本发明涉及钢结构喷涂,具体涉及钢构件表面喷涂方法、装置、计算机设备及存储介质。
背景技术:
1、随着经济的发展,钢结构产量在逐年上升,同时钢结构的防腐也得到关注;受到建筑特色需求的影响,建筑钢结构已经非标化,使得钢构件无法标准化生产、大规模批量化生产。相比较汽车等行业,钢结构行业喷涂工序机械化、智能化水平还处于起步阶段。使用机器人在线示教编程效率低,每款构件都需要进行人工示教。
2、相关技术中,采用视觉作为机器人的“眼睛”去让机器人识别构件类型,再通过算法模型去规划机器人喷涂运动的轨迹,对装置的通用性要求很高,同时对算法模型深度学习要求很高,难以实现钢结构喷涂。
技术实现思路
1、有鉴于此,本发明提供了一种钢构件表面喷涂方法、装置、计算机设备及存储介质,以解决难以实现钢结构喷涂的问题。
2、第一方面,本发明提供了一种钢构件表面喷涂方法,方法包括:
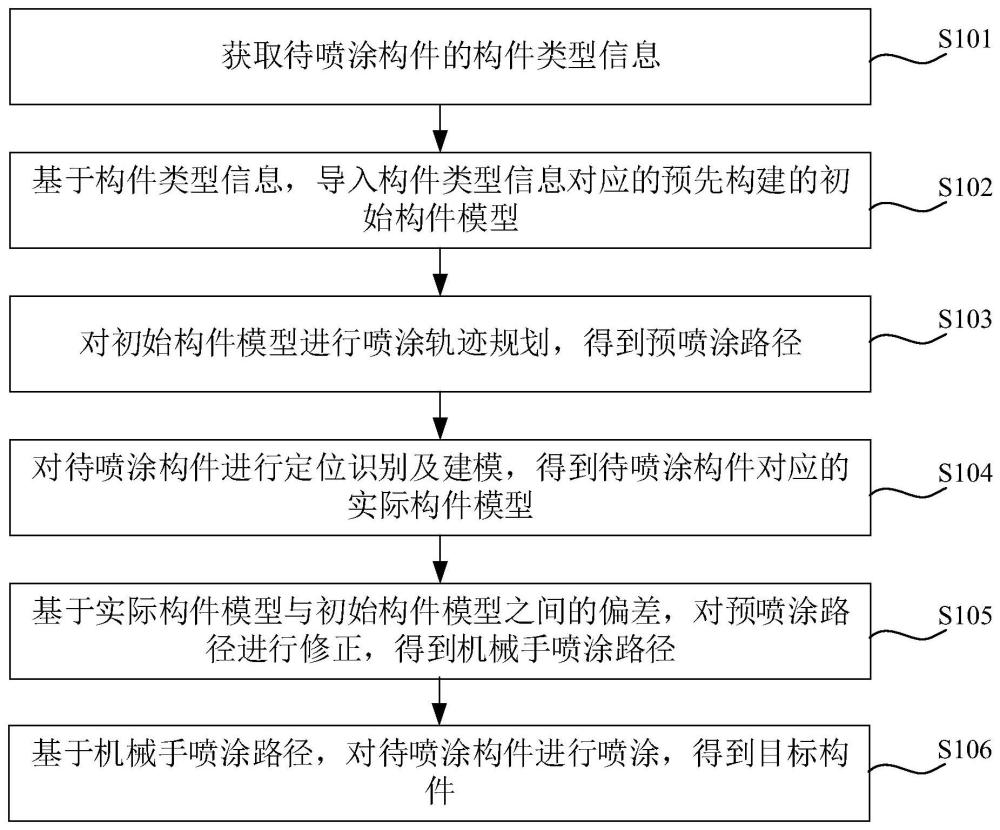
3、获取待喷涂构件的构件类型信息;
4、基于构件类型信息,导入构件类型信息对应的预先构建的初始构件模型;
5、对初始构件模型进行喷涂轨迹规划,得到预喷涂路径;
6、对待喷涂构件进行定位识别及建模,得到待喷涂构件对应的实际构件模型;
7、基于实际构件模型与初始构件模型之间的偏差,对预喷涂路径进行修正,得到机械手喷涂路径;
8、基于机械手喷涂路径,对待喷涂构件进行喷涂,得到目标构件。
9、在本发明中,通过导入构件对应的预先构建的构件模型进行喷涂规划,得到预喷涂路径,无需对每一构件进行建模及喷涂规划,大幅度节省了算力和时间;对构件进行实际定位识别,可以仅通过相机实现对构件进行拍照,利用相机与摆放构件的小车进行定位识别手眼标定,将流水节拍如:拍照,匹配规划与机械手喷涂作业优化为多工序并行处理,大大节省了单个构件的作业节拍时间;通过实际构件模型与预先构建的构件模型之间的偏差,对预喷涂路径进行修正,得到机械手喷涂路径,实现了自动喷涂,无需机械手规划机器人运动轨迹,极大程度上降低了对装置的通用性要求及喷涂轨迹规划算法模型的深度学习要求,进而大幅度降低了装置及算力成本。
10、在一种可选的实施方式中,对初始构件模型进行喷涂轨迹规划,得到预喷涂路径,包括:
11、将初始构件模型划分为工字主体点云集和附件点云集;
12、采用工字法,生成工字主体点云集对应的第一运动路径;
13、采用八叉法,生成附件点云集对应的第二运动路径;
14、将第一运动路径与第二运动路径合并,修正后得到预喷涂路径。
15、在该方式中,通过将构件模型分为主体结构及非联网附件部分,进一步简化了喷涂路径的生成,主体结构可以直接通过工字法生成主体结构对应的第一运动路径,附件部分采用八叉法生成对应的第二运动路径,将第一运动路径与第二运动路径合并修正,即可得到预喷涂路径,极大程度上降低了预喷涂路径规划的复杂度,进一步节省了喷涂路径规划所需的算力。
16、在一种可选的实施方式中,采用八叉法,生成附件点云集对应的第二运动路径,包括:
17、基于附件点云集,判断附件点云集对应的点云表面数据是否为凹面体构件;
18、在附件点云集对应的点云表面数据为凹面体构件时,采用包围盒法对凹面体构件进行上下拆分,得到若干包围盒;
19、利用包围盒,采用八叉法自动生成第二运动路径;
20、或者,在附件点云集对应的点云表面数据非凹面体构件时,采用八叉法自动生成第二运动路径。
21、在该方式中,通过确定附件部分是否为凹面体,在附件结构是凹面体时,拆分得到若干包围盒后进行八叉法生成运动路径,使得运动路径的计算更为简便,在附件结构非凹面体时,直接采用八叉法生成运动路径,可以更为便捷且快速实现预喷涂路径的生成。
22、在一种可选的实施方式中,对待喷涂构件进行定位识别及建模,得到待喷涂构件对应的实际构件模型,包括:
23、采用移动式相机对待喷涂构件进行拍照,得到若干待喷涂构件的局部图像;
24、利用局部图像,逆向建模生成待喷涂构件的实际点云数据模型;
25、采集支撑架的信息,构建支撑架点云数据模型,支撑架点云数据模型与得到实际点云数据模型共同构成实际构件模型,支撑架用于对待喷涂构件进行支撑。
26、在该方式中,通过利用移动式相机对构件进行拍照,无需采用更高配置的摄像设备,即可实现对构件的所有部位进行拍照,进而可以利用拍摄得到的局部图像构建得到构件的实际点云数据模型,由于放置构件需要设置对应的支撑架,因此,构建支撑架点云模型,结合实际点云数据模型,共同形成用于规划喷涂路径的实际构件模型,可以避免支撑架对构件的阻挡造成的阻挡,导致喷涂路径的不准确。
27、在一种可选的实施方式中,基于实际构件模型与初始构件模型之间的偏差,对预喷涂路径进行修正,得到机械手喷涂路径,包括:
28、将支撑架点云数据模型和实际点云数据模型,分别与预喷涂路径的点云数据进行比对,计算得到支撑架对预喷涂路径产生阻挡形成的阻挡区域;
29、基于阻挡区域,对预喷涂路径进行分割,将不受阻挡区域影响的路径划分为上半路径,将受阻挡区域影响的路径划分为下半路径;
30、根据就近点原则,对下半路径进行修正,得到修正后的下半路径;
31、将上半路径与修正后的下半路径合并,得到机械手喷涂路径。
32、在该方式中,通过计算得到支撑架产生的阻挡区域,确保喷涂路径的准确性;利用阻挡区域进行分割,将受阻挡区域影响的路径进行修正,维持不受阻挡区域影响的路径不变,减少了修正路径的算力消耗,进而可以更快实现对喷涂路径的规划。
33、在一种可选的实施方式中,根据就近点原则,对下半路径进行修正,得到修正后的下半路径,包括:
34、根据就近点原则,依次确定下半路径中每一行路径的起始点;
35、基于起始点的坐标数据,拼接下半路径中每一行路径,得到修正后的下半路径。
36、在该方式中,通过利用就近点原则对受阻挡区域影响的路径进行修正,减少了对喷涂路径的修正,确保修正后的喷涂路径的整体流动方向与空间布局的正确性,形成与起始点衔接自然、流向连贯的喷涂路径。
37、第二方面,本发明提供了一种钢构件表面喷涂装置,装置包括:
38、信息获取模块,用于获取待喷涂构件的构件类型信息;
39、构件模型构建模块,用于基于构件类型信息,导入构件类型信息对应的预先构建的初始构件模型;
40、第一喷涂规划模块,用于对初始构件模型进行喷涂轨迹规划,得到预喷涂路径;
41、模型定位识别模块,用于对待喷涂构件进行定位识别及建模,得到待喷涂构件对应的实际构件模型;
42、第二喷涂规划模块,用于基于实际构件模型与初始构件模型之间的偏差,对预喷涂路径进行修正,得到机械手喷涂路径;
43、构件喷涂模块,用于基于机械手喷涂路径,对待喷涂构件进行喷涂,得到目标构件。
44、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的钢构件表面喷涂方法。
45、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的钢构件表面喷涂方法。
46、第五方面,本发明提供了一种计算机程序产品,包括计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的钢构件表面喷涂方法。