基于轨迹预测的动态抓取机械臂
本发明涉及工业自动化装备,特别涉及一种基于轨迹预测的动态抓取机械臂。
背景技术:
1、在货物中转运输过程中,通常需要依靠工业机器人对物流货物进行分拣,在现有技术中,授权公告号为:cn219543173u的中国发明专利公开了一种物流分拣用机械手臂,包括支撑底座、移动调节机构、移动组件、手臂和抓手,所述移动调节机构设于支撑底座底壁上,所述移动组件设于支撑底座顶壁下,所述手臂安装在移动组件上,所述抓手设于手臂的一端上;所述移动调节机构包括嵌槽、双向丝杠、伺服电机、丝杠副一、丝杠副二、固定轴、支撑腿、连接杆、连接块和移动驱动组件,所述嵌槽设于支撑底座底壁上,所述伺服电机设于支撑底座外侧壁上,所述双向丝杠一端转动设于嵌槽内侧壁上。
2、对于上述物流分拣用机械手臂而言,在利用该机械手臂分拣货物的过程中,需要使用其真空吸盘吸持固定物流货物,以便实现对货物进行分拣搬运的目的;然而,在现实生活中,物流货物在运输过程中,一般包装在纸箱的内部,因此在使用该机械手臂悬空搬运物流货物的过程中,纸箱容易因无法承受物流货物的重力,而导致纸箱底部端口松动打开,物流货物掉落至纸箱外部的问题。
技术实现思路
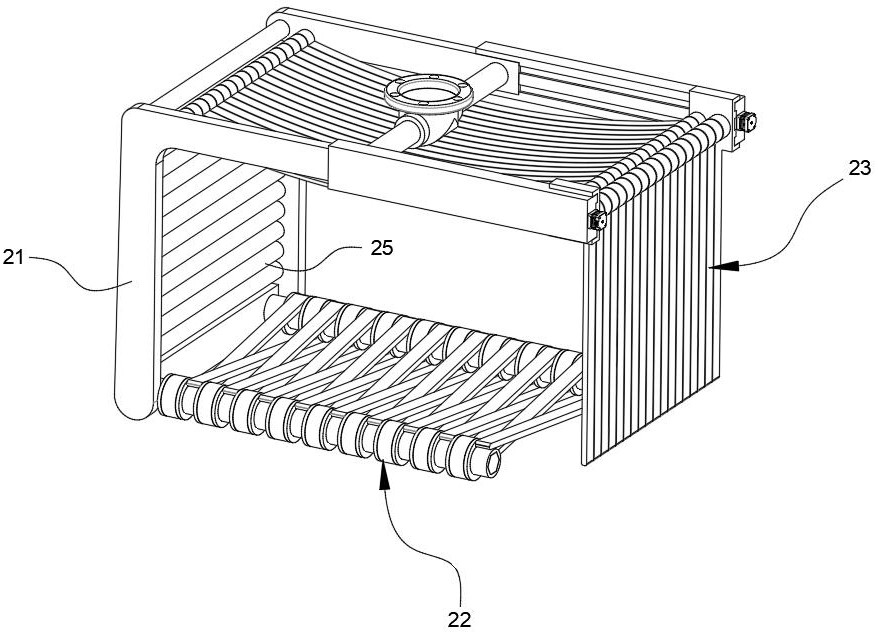
1、针对现有技术中存在的技术问题,本发明实施例提供了一种基于轨迹预测的动态抓取机械臂,包含:运载机械臂与拾取机械手,拾取机械手设置在运载机械臂的执行端,用于抓取货物,其特征在于,拾取机械手包含:承载框架、拾取模块与承托模块;
2、承载框架与运载机械臂的执行端固定连接;
3、承托模块设置在承载框架上,用于承载货物;
4、拾取模块设置在承载框架上,用于抓取货物。
5、进一步,承托模块包含:一对导向轴、一对第一轴套、一对复位弹簧、若干个第一承载组件与若干个第二承载组件;
6、一对导向轴设置在承载框架的内腔底部,任一个导向轴的尾端与承载框架的尾端固定连接,任一个导向轴沿承载框架的长度方向设置,导向轴为棱柱体;
7、一对第一轴套分别活动套设在一对导向轴上,第一轴套沿导向轴的轴向与导向轴滑动连接,第一轴套的内腔径向截面形状与导向轴的径向截面形状相匹配;
8、一对复位弹簧分别套设在一对导向轴上,复位弹簧的一端与导向轴相连,复位弹簧的另一端与第一轴套相连,用于驱动第一轴套进行复位;
9、若干个第一承载组件设置在其中一个第一轴套上,用于承载货物;
10、若干个第二承载组件设置在另一个第一轴套上,用于承载货物。
11、进一步,第一承载组件包含:若干个第一装配凸槽、若干个第一承载杆与若干个第一扭簧;
12、若干个第一装配凸槽固定设置在其中一个第一轴套的周向侧壁上,任一个第一装配凸槽与第一轴套的中心轴相同,若干个第一装配凸槽沿第一轴套的轴向依次排列;
13、若干个第一承载杆的尾端转动套设在其中一个第一轴套上,若干个第一承载杆的尾端分别与若干个第一装配凸槽的位置相匹配,任一个第一承载杆的头端活动搭接在另一个第一轴套上,第一承载杆的头端位于第一轴套与承载框架之间;
14、若干个第一扭簧套设在其中一个第一轴套上,若干个第一扭簧分别与若干个第一装配凸槽的位置相匹配,任一个第一扭簧的一端与对应的第一承载杆的尾端固定连接,任一个第一扭簧的另一端与对应的第一装配凸槽的内壁固定连接,用于驱动第一承载杆翻转复位。
15、进一步,第二承载组件包含:若干个第二装配凸槽、若干个第二承载杆与若干个第二扭簧;
16、若干个第二装配凸槽固定设置在其中一个第一轴套的周向侧壁上,任一个第二装配凸槽与第一轴套的中心轴相同,若干个第二装配凸槽沿第一轴套的轴向依次排列;
17、若干个第二承载杆的尾端转动套设在其中一个第一轴套上,若干个第二承载杆的尾端分别与若干个第二装配凸槽的位置相匹配,任一个第二承载杆的头端活动搭接在另一个第一轴套上,第二承载杆的头端位于第一轴套与承载框架之间;
18、若干个第二扭簧套设在其中一个第一轴套上,若干个第二扭簧分别与若干个第二装配凸槽的位置相匹配,任一个第二扭簧的一端与对应的第二承载杆的尾端固定连接,任一个第二扭簧的另一端与对应的第二装配凸槽的内壁固定连接,用于驱动第二承载杆翻转复位。
19、进一步,若干个第一承载组件的第一承载杆与若干个第二承载组件的第二承载杆相互交错设置,任一个第一承载杆位于其中一对相邻的第二承载杆之间。
20、进一步,任意相邻的第一承载杆与第二承载杆之间的其中一个夹角为承载夹角,承载夹角面向承载框架的内腔顶部,承载夹角的角度小于180°。
21、进一步,拾取模块包含:一对直线模组、一对滑块、第一承载轴、若干个挡杆与若干个第三扭簧;
22、一对直线模组固定设置在承载框架的顶部,任一个直线模组沿承载框架的长度方向设置,一对直线模组并行排列;
23、一对滑块分别固定设置在一对直线模组的执行端;
24、第一承载轴设置在一对滑块之间,第一承载轴的两端分别与一对滑块固定连接;
25、若干个挡杆的顶端与第一承载轴转动连接,若干个挡杆沿第一承载轴的轴向依次排列,任一个挡杆的底端垂向承载框架的底部;
26、若干个第三扭簧分别设置在若干个挡杆与第一承载轴之间的转动连接处,第三扭簧的一端与第一承载轴固定连接,第三扭簧的另一端与挡杆固定连接,用于驱动挡杆翻转复位。
27、进一步,拾取模块还包含:一对第二承载轴与若干个板弹簧;
28、其中一个第二承载轴设的两端分别与一对滑块固定连接,另一个第二承载轴设置在承载框架的内腔顶部,并且另一个第二承载轴的两端与承载框架固定连接,一对第二承载轴并行排列;
29、任一个板弹簧的两端分别与一对第二承载轴转动连接,若干个板弹簧并行排列。
30、进一步,拾取机械手还包含:装配窗口、若干个第三承载轴与若干个第二轴套;
31、装配窗口设置在承载框架的尾端,装配窗口与承载框架的内腔连通;
32、若干个第三承载轴设置在装配窗口中,任一个第三承载轴的两端均与承载框架固定连接,任一个第三承载轴沿承载框架的宽度方向设置,若干个第三承载轴沿承载框架的高度方向依次并行排列;
33、若干个第二轴套分别转动套设在若干个第三装配轴上。
34、进一步,承载框架上设有相机,用于采集货物的图像信息,运载机械臂上设有控制器,控制器与相机电性连接。
35、根据本发明实施例的基于轨迹预测的动态抓取机械臂,具备如下有益效果:
36、1、本装置通过在一对第一轴套上分别转动设置多个第一承载杆与多个第二承载杆,并限制第一承载杆与第二承载杆仅能朝向承载框体的内腔上侧翻转,可是目标货物能够顺利通过一对第一轴套之间的空隙由下至上进入至承载框体的内腔中,并且通过设置拾取模块,可利用直线模组驱动挡杆推动目标货物倾倒至第一承载杆与第二承载杆的上侧,在此过程中,被目标货物顶起的一部分第一承载杆与第二承载杆对目标货物起到限位作用,以增强本装置在拾取目标货物过程中的稳定性,其次,在本装置悬空搬运目标货物的过程中,第一承载杆与第二承载杆对目标货物起到承托作用,解决了现有技术中,因对目标货物采用吸持固定方案对货物进行悬空搬运,而存在的容易导致纸箱底部端口松动打开,货物掉落至纸箱外部的问题。
37、2、本装置通过在承托模块的上侧并行设置一对第二承载轴与若干个板弹簧,并使其中一个第二承载轴的两端分别与一对滑块项链,从而使一对直线模组驱动一对滑块朝向承载框架的尾端方向位移时,一对第二承载轴相向位移,若干个板弹簧的形变程度随之变大,与目标货物位置对应的部分板弹簧压紧目标货物,未与目标货物位置对应的其余板弹簧则对目标货物起到限位作用,增强了本装置在货物悬空搬运过程中的稳定性。
38、3、本装置通过将若干个第一承载杆与若干个第二承载杆交错设置,使任意相邻的第一承载杆或第二承载杆之间保留有足够的空隙,进而使本装置在搬运质地较软的目标货物时,具有更强的货物搬运稳定性。
39、要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并且意图在于提供要求保护的技术的进一步说明。
- 还没有人留言评论。精彩留言会获得点赞!