一种消防喷淋追位自动下量机器人的制作方法
1.本实用新型涉及消防喷淋施工技术领域,特别涉及一种消防喷淋追位自动下量机器人。
背景技术:
2.在施工现场消防喷淋末端支管追位过程中,目前是采用人工尺量定尺下料,人工测量费时费力,测量尺寸准确性与工人水平存在一定关联,例如一名水平较高的技术工人,在使用吊锤测量方法需要反复测量、下料、安装2-3次才可以安装成功。与此同时,支管安装完成后,因人工测量方法粗略引起测量数据不准确,导致消防喷淋头在精装修阶段对喷淋头点位位置精度要求较高的天花板上极易出现点位位置偏移、喷淋头凹陷或者凸出现象,观感效果较差,并且无法保证质量一次成优,后期拆卸维修工作量大;人工成本较高,造成许多的人工成本浪费。
3.如何解决上述技术问题为本实用新型面临的课题。
技术实现要素:
4.为了能够解决上述现有技术中的问题,本实用新型提供了一种批量快速下量、结构简单、下量精度高、方便转移携带、操作方便的消防喷淋追位自动下量机器人。
5.为了实现上述实用新型目的,本实用新型提供了一种消防喷淋追位自动下量机器人,其中,包括三维扫描仪和人机交互模块;
6.所述三维扫描仪用于扫描若干个喷淋支管接头点、获取并向所述人机交互模块传送若干个所述喷淋支管接头点的三维坐标值a*;
7.所述人机交互模块用于建立若干个喷淋头安装点的三维模型、并分别输出若干个所述喷淋头安装点的三维坐标值b*,接收若干个所述喷淋支管接头点的三维坐标值a*,根据所述三维坐标值b*及所述三维坐标值a*计算并显示各喷淋下量支管的追位下量值,若干个所述喷淋头安装点与若干个所述喷淋支管接头点一一对应。
8.使用时,首先在所述人机交互模块上建立若干个所述喷淋头安装点的三维模型、并分别输出若干个所述喷淋头安装点的三维坐标值b*,其次在与若干个所述喷淋头安装点一一对应的若干个所述喷淋支管接头点安装标靶反光片;然后将所述消防喷淋追位自动下量机器人置于地面上,并移动至所述三维扫描仪对若干个所述喷淋支管接头点均可扫描处,控制所述三维扫描仪对若干个所述喷淋支管接头点进行扫描、并将若干个所述喷淋支管接头点的三维坐标值a*分别传送至所述人机交互模块,由所述人机交互模块根据所述三维坐标值b*及所述三维坐标值a*、计算并显示各喷淋下量支管的追位下量值,可以实现同一扫描空间内喷淋下量支管的批量下量,作业效率高,且无人工测量误差,下量精度高。
9.本实用新型的具体特点还有,所述消防喷淋追位自动下量机器人还包括底座,设置在所述底座底部的若干个底轮,方便转移,且可实现自动行走,以及设置在所述底座上、用于安装所述三维扫描仪的自动水平平台,可以适应不同地面环境的使用要求,自动水平
平台可通过云台增加水平传感器来实现,此为现有技术,在此不再赘述,使得装置高度集成化,便于转移及使用。
10.本实用新型的具体特点还有,所述人机交互模块设置为平板电脑,方便操作及携带。
11.本实用新型的具体特点还有,所述消防喷淋追位自动下量机器人还包括设置在所述底座上、与所述人机交互模块信号连接的信号收发器,优选的,底座上设置无线路由器,人机交互模块连接到该无线路由器,即底座上搭载的部件与人机交互模块在同一个无线局域网内,实现协作操作,提高作业效率。
12.本实用新型的具体特点还有,所述消防喷淋追位自动下量机器人还包括设置在所述底座上的摄像头,作业人员可通过摄像头的成像对消防喷淋追位自动下量机器人底座所搭载部件的行走进行判断及操控,其全自动化行走。
13.本实用新型的具体特点还有,所述消防喷淋追位自动下量机器人还包括设置在所述底座上的标签打印机,用于打印各所述喷淋下量支管的追位下量值,即打印包括各段喷淋下量支管下料长度数据的信息,如二维码标签。
14.利用所述消防喷淋追位自动下量机器人进行的下量方法,包括以下步骤:
15.步骤s1:在所述人机交互模块上建立若干个所述喷淋头安装点的三维模型、并分别输出若干个所述喷淋头安装点的三维坐标值b*(xb,yb,zb);
16.步骤s2:在与若干个所述喷淋头安装点一一对应的若干个所述喷淋支管接头点安装标靶反光片;
17.步骤s3:将所述消防喷淋追位自动下量机器人置于地面上,并移动至所述三维扫描仪对若干个所述喷淋支管接头点均可扫描处;
18.步骤s4:控制所述三维扫描仪对若干个所述喷淋支管接头点进行扫描、并将若干个所述喷淋支管接头点的三维坐标值a*(xa,ya,za)分别传送至所述人机交互模块;
19.步骤s5:由所述人机交互模块根据所述三维坐标值b*(xb,yb,zb)及所述三维坐标值a*(xa,ya,za)、计算并显示各喷淋下量支管的追位下量值。
20.本实用新型的具体特点还有,所述下量方法还包括:
21.步骤s6:根据需要重复步骤s3至步骤s5若干次;
22.步骤s7:将各所述追位下量值取平均值。
23.本实用新型的具体特点还有,所述步骤s1包括以下步骤:
24.步骤s101:以房间为单位,利用bim软件建立房间三维模型,确定天花板层及所述地面,其中将喷淋支管接头点所在层假设为喷淋支管层;
25.优选的,在建立房间三维模型时,同时确定喷淋支管层,并在喷淋支管层假定各喷淋支管接头点,其初始值均空置;
26.步骤s102:在所述天花板层上对若干个所述喷淋头安装点进行排布;
27.步骤s102:以所述房间地面的任一角为坐标原点,分别输出若干个所述喷淋头安装点的三维坐标值b*(xb,yb,zb),通常,选房间西南角作为坐标原点。
28.本实用新型的具体特点还有,在所述步骤s5中,以所述步骤s102中的所述坐标原点为参考,所述人机交互模块分别对若干个所述喷淋支管接头点的三维坐标值a*进行修正、并分别输出若干个所述喷淋支管接头点的三维坐标修正值a*’(x
a’,y
a’,z
a’),简化计算
步骤,提高下量效率,优选的,用该三维坐标修正值a*’(x
a’,y
a’,z
a’)填充步骤s101中各喷淋支管接头点空置的初始值。
29.参见附图3,每相应的喷淋支管接头点与喷淋头安装点之间,需要进行追位下量的喷淋下量支管有三段,长度分别为a、b、c,其中:
30.b值为常量,根据消防喷淋头的安装高度标准进行提前预设;
31.a值为喷淋支管接头点、喷淋头安装点之间的高度差再减去b值,即:
32.a=za’-z
b-b;
33.c值为喷淋支管接头点在天花板层的正投影点与喷淋头安装点之间的直线距离,通过喷淋支管接头点与喷淋头安装点在x方向上的差值、以及喷淋支管接头点与喷淋头安装点在y方向上的差值,即可通过勾股定理计算出c值,即:
34.c2=(xa’-xb)2+(ya’-yb)235.本实用新型的有益效果是:本实用新型提供的消防喷淋追位自动下量机器人可以实现同一扫描空间内喷淋下量支管的批量下量,作业效率高,且无人工测量误差,下量精度高;本实用新型结构简单,操作方便,可实现自动化行走,集成度高且方便转移携带,适于广泛推广应用。
附图说明
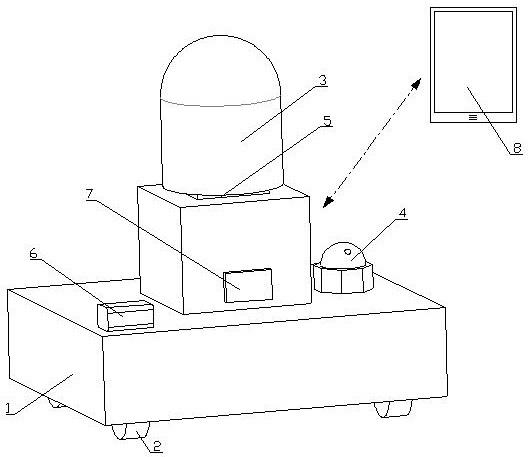
36.图1为本实用新型中消防喷淋追位自动下量机器人的结构示意图;
37.图2为本实用新型中喷淋支管接头点、喷淋头安装点的位置关系示意图;
38.图3为本实用新型中追位下量尺寸示意图。
39.其中,附图标记为:1、底座;2、底轮;3、三维扫描仪;4、摄像头;5、自动水平平台;6、标签打印机;7、信号收发器;8、人机交互模块;a、喷淋支管接头点;b、喷淋头安装点;ⅰ、喷淋支管层;ⅱ、天花板层;ⅲ、地面。
具体实施方式
40.为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
41.参见图1,本实用新型实施例提供了一种消防喷淋追位自动下量机器人,其中,包括三维扫描仪3和人机交互模块8,其中三维扫描仪3设置为三维激光扫描仪,其测量距离范围为 0 米-10米,测量结果偏差不超过
±
1厘米,水平面误差不超过
±5°
;
42.三维扫描仪3用于扫描若干个喷淋支管接头点a、获取并向人机交互模块传送若干个喷淋支管接头点a的三维坐标值a*;
43.人机交互模块8用于建立若干个喷淋头安装点b的三维模型、并分别输出若干个喷淋头安装点b的三维坐标值b*,接收若干个喷淋支管接头点a的三维坐标值a*,根据三维坐标值b*及三维坐标值a*计算并显示各喷淋下量支管的追位下量值,若干个喷淋头安装点b与若干个喷淋支管接头点a一一对应。
44.使用时,首先在人机交互模块8上建立若干个喷淋头安装点b的三维模型、并分别输出若干个喷淋头安装点b的三维坐标值b*,其次在与若干个喷淋头安装点b一一对应的若干个喷淋支管接头点a安装标靶反光片;然后将消防喷淋追位自动下量机器人置于地面ⅲ上,并移动至三维扫描仪3对若干个喷淋支管接头点a均可扫描处,控制三维扫描仪3对若干
个喷淋支管接头点a进行扫描、并将若干个喷淋支管接头点a的三维坐标值a*分别传送至人机交互模块8,由人机交互模块8根据三维坐标值b*及三维坐标值a*、计算并显示各喷淋下量支管的追位下量值,可以实现同一扫描空间内喷淋下量支管的批量下量,作业效率高,且无人工测量误差,下量精度高。
45.本实用新型的具体特点还有,消防喷淋追位自动下量机器人还包括底座1,设置在底座1底部的若干个底轮2,方便转移,且可实现自动行走,以及设置在底座1上、用于安装三维扫描仪3的自动水平平台5,可以适应不同地面环境的使用要求,自动水平平台5可通过云台增加水平传感器来实现,此为现有技术,在此不再赘述。
46.本实用新型的具体特点还有,人机交互模块8设置为平板电脑,方便操作及携带。
47.本实用新型的具体特点还有,消防喷淋追位自动下量机器人还包括设置在底座1上、与人机交互模块8信号连接的信号收发器7,优选的,底座1上设置无线路由器,人机交互模块8连接到该无线路由器,即底座1上搭载的部件与人机交互模块8在同一个无线局域网内,实现协作操作,提高作业效率。
48.本实用新型的具体特点还有,消防喷淋追位自动下量机器人还包括设置在底座1上的摄像头4,作业人员可通过摄像头4的成像对消防喷淋追位自动下量机器人底座1所搭载部件的行走进行判断及操控,其全自动化行走。
49.本实用新型的具体特点还有,消防喷淋追位自动下量机器人还包括设置在底座1上的标签打印机6,用于打印各喷淋下量支管的追位下量值,即打印包括各段喷淋下量支管下料长度数据的信息,如二维码标签。
50.利用消防喷淋追位自动下量机器人进行的下量方法,包括以下步骤:
51.步骤s1:在人机交互模块8上建立若干个喷淋头安装点b的三维模型、并分别输出若干个喷淋头安装点b的三维坐标值b*(xb,yb,zb);
52.步骤s2:在与若干个喷淋头安装点b一一对应的若干个喷淋支管接头点a安装标靶反光片;
53.步骤s3:将消防喷淋追位自动下量机器人置于地面ⅲ上,并移动至三维扫描仪3对若干个喷淋支管接头点a均可扫描处;
54.步骤s4:控制三维扫描仪3对若干个喷淋支管接头点a进行扫描、并将若干个喷淋支管接头点a的三维坐标值a*(xa,ya,za)分别传送至人机交互模块8;
55.步骤s5:由人机交互模块8根据三维坐标值b*(xb,yb,zb)及三维坐标值a*(xa,ya,za)、计算并显示各喷淋下量支管的追位下量值。
56.进一步地,下量方法还包括:
57.步骤s6:根据需要重复步骤s3至步骤s5若干次;
58.步骤s7:将各追位下量值取平均值。
59.本实用新型的具体特点还有,步骤s1包括以下步骤:
60.步骤s101:参见附图2,以房间为单位,利用bim软件建立房间三维模型,确定喷淋支管层ⅰ、天花板层ⅱ及地面ⅲ;
61.步骤s102:在天花板层ⅱ上对若干个喷淋头安装点b进行排布;
62.步骤s102:以房间地面ⅲ的任一角为坐标原点,分别输出若干个喷淋头安装点b的三维坐标值b*(xb,yb,zb),通常,选房间西南角作为坐标原点。
63.本实用新型的具体特点还有,在步骤s5中,以步骤s102中的坐标原点为参考,人机交互模块8分别对若干个喷淋支管接头点a的三维坐标值a*进行修正、并分别输出若干个喷淋支管接头点a的三维坐标修正值a*’(x
a’,y
a’,z
a’)。
64.参见附图3,每相应的喷淋支管接头点a与喷淋头安装点b之间,需要进行追位下量的喷淋下量支管有三段,长度分别为a、b、c,其中:
65.b值为常量,根据消防喷淋头的安装高度标准进行提前预设;
66.a值为喷淋支管接头点a、喷淋头安装点b之间的高度差再减去b值,即:
67.a=za’-z
b-b;
68.c值为喷淋支管接头点a在天花板层的正投影点与喷淋头安装点b之间的直线距离,通过喷淋支管接头点a与喷淋头安装点b在x方向上的差值、以及喷淋支管接头点a与喷淋头安装点b在y方向上的差值,即可通过勾股定理计算得出c值,即:
69.c2=(xa’-xb)2+(ya’-yb)270.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1