蛇形机械装置
本技术涉及机械运动,具体而言,涉及一种蛇形机械装置。
背景技术:
1、蛇形机械装置是一种能够模仿生物蛇运动的新型仿生机械装置,这种机械装置通常被用于在狭小空间内执行任务,例如在灾害现场进行搜救。由于其独特的结构,蛇形机械装置可以在狭小的空间中自由移动,从而扩大搜索范围,提高搜救效率。此外,蛇形机械装置还可以用于基础设施和工厂设备检查等工业领域,以及在难以到达的地方进行探测和操作。
2、目前通常需要在蛇形机械装置的内部设置震动马达,以使其产生一定频率的震动,从而推动机械装置向前移动,驱动耗能较高且马达占用空间较大,导致蛇形机械装置的成本较高且体积较大,无法适用于多种应用场景。
技术实现思路
1、有鉴于此,本技术实施例的目的在于提供一种蛇形机械装置,以改善现有技术中存在的蛇形机械装置驱动成本较高且体积较大的问题。
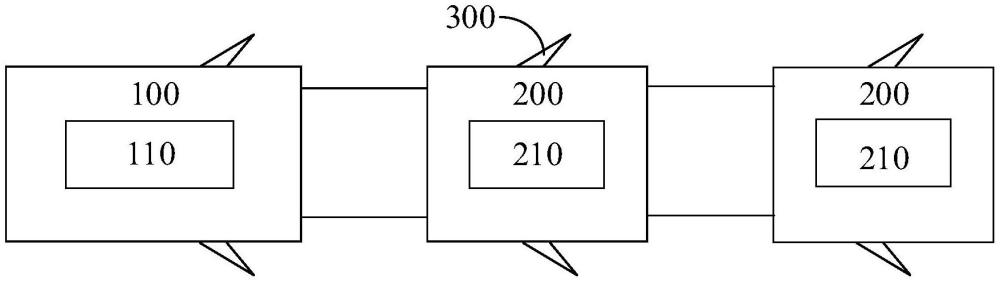
2、为了解决上述问题,本技术提供了一种蛇形机械装置,所述蛇形机械装置包括:头部构件和至少一个身体构件;
3、所述头部构件和第一个所述身体构件柔性连接,多个所述身体构件之间柔性连接;
4、所述头部构件中设置有第一磁铁,所述身体构件中设置有第二磁铁,所述构件通过所述第一磁铁和所述第二磁铁的相互吸引/排斥牵引第一个所述身体构件进行蛇形运动,多个所述身体构件之间通过多个所述第二磁铁的相互吸引/排斥进行蛇形运动;
5、所述头部构件和所述身体构件上设置有多个倒刺结构,所述倒刺结构用于限制所述身体构件进行单向运动。
6、在上述实现过程中,在蛇形机械装置中的头部构件和多个身体构件中设置了相应的磁铁代替马达等器件,以使用磁力代替震动作为蛇形机械装置前进的驱动力,通过头部构件牵引后续的身体构件,从而实现蛇形运动。并且,为了控制蛇形机械装置进行单向的蛇形运动,减少蛇形机械装置倒退、后滑等不利情况,在头部构件和身体构件上设置了相应的倒刺结构,以对蛇形机械装置的运动方向进行限制。有效地减小了蛇形机械装置驱动的耗能以及装置的成本和体积,且保证了蛇形机械装置的前行运动的有效性,适用于多种搜救、检查等应用场景。
7、可选地,其中,所述头部构件包括转向构件和牵引构件;
8、所述转向构件与所述牵引构件通过弹性组件连接。
9、在上述实现过程中,头部构件中可以包括控制方向的转向构件,以及与转向构件连接的用于牵引后续身体构件的牵引构件,以实现转向和牵引功能。
10、可选地,其中,所述转向构件包括:转向外框结构;所述第一磁铁包括:方向磁铁组;
11、所述方向磁铁组设置在所述转向外框结构的内部;
12、所述转向外框结构的横截面为等边多边形,所述转向外框结构上具有n个大小相同的方位面;其中,n由运动方向的数量确定;
13、每个所述方位面上设置有至少一个轮结构。
14、在上述实现过程中,转向构件可以包括具有多个方位面、呈现等边多边体形状的转向外框结构。每个方位面表征不同的运动方向,第一磁铁中的方向磁铁组设置在转向外框结构中,且每个方位面上设置相应的轮结构,以通过方向磁铁组确定相应的目标运动方向,从而调整至对应的方位面,以其上设置的轮结构实现方向控制和牵引。
15、可选地,其中,所述方向磁铁组包括多个电磁铁;所述电磁铁的数量与所述方位面的数量相同;
16、每个所述电磁铁设置在对应的所述方位面内部的运动区域处;
17、所述转向构件用于通过改变部分所述电磁铁的磁极方向,确定未改变磁极方向的所述电磁铁对应的所述方位面指向的运动方向为目标运动方向,以控制所述头部构件使用所述目标运动方向对应的所述方位面上的所述轮结构进行运动。
18、在上述实现过程中,为了实现多方位的转向功能,电磁铁的数量可以与方位面的数量相同,且每个电磁铁都设置在相应的方位面内部对应的运动区域处,以将电磁铁与方位面进行关联,通过改变电磁铁的极性,确定未改变磁性的电磁铁对应的方位面指向的运动方向为目标运动方向,从而控制头部构件以使用该方位面上对应的轮结构,朝向目标运动方向进行运动。能通过改变电磁铁的磁极方向以控制运动的方向,再通过对身体构件的牵引实现完全转向的蛇形运动,有效地提高了转向的效率和成功率。
19、可选地,其中,所述第一磁铁包括:牵引磁铁;所述牵引构件包括:运动外框结构;
20、所述牵引磁铁设置在所述运动外框结构的内部;
21、所述运动外框结构上具有n个大小相同的第一运动面;
22、所述倒刺结构设置在每个所述第一运动面上;
23、所述牵引磁铁用于基于所述方向磁铁组调整所述运动外框结构运动时的所述第一运动面。
24、在上述实现过程中,为了响应转向构件的控制,牵引构件中也可以设置具有多个第一运动面的运动外框结构,并将第一磁铁中的牵引磁铁设置在运动外框结构的内部,以根据方向磁铁组对牵引磁铁的吸引力,调整运动外框结构运动时的第一运动面,实现相应的转向功能。并且,将倒刺结构设置在每个第一运动面上,使用任意一个第一运动面进行运动,都能够实现防倒退、防后滑的功能。
25、可选地,其中,所述牵引磁铁靠近所述转向构件的第一端设置为永磁体;
26、所述牵引磁铁靠近所述身体构件的第二端设置为电磁铁。
27、在上述实现过程中,为了实现转向和牵引功能,可以将牵引磁铁的两端分别设置为不同的磁铁。将靠近转向构件的第一端设置为永磁体,以在转向时跟随转向构件进行实时地转向,将靠近身体构件的第二端设置为电磁铁,以根据电磁铁和身体构件中第二磁铁的极性实现牵引的蛇形运动。
28、可选地,其中,每个所述身体构件包括:身体外框结构;
29、所述第二磁铁设置在所述身体外框结构的内部;
30、所述身体外框结构上具有n个大小相同的第二运动面;
31、所述倒刺结构设置在每个所述第二运动面上;
32、所述第二磁铁用于基于所述牵引磁铁调整所述身体外框结构运动时的所述第二运动面;
33、所述第二磁铁还用于基于极性变化排斥/吸引其他所述身体构件/头部构件,以控制所述身体构件进行蛇形运动。
34、在上述实现过程中,为了响应头部构件的牵引,身体构件中也可以设置具有多个第二运动面的身体外框结构,并将第二磁铁设置在身体外框结构的内部,以通过第二磁铁,基于牵引磁铁的吸引力调整第二运动面,并根据第二磁铁的极性变化,排斥或吸引其他身体构件或头部构件,实现相应的蛇形运动。并且,将倒刺结构设置在每个第二运动面上,使用任意一个第二运动面进行运动,都能够实现防倒退、防后滑的功能。
35、可选地,所述倒刺结构设置为与安装表面具有预设角度的片状凸起物;
36、所述预设角度的中线延长线指向所述蛇形机械装置运动的反方向区域。
37、在上述实现过程中,为了实现防倒退、防后滑的功能,可以将倒刺结构设置为片状凸起物,并且,将片状凸起物以预设角度设置在安装表面上,预设角度的中线延长线指向蛇形机械装置运动的反方向区域,以在不影响蛇形机械装置正常前行的情况下,保证蛇形机械装置的单向运动,从而减少倒退、后滑带来的不利影响。
38、可选地,所述蛇形机械装置还包括:柔性连接件;
39、所述身体构件与第一个所述身体构件通过所述柔性连接件柔性连接;
40、多个所述身体构件之间通过所述柔性连接件柔性连接。
41、在上述实现过程中,为了实现蛇形运动,可以使用柔性连接件连接头部构件与第一个身体构件,以及后续的多个身体构件,在不影响各个构件的构件结构的情况下实现对各个身体构件的牵引和约束。
42、可选地,其中,所述柔性连接件包括:预设长度的多根牵引绳。
43、在上述实现过程中,可以设置多根牵引绳作为柔性连连接件,以通过牵引绳对各个构件进行牵引和约束,并给予各个构件相应的运动空间。
44、综上所述,本技术实施例提供了一种蛇形机械装置,在各个构件中设置磁铁代替马达等器件,以使用磁力代替震动作为蛇形机械装置前进的驱动力,有效地减小了驱动的耗能以及蛇形机械装置的成本和体积,适用于多种应用场景。
- 还没有人留言评论。精彩留言会获得点赞!