视觉识别的高空攀爬式焊接机器人,包括机器臂主体,机器臂主体的上下两端均设有连接架,且连接架分别通过旋转控制机构和安装座连接,旋转控制机构用于驱动机器臂主体和安装座的翻转,实现攀爬;安装座的侧边设有用于进行视觉识别的图像采集器,且安装座的侧边还设有用于夹持构筑物的夹持部,机器臂主体的中部外侧设有焊接机构。
4、该技术虽然能够完成对钢结构周向工作但是无法完成上述异形部分作业区域的施工作业。
技术实现思路
1、本发明所要解决的技术问题是:圆形或柱面钢结构表面节点异形作业区域,作业难度大且现有攀爬机器人无法有效针对该异形作业区域完成作业的难题。
2、为了解决上述技术问题,发明人经过实践和总结得出本发明的技术方案,本发明采用了如下技术方案:
3、高空攀爬作业机器人的作业执行机构,包括执行机构,执行机构包括固定座,固定座安装于机构本体上,固定座上安装有两组对称布设的执行单元,每组执行单元均包括至少两个执行联动杆,每个执行联动杆的两端均固定安装有传动体,两组执行单元上相邻的两个传动体均转动安装于固定座上,且两个传动体形成传动配合,位于同一组执行单元中的两个相邻传动体形成传动配合且该两个传动体共同安装有移动座,移动座包括连接座一和连接座二,连接座一和连接座二交错布设且连接座一靠近固定座布设;
4、导向架,导向架安装于连接座二上,导向架远离连接座二的一端活动连接于固定座上,且导向架相对固定座旋转运动;
5、作业执行件,作业执行件安装于导向架上且靠近钢结构表面布设。
6、更进一步优选地方案,所述固定座上设置有沿靠近钢结构方向自由延伸的导向结构,导向结构适于导向架导向,导向结构正对钢结构的一侧设置有移动组件。
7、更进一步优选地方案,所述导向结构包括圆心角小于等于°的圆弧段,圆弧段两端均设置有导槽,导槽内部活动安装有圆弧板,圆弧板适于在导槽内相对滑动,圆弧板内安装有连接块,连接块适于与对应的导向架连接固定,位于最外侧导向架上的连接块和圆弧板固定连接。
8、更进一步优选地方案,所述导向架上安装有转向件和接触件,转向件为弧形结构的杆件,接触件自由端设置有贴合于钢结构表面的牛眼轴承,转向件适于在接触钢结构时带动导向架沿导向结构围绕钢结构相对偏转,牛眼轴承适于导向架沿钢结构表面运动;
9、传动体和移动座转动安装,且传动体均为齿轮结构。
10、高空攀爬作业机器人,包括:
11、爬行机构,爬行机构用于沿钢结构爬行;
12、机构本体,机构本体用于固定爬行机构;
13、执行机构,执行机构为如权利要求至任一项所述的执行机构。
14、更进一步优选地方案,所述机构本体包括水平杆和竖向杆,水平杆设置有两组分别固定于竖向杆的两端,固定座位于两个水平杆之间,竖向杆上设置有吸附结构,水平杆两侧转动安装有连杆且连杆的自由端转动安装有夹持板,夹持板用于夹持钢结构表面,水平杆的中部设置有竖向通孔,竖向通孔的内部活动安装有径向杆,径向杆贯穿水平杆并安装有电动伸缩杆件,位于电动伸缩杆件和水平杆之间的径向杆上转动安装有施压杆,施压杆的自由端转动安装于夹持板上。
15、更进一步优选地方案,所述爬行机构包括安装于电动伸缩杆件端部的主行走轮和安装于夹持板内侧的副行走轮,两个副行走轮呈八字形分布,两个副行走轮相对主行走轮倾斜布设;
16、电动伸缩杆件完全内收后经施压杆带动两个副行走轮外移脱离钢结构表面。
17、更进一步优选地方案,所述执行机构至少设置有一组,作业执行件为钢结构表面除锈的清理机构或焊接钢结构的焊接机构或焊缝质量检测用的探伤机构或喷涂防腐涂料的喷涂机构。
18、更进一步优选地方案,所述清理机构包括带有负压收集粉尘效果的清理刷和吹扫结构,吹扫结构包括安装于清理刷上的吹扫件以及通过管道为吹扫件提供高压气体的气源,气源固定于机构本体上,吹扫件的出气口设置有多个呈周向等间距分布设置的保护气道,多个保护气道的旋向均一致,保护气道排出的气体在吹扫件喷射出的高压气体外侧形成涡旋状保护层。
19、更进一步优选地方案,所述机器人还包括图像采集模组、控制模组和无线控制终端,控制模组适于控制爬行机构沿钢结构爬行和电动伸缩杆件的自由端外伸和内收,图像采集模组设置有两组分别安装于对应的夹持板上,图像采集模组用于采集钢结构表面节点障碍信号并实时反馈于控制模组,当控制模组接收到采集的障碍信号时对应处的电动伸缩杆件的自由端内收带动副行走轮外旋脱离钢结构表面,当控制模组接收到采集的无障碍信号时对应处的电动伸缩杆件的自由端外伸带动副行走轮内旋夹持钢结构表面。
20、更进一步优选地方案,所述竖向杆包括位于两端的端部杆体和位于两端端部杆体之间的柔性关节,柔性关节包括中部杆体和安装于中部杆体端部的伺服电机,中部杆体端部设置有u形叉,伺服电机安装于u形叉的外侧,且伺服电机的输出端安装有驱动轴,驱动轴转动安装于u形叉处,且驱动轴和端部杆体固定安装。
21、高空攀爬作业机器人的作业方法,作业步骤如下:
22、1)设备安装
23、将机构本体经吸附结构临时安装于钢结构表面,此时移动组件贴合于钢结构表面,且机构本体位于钢结构背对节点区域一侧的中部,通过两组电动伸缩杆件带动施压杆将夹持板内旋,并同时将副行走轮夹持于钢结构表面;
24、2)高空爬行
25、启动主行走轮,机构本体沿钢结构表面直线爬行,过程中移动组件始终贴合于钢结构表面,两组执行单元的最外侧的导向架处于贴合状态,导向架相对侧设置有接触开关,二者接触时为常开状态;
26、3)前侧避障
27、位于爬行方向前侧的图像采集模组,采集钢结构表面节点障碍信号并实时反馈于控制模组,当控制模组接收到采集的障碍信号时对应处的电动伸缩杆件的自由端内收带动副行走轮外旋脱离钢结构表面;
28、当控制模组接收到采集的无障碍信号时对应处的电动伸缩杆件的自由端外伸带动副行走轮内旋重新夹持钢结构表面;
29、4)施工作业
30、转向件的自由端先行接触节点障碍钢结构,随着爬行机构沿钢结构表面继续行走,迫使转向件向节点障碍钢结构外侧旋转,接触开关由常开状态转为常闭状态,作业执行件开始工作,经导向架、执行联动件、导向结构完成对作业缝自适应作业处理,在转向件带动导向架外旋,导向架带动圆弧板、连接块相对导向结构上旋,同时执行联动件会经传动体发生联动动作,连接座一前移,当通过障碍点钢结构中部区域后,会自动逐步复位,直至完成作业缝的施工动作;
31、5)后侧避障
32、位于爬行方向后侧的图像采集模组,采集钢结构表面节点障碍信号并实时反馈于控制模组,当控制模组接收到采集的障碍信号时对应处的电动伸缩杆件的自由端内收带动副行走轮外旋脱离钢结构表面;
33、当控制模组接收到采集的无障碍信号时对应处的电动伸缩杆件的自由端外伸带动副行走轮内旋重新夹持钢结构表面;
34、继续在爬行机构作用下沿钢结构表面爬行至下一作业区域,且爬行过程中在吸附结构作用下主行走轮始终贴合于钢结构表面。
35、高空攀爬作业机器人的换向作业方法,换向作业步骤如下:
36、1)设备安装
37、将机构本体经吸附结构临时安装于钢结构表面,此时移动组件贴合于钢结构表面,且机构本体位于钢结构背对节点区域一侧的中部,通过两组电动伸缩杆件带动施压杆将夹持板内旋,并同时将副行走轮夹持于钢结构表面;
38、2)高空爬行
39、启动主行走轮,机构本体沿钢结构表面直线爬行,过程中移动组件始终贴合于钢结构表面,两组执行单元的最外侧的导向架处于贴合状态,导向架相对侧设置有接触开关;
40、3)换向
41、前侧换向:
42、位于爬行方向前侧的图像采集模组,采集钢结构表面节点障碍信号并实时反馈于控制模组,当控制模组接收到采集的障碍信号并同时识别是否为爬行方向正前方的障碍信号,若为,对应处的电动伸缩杆件的自由端内收带动副行走轮外旋完全脱离钢结构表面,则该侧的伺服电机会带动驱动轴和对应端部杆体发生偏转,偏转过程中接触开关始终处于常开状态,位于后侧的主行走轮会继续攀爬,后侧的主行走轮和前侧的伺服电机同时运动,确保前侧的主行走轮会先行接触于爬行方向正前方的障碍处的钢结构表面,随着继续爬行,前侧的执行机构的移动组件接触钢结构表面后,前侧的电动伸缩杆件的自由端外伸会自动带动副行走轮内旋重新夹持爬行方向正前方的障碍处的钢结构表面;
43、后侧换向:
44、位于爬行方向后侧的图像采集模组,采集钢结构表面节点障碍信号并实时反馈于控制模组,当控制模组接收到采集的障碍信号并同时识别是否为爬行方向正前方的障碍信号,若为,对应处的电动伸缩杆件的自由端内收带动副行走轮外旋完全脱离钢结构表面,该侧的伺服电机会带动驱动轴和对应端部杆体发生偏转,偏转过程中接触开关始终处于常开状态,位于前侧的主行走轮会继续攀爬,前侧的主行走轮和后侧的伺服电机同时运动,确保后侧的主行走轮会先行接触于爬行方向正前方的障碍处的钢结构表面,随着继续爬行,后侧的执行机构的移动组件接触钢结构表面后,后侧的电动伸缩杆件的自由端外伸会自动带动副行走轮内旋与前侧爬行机构夹持的同一方向上的钢结构表面;
45、4)前侧避障
46、位于爬行方向前侧的图像采集模组,采集钢结构表面节点障碍信号并实时反馈于控制模组,当控制模组接收到采集的障碍信号时对应处的电动伸缩杆件的自由端内收带动副行走轮外旋脱离钢结构表面;
47、当控制模组接收到采集的无障碍信号时对应处的电动伸缩杆件的自由端外伸带动副行走轮内旋重新夹持钢结构表面;
48、5)施工作业
49、转向件的自由端先行接触节点障碍钢结构,随着爬行机构沿钢结构表面继续行走,迫使转向件向节点障碍钢结构外侧旋转,接触开关会由常开状态转为常闭状态,作业执行件开始工作,经导向架、执行联动件、导向结构完成对作业缝自适应作业处理,在转向件带动导向架外旋,导向架带动圆弧板、连接块相对导向结构上旋,同时执行联动件会经传动体发生联动动作,连接座一前移,当通过障碍点钢结构中部区域后,会自动逐步复位,直至完成作业缝的施工动作;
50、6)后侧避障
51、位于爬行方向后侧的图像采集模组,采集钢结构表面节点障碍信号并实时反馈于控制模组,当控制模组接收到采集的障碍信号时对应处的电动伸缩杆件的自由端内收带动副行走轮外旋脱离钢结构表面;
52、当控制模组接收到采集的无障碍信号时对应处的电动伸缩杆件的自由端外伸带动副行走轮内旋重新夹持钢结构表面;
53、继续在爬行机构作用下沿钢结构表面爬行至下一作业区域,且爬行过程中在吸附结构作用下主行走轮始终贴合于钢结构表面。
54、与现有技术相比,本发明具备以下有益效果:
55、1)本发明采用新型作业执行机构结构,作业执行件正对作业部分设置,利用两组作业执行件在接触到钢结构表面时,由于受阻会向两侧移动,完成作业路径自适应调整,进而实现对该类异形作业部分的施工作业,该类作业可以为钢结构表面除锈、焊接、探伤以及喷涂作业中的一种或多种的组合,该种作业快速且高效、作业质量有保障。
56、2)本发明采用在导向架上设置转向件和接触件,利用转向件迫使作业执行件沿作业区域路线规定执行作业任务,防止作业执行件直接和节点处钢结构发生直接接触,例如焊接工作,通过两侧对称同时焊接作业,能够有效降低焊接应力,作业质量高。
57、3)本发明采用新型爬行机构,爬行机构上的副行走轮呈八字形分布且相对主行走轮倾斜布设,能够有效解决爬行机构在爬行过程种出现角度偏移的问题,同时配合图像采集模组和控制模组使用,能够自动避让障碍点,结合导向结构上设置有移动组件,能够确保机器人整体的稳定爬行效果。
58、4)本发明针对清理机构作出特殊设计,例如采用带有负压收集粉尘功能的清理刷,通过清理刷能够将作业部分的锈层除去并将粉尘收集处理,清理刷采用钢刷材质,由于清理刷会造成作业区域处的钢结构表面在作业缝处极易出现毛刺,但是毛刺会影响后续焊接质量,故此增设适于对作业缝进行去除毛刺和清理锈粉的吹扫件。
59、5)本发明采用导向结构对导向架进行规定活动区域,围绕钢结构外表面运动,利用导向架带动对应的连接块或圆弧板相对导向结构,使得作业执行件在配合爬行机构爬行时并沿钢结构表面做对应的运动,完成自适应作业动作,进而实现对该类异形作业区域的高效合高质量施工作业。
60、6)本发明采用带有柔性关节新型机构本体,通过柔性关节和爬行机构配配合使用,能够完成两种不同爬行方向的切换,进而能够完成整个钢结构的作业处理。
61、7)本发明中的作业执行机构也可以实现对多种不同截面类型的钢结构作业缝的作业工作,在完成该类作业缝时安装作业执行件的结构为弹性伸缩式结构,进而便于适应其作业执行件和作业缝间距变化的条件,在进行该类作业缝需要保证迎着爬行方向具备向后侧突出的迎接点位。
- 还没有人留言评论。精彩留言会获得点赞!