一种两段式折叠智能井盖机器人的制作方法
本技术涉及管道检测领域,具体涉及一种两段式折叠智能井盖机器人。
背景技术:
1、根据地下管线工程的技术特点,为满足其安装设备、日常检修和维护的要求,工程中均沿管线埋设方向按一定间距设置检查井,检查井盖是检查井的主要配备产品,是通往地下设施的出入口顶部的封闭物,凡是安装自来水、电信、电力、燃气、热力、消防、环卫等公用设施的地方都需要安装井盖。随着物联网技术的不断发展,基于物联网技术的智能井盖得到应用,现有的智能井盖是通过在井盖上设置电子锁、传感器等来实现对井盖和井口的异常情况检测并发出报警信息的功能,包括对井口水位、水压、流速、有毒气体检测、防盗等检测功能。
2、传统井盖下方的管道检测,一方面采用人工的方式进行,即检测人员通过一根很长的杆件与潜望镜相连接,通过双手握持杆件将潜望镜下放到合适位置,以实现对窨井下方的管网进行检测,此种方式下,增加了检测工人的劳动强度的同时,还需要对道路进行封锁,也增加了城市某片路段的通行压力,造成城市道路的拥堵。另一方面,通过在井盖本体上设置钢丝升降结构,以通过钢丝控制升降的方式,存在控制不稳定的问题;以及通过在井盖本体上固定设置电动伸缩杆来控制升降的方式,由于电动伸缩的设置位置固定,因此存在检测盲区,且电动伸缩杆在使用过程中也存在着质量大、体积大、行程短等缺点。
3、而如何提供一种新的两段式折叠智能井盖机器人,在减少窨井内检测盲区的同时,满足不同深度窨井的检测需求,是本领域亟需解决的技术难题。
技术实现思路
1、针对上述存在问题,本实用新型旨在提供一种两段式折叠智能井盖机器人,至少解决上述至少一种技术问题。
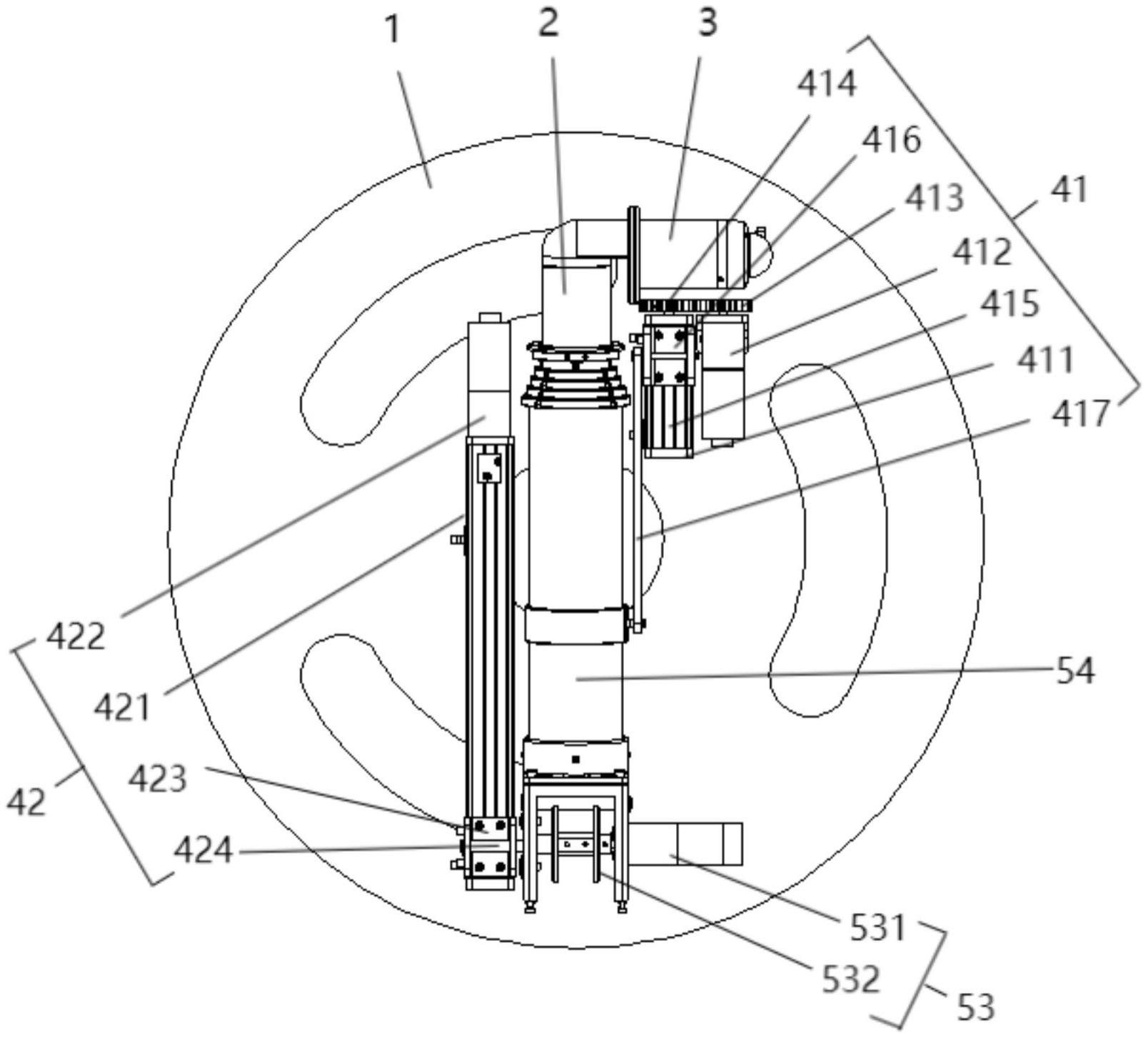
2、为至少解决上述技术问题,本实用新型提供了一种两段式折叠智能井盖机器人,包括井盖本体、机械臂和检测模块,所述检测模块固定设置在所述机械臂的一端,所述检测模块用于对地下管道内的缺陷进行检测,所述两段式折叠智能井盖机器人还包括:两段式折叠模块,所述两段式折叠模块包括第一丝杆模组和第二丝杆模组,所述第一丝杆模组与所述第二丝杆模组平行布设于所述井盖本体的下表面;多级伸缩模块,所述多级伸缩模块包括底座、拉丝、传动组件和自由伸缩组件,所述传动组件和所述自由伸缩组件的一端固定于所述底座上,所述拉丝的一端与所述传动组件的输出端固定连接,所述拉丝的另一端与所述自由伸缩组件的另一端固定连接,所述传动组件驱动所述拉丝收紧或释放以带动所述自由伸缩组件沿轴向方向伸缩;其中,所述底座与所述第二丝杆模组活动连接,所述自由伸缩组件的侧壁与所述第一丝杆模组活动连接,所述第一丝杆模组驱动所述多级伸缩模块绕所述底座与所述第二丝杆模组的活动连接部位处转动,所述第二丝杆模组驱动所述多级伸缩模块沿所述第二丝杆模组的布设方向移动;所述自由伸缩组件的另一端与所述机械臂的另一端固定连接。
3、优选地,所述底座包括:第一侧面、第二侧面、第三侧面和第四侧面,所述第一侧面、所述第二侧面、所述第三侧面和所述第四侧面合围形成具有容置空间的立方结构,所述第一侧面、所述第二侧面和所述第三侧面的中心部位处均设置有安装孔,所述第一侧面的安装孔内设置有第一轴承,所述第三侧面的安装孔内设置有第二轴承;其中,所述传动组件与所述第一侧面固定连接,所述自由伸缩组件与所述第二侧面固定连接,所述第二丝杆模组与所述第三侧面活动连接。
4、优选地,所述传动组件包括:第三电机,所述第三电机的本体固定于所述第一侧面上,所述第三电机的转动轴远离本体的一端穿过所述第一轴承置于所述容置空间内;收绳带轴,所述收绳带轴的一端与所述转动轴远离本体的一端固定连接,所述拉丝的一端固定于所述收绳带轴上。
5、优选地,所述自由伸缩组件由若干个伸缩杆由内向外套设而成,且任意相邻的两个所述伸缩杆之间可相对伸缩,每一个所述伸缩杆的一端固定设置有限位环,所述限位环底部内侧壁环绕设置有第一凸台,所述第一凸台上设置有限位块,每一个所述伸缩杆的另一端的外侧壁环绕设置有第二凸台,相邻的两个所述伸缩杆之间通过所述第一凸台和所述第二凸台限制伸缩位移;其中,所述自由伸缩组件中最外侧的伸缩杆的顶端与所述第二侧面的下表面固定连接,所述自由伸缩组件中最内侧的伸缩杆的底端分别与所述机械臂和所述拉丝固定连接。
6、优选地,每一个所述伸缩杆的侧壁从所述伸缩杆的一端至所述伸缩杆的另一端开设有贯穿槽,每一个所述贯穿槽内对应穿设有所述限位块。
7、优选地,所述第一丝杆模组包括:第一安装座,所述第一安装座固定布设在所述井盖本体的下表面;第一丝杆电机,所述第一丝杆电机固定布设在所述井盖本体的下表面;第一齿轮,所述第一齿轮固定布设于所述第一丝杆电机的螺杆远离所述第一丝杆电机本体的一端;第二齿轮,所述第二齿轮与所述第一齿轮相啮合;丝杆,所述丝杆的一端与所述第二齿轮的轴心部位处固定连接,所述丝杆的另一端与所述第一安装座活动连接;第一传动滑块,所述第一传动滑块上设置有贯穿的第一螺纹通道,所述第一螺纹通道与所述丝杆相适配,所述第一传动滑块通过所述第一螺纹通道套设在所述丝杆上;传动连杆,所述传动连杆的一端与所述第一传动滑块活动连接,所述传动连杆的另一端与所述自由伸缩组件中最外侧的所述伸缩杆的侧壁活动连接。
8、优选地,所述第一安装座包括第一固定部、第一限位部和第一滑道,所述第一固定部和所述第一限位部分别布设于所述第一滑道的两端,所述第二齿轮固定安装于所述第一固定部,所述丝杆的另一端穿过所述第一传动滑块与所述第一限位部固定连接,所述丝杆驱动所述第一传动滑块在所述第一滑道上滑动。
9、优选地,所述第二丝杆模组包括:第二安装座,所述第二安装座固定布设在所述井盖本体的下表面,并与所述第一安装座平行布设;第二丝杆电机,所述第二丝杆电机固定布设在所述第二安装座上;第二传动滑块,所述第二传动滑块上设置有贯穿的第二螺纹通道,所述第二螺纹通道与所述第二丝杆电机的螺杆相适配,所述第二传动滑块通过所述第二螺纹通道套设在所述第二丝杆电机的螺杆上;连接轴,所述连接轴的一端与所述第二传动滑块固定连接,所述连接轴的另一端与所述第三侧面活动连接。
10、优选地,所述第二安装座包括第二固定部、第二限位部和第二滑道,所述第二固定部和所述第二限位部分别布设于所述第二滑道的两端,所述第二丝杆电机的本体固定安装于所述第二固定部,所述第二丝杆电机的螺杆远离所述第二丝杆电机的本体的一端布设于所述第二限位部,所述第二传动滑块在所述第二滑道上滑动;其中所述第一滑道的长度小于所述第二滑道的长度。
11、优选地,所述拉丝由柔性的金属材料制作而成。
12、有益效果:
13、本实用新型提供的一种两段式折叠智能井盖机器人,将第一丝杆模组和第二丝杆模组平行布设于井盖本体的下表面,将多级伸缩模块设置为分别与第一丝杆模组和第二丝杆模组活动连接,以通过第一丝杆模组驱动多级伸缩模块绕其与第二丝杆模组的活动连接部位处转动,通过第二丝杆模组驱动多级伸缩模块沿第二丝杆模组的布设方向移动,使得多级伸缩模块可折叠至井盖本体下方,便于携带,同时还可以通过第一丝杆模组和第二丝杆模组,将多级伸缩模块移动至井盖本体的底部中心位置处,避免在使用过程中使得多级伸缩模块位于井盖下方管道的边缘位置处,进而可以减少井盖下方管道内的检测盲区;将多级伸缩模块设置为包括底座、拉丝、传动组件和自由伸缩组件,通过驱动传动组件正向转动,使得拉丝缠绕于传动组件的输出端以收紧拉丝,进而驱动自由伸缩组件沿轴向方向收缩,通过驱动传动组件反向转动以释放拉丝,自由伸缩组件在自身重力作用下依据释放的拉丝长度而伸长,以此驱动检测组件沿轴向方向伸缩以满足不同深度窨井的检测需求。本实用新型可以提供一种新的两段式折叠智能井盖机器人,以达到减少窨井内检测盲区、满足不同深度窨井的检测需求的技术效果。
14、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其它目的、特征和优点能够更明显易懂,以下特举本实用新型的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!