一种智能监控带破障隔离功能的森林消防机器人
1.本实用新型涉及消防机器人技术领域,具体涉及一种智能监控带破障隔离功能的森林消防机器人。
背景技术:
2.随着社会经济的迅猛发展,建筑和企业生产的特殊性,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高。一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等危害环境时,若没有相应的设备贸然冲进现场,不仅不能完成任务,还会徒增人员伤亡。因此发明了消防机器人来代替人们对不明情况进行探查和灭火处理,逐渐在灭火救灾领域得到广泛的应用。
3.尤其是在森林中,人员行走在其中是非常危险的,一旦发生意外救援也很难及时到达,这时就需要使用到机器人来代替人员进入森林探查情况,而现有的在森林中探查所使用的机器人通常为简单可移动式摄像机器人,可以对周围的环境进行传输,从而让外部指挥人员得知森林中的情况,以便于更好对该情况应对处理,但是在森林中不仅地形复杂多变,很多时候还会遇到高空坠物砸向机器人,现有的机器人不能很好的应对森林的地形环境,无法对障碍进行破除,并且对于高空坠物没有很好的防护措施,因此本实用新型提出一种智能监控带破障隔离功能的森林消防机器人。
技术实现要素:
4.本实用新型的目的在于:为解决现有的消防机器人不具备应对森林地形和破除障碍的功能,并且在高空坠物发生时很容易造成自身损坏的问题,本实用新型提供了一种智能监控带破障隔离功能的森林消防机器人。
5.本实用新型为了实现上述目的具体采用以下技术方案:
6.一种智能监控带破障隔离功能的森林消防机器人,包括履带式机器人,所述履带式机器人包括移动履带和驱动主体,所述驱动主体上端固定连接有保护壳,所述驱动主体上可拆卸连接有两个贯穿保护壳端部的压缩灭火罐,所述压缩灭火罐另一端固定连通有设置在驱动主体内部且贯穿保护壳顶部的可调节喷头,所述驱动主体上电路连通有竖直设置且贯穿保护壳的可伸缩摄像头,所述驱动主体一端固定安装有竖直向下设置的气缸推杆,所述气缸推杆输出端固定连接有支撑板,所述驱动主体另一端固定连接有安装板,所述安装板上通过驱动组件安装有两个可调节角度的切割盘。
7.进一步地,所述移动履带包括四个呈矩形分布且转动安装在驱动主体两侧的转动轮,位于同一侧的两个所述转动轮之间连接有支撑架,所述支撑架上转动安装有与同侧转动轮呈平行四边形设置的支撑轮,所述转动轮和支撑轮上转动套设有隔热履带。
8.进一步地,所述保护壳包括固定套设在驱动主体上端的矩形壳体,所述矩形壳体一端构造有两个与其内部相连通的螺纹管,所述驱动主体上端构造有两个与螺纹管相接设置的安装槽,两个所述压缩灭火罐分别滑动贯穿螺纹管且安装在两个安装槽内,所述螺纹
管位于矩形壳体外侧的一端螺纹连接有封盖。
9.进一步地,所述安装板的上表面两侧均构造有安装框,所述驱动组件包括转动安装在安装框内的转轴,所述转轴上固定套设有驱动齿轮和转动杆,所述安装框内转动安装有与驱动齿轮相啮合的传动齿轮,所述安装框上表面固定安装有输出轴转动贯穿安装框且与传动齿轮固定连接的驱动电机,所述切割盘固定连接在转动杆的另一端。
10.进一步地,所述切割盘包括固定连接在转动杆端部的安装盘,所述安装盘上端固定连接有输出轴竖直向下设置的高速电机,所述高速电机的输出轴贯穿安装盘且其端部固定连接有转动安装在安装盘底部的切割轮。
11.进一步地,所述切割轮的方位高度低于转动轮的方位高度。
12.本实用新型的有益效果如下:
13.1、本实用新型通过保护壳的设置可以对驱动主体上的零部件进行保护,如可以防止压缩灭火罐被外物撞击从而产生爆裂,可伸缩摄像头将收缩进保护壳内部,在不使用时不会被高空坠物所砸到,增加了装置的安全性。
14.2、本实用新型通过设置移动履带相较于车轮移动的方式可以适应一定程度的凹凸不平的路面,以便以更好的在森林中移动,而设置可伸缩摄像头可以将外界的环境路况实时传递给控制人员,以便于人员避开大型路障,设置驱动组件可以带动切割盘进行一定范围的角度调节,并通过切割盘可以将周围的小型路障进行一定的切割破碎,以便于装置能够继续前进,设置气缸推杆可以在装置陷入过深的凹坑中时,可以对装置本体进行支撑,使装置能够脱离凹坑,并且在装置整体侧翻时也能够将装置推动并恢复正常状态,增加了装置的灵活性,并且使装置可以适应更复杂多变的环境,增加了装置的探索性能。
附图说明
15.图1是本实用新型立体结构图;
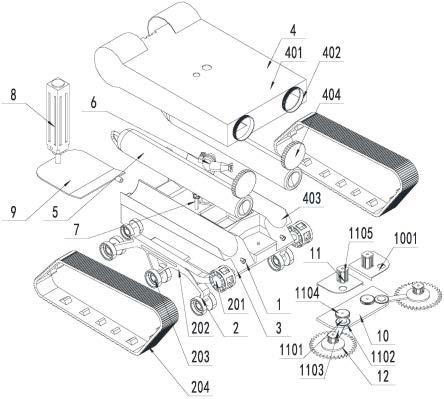
16.图2是本实用新型立体结构爆炸图;
17.图3是本实用新型平面俯视图;
18.图4是本实用新型图3中a-a方向的剖视图;
19.附图标记:1、履带式机器人;2、移动履带;201、转动轮;202、支撑架;203、支撑轮;204、隔热履带;3、驱动主体;4、保护壳;401、矩形壳体;402、螺纹管;403、安装槽;404、封盖;5、压缩灭火罐;6、调节喷头;7、可伸缩摄像头;8、气缸推杆;9、支撑板;10、安装板;1001、安装框;11、驱动组件;1101、转轴;1102、驱动齿轮;1103、转动杆;1104、传动齿轮;1105、驱动电机;12、切割盘;1201、安装盘;1202、高速电机;1203、切割轮。
具体实施方式
20.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
21.如图1-4所示,本实用新型一个实施例提出的一种智能监控带破障隔离功能的森林消防机器人,包括履带式机器人1,履带式机器人1包括移动履带2和驱动主体3,驱动主体3上端固定连接有保护壳4,驱动主体3上可拆卸连接有两个贯穿保护壳4端部的压缩灭火罐5,压缩灭火罐5另一端固定连通有设置在驱动主体3内部且贯穿保护壳4顶部的可调节喷头
6,驱动主体3上电路连通有竖直设置且贯穿保护壳4的可伸缩摄像头7,驱动主体3一端固定安装有竖直向下设置的气缸推杆8,气缸推杆8输出端固定连接有支撑板9,驱动主体3另一端固定连接有安装板10,安装板10上通过驱动组件11安装有两个可调节角度的切割盘12,在装置运作时,通过移动履带2可以带动装置整体在地面进行移动,履带的移动方式不仅可以产生一定的缓冲能力,并且相较于轮胎的移动方式可以更好的适应凹凸不平的地面,增加了装置的移动性能,驱动主体3内设置有用于驱动移动履带2运作的驱动元件如电机等辅助元件,并且在驱动主体3上可拆卸安装压缩灭火罐5,可以使用可调节喷头6对周围发生的小规模火灾进行扑灭,使装置能够顺利经过以便于继续进行探索收集信息,压缩灭火罐5是一种内部存有高压灭火剂的罐体,当打开罐体开口时灭火剂会自动从罐体内喷出,驱动主体3内部安装有连接在压缩灭火罐5与可调节喷头6之间的电磁控制阀,用于控制灭火剂的喷洒与关闭,设置可伸缩摄像头7可以对周围环境进行实时的传输,以便于控制人员更好的控制装置避开大型路障,并且可以收集周围环境信息,因为可伸缩摄像头7为易损的精密设备,在进入到火灾范围中时可以随时将可伸缩摄像头7收入到保护壳4内部,以防止高空坠物对其造成损害,而设置保护壳4还可以防止高空坠物对压缩灭火罐5进行撞击,防止其发生爆裂从而造成整体装置的损坏,增加了装置的安全性,设置驱动组件11可以带动切割盘12进行一定范围的角度调节,以便于更好的对周围的小型路障进如树枝等小型物品行切割清理,使装置能够顺利通行,在装置进入到较深的凹坑中时,在驱动主体3一端设置的气缸推杆8和支撑板9可以对装置的整体进行支撑,使装置能够脱离凹坑,并且在装置整体侧翻时也能够配合移动履带2将装置推移并恢复正常状态,增加了装置的灵活性,并且使装置可以适应更复杂多变的环境,增加了装置的探索性能。
22.如图2所示,在一些实施例中,移动履带2包括四个呈矩形分布且转动安装在驱动主体3两侧的转动轮201,位于同一侧的两个转动轮201之间连接有支撑架202,支撑架202上转动安装有与同侧转动轮201呈平行四边形设置的支撑轮203,转动轮201和支撑轮203上转动套设有隔热履带204,设置隔热履带204可以使装置能够在火灾环境中进行移动,防止履带融化,通过转动轮201和支撑轮203的支撑使隔热履带204形成一个平行四边形的形状,通过平行四边形前端的悬空设置,可以使装置更好的进行爬坡和越过小型路障与地面凸起,增加了装置的适应能力,方便后续的信息收集。
23.如图2所示,在一些实施例中,保护壳4包括固定套设在驱动主体3上端的矩形壳体401,矩形壳体401一端构造有两个与其内部相连通的螺纹管402,驱动主体3上端构造有两个与螺纹管402相接设置的安装槽403,两个压缩灭火罐5分别滑动贯穿螺纹管402且安装在两个安装槽403内,螺纹管402位于矩形壳体401外侧的一端螺纹连接有封盖404,通过设置螺纹管402和封盖404的螺纹配合,不仅方便对压缩灭火罐5进行安装和拆卸,而且通过封盖404还能够将其完全包裹在保护壳4内,防止受到外部撞击而爆裂,增加了装置的安全性。
24.如图2所示,在一些实施例中,安装板10的上表面两侧均构造有安装框1001,驱动组件11包括转动安装在安装框1001内的转轴1101,转轴1101上固定套设有驱动齿轮1102和转动杆1103,安装框1001内转动安装有与驱动齿轮1102相啮合的传动齿轮1104,安装框1001上表面固定安装有输出轴转动贯穿安装框1001且与传动齿轮1104固定连接的驱动电机1105,切割盘12固定连接在转动杆1103的另一端,通过驱动电机1105可以带动传动齿轮1104和驱动齿轮1102进行啮合转动,从而带动与驱动齿轮1102一侧相连接的转动杆1103进
行角度调节,无需调整整体装置的移动方向即可增大切割盘12的切割范围,更方便切割盘12清除小型路障。
25.如图1所示,在一些实施例中,切割盘12包括固定连接在转动杆1103端部的安装盘1201,安装盘1201上端固定连接有输出轴竖直向下设置的高速电机1202,高速电机1202的输出轴贯穿安装盘1201且其端部固定连接有转动安装在安装盘1201底部的切割轮1203,通过设置高速电机1202可以带动切割轮1203进行高速转动,使切割轮1203可以对周围的木质杂物进行一定的切割,使其不会妨碍装置的移动,方便装置进行行进收集信息。
26.如图4所示,在一些实施例中,切割轮1203的方位高度低于转动轮201的方位高度,用于使切割后的路障高度能够被平行四边形的履带越过,以便于装置的行进。
27.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1