仿生口腔咀嚼装置及包括该装置的仿生口腔食物加工系统的制作方法
1.本实用新型属于仿生模拟消化领域,特别涉及一种仿生口腔咀嚼装置及包括该装置的仿生口腔食物加工系统。
背景技术:
2.口腔是消化管的起始结构,由上、下壁和侧壁组成一个腔系,口腔内含有舌和牙等器官,是食物研磨和搅拌的主要器官。食物的口腔破碎过程对于食物的粒径大小和消化结局至关重要。脸颊作为两侧壁参与围成口腔。以往关于口腔模拟消化的设备中,较少关注以下两点:
3.(1)模拟不同牙齿模式的咀嚼系统。健康成年人牙齿为28~32颗,牙齿缺失会使咀嚼功能会降低,然而以往的技术并无法重现这一过程,而实际研究过程一些特殊人群,如约有48.9%的老年人出现因机械摩擦作用而引起的牙体硬组织丧失;儿童生长发育阶段会有不断的牙齿更替过程,如何模拟这些缺齿状态下的口腔咀嚼,目前并没有相对应的口腔咀嚼系统;
4.(2)没有模拟脸颊,导致口腔加工的食团水分、湿度和真人的咀嚼相差比较大。而且没有脸颊,也会导致模拟食物在口腔加工的过程中,食糜会出现从牙齿上漏掉下来的情况。
技术实现要素:
5.为了解决上述问题,本实用新型提供一种仿生口腔咀嚼装置及包括该装置的仿生口腔食物加工系统,该仿生口腔咀嚼装置能够模不同牙齿模式和脸颊的口腔咀嚼,以更接近真人的口腔咀嚼状态。
6.为了实现上述目的,提供一种仿生口腔咀嚼装置,所述仿生口腔咀嚼装置包括:支架;设置在所述支架上的仿真人体上颚和仿真人体下颚;包围所述仿真人体上颚和所述仿真人体下颚以形成仿真口腔的仿真脸颊;安装在所述仿真口腔中的仿真牙齿,每颗所述仿真牙齿均可拆卸地安装在所述仿真口腔中;用于驱动所述仿真人体上颚做往复研磨运动的线性驱动器;以及用于驱动所述仿真人体下颚做往复旋转挤压运动的旋转驱动器。
7.进一步地,所述仿真脸颊通过塑胶形成。
8.进一步地,所述仿真牙齿包括可拆卸地安装在所述仿真人体上颚和所述仿真人体下颚的成人牙齿模型和幼儿牙齿模型。
9.进一步地,所述成人牙齿模型上设置有多个第一凹槽和多颗不同的成人仿真牙齿,并且所述成人仿真牙齿能够拆卸地安装在所述第一凹槽中。
10.进一步地,所述幼儿牙齿模型上设置有多个第二凹槽和多颗不同的幼儿仿真牙齿,并且所述幼儿仿真牙齿能够拆卸地安装在所述第二凹槽中。
11.进一步地,所述线性驱动器包括设置在所述支架上且与所述仿真人体上颚固定连接的线性滑台和用于与所述线性滑台连接的驱动马达。
12.进一步地,所述旋转驱动器包括旋转步进电机,所述旋转步进电机的输出轴与所述仿真人体下颚连接。
13.根据本技术的另一方面,提供一种仿生口腔食物加工系统,该系统包括上述的仿生口腔咀嚼装置。
14.进一步地,所述仿生口腔食物加工系统还包括:与所述仿生口腔咀嚼装置连接的控制器,用于控制所述仿生口腔咀嚼装置的咀嚼过程;以及与所述控制器电连接的唾液流加装置,所述控制器控制所述唾液流加装置向所述仿生口腔咀嚼装置注入唾液。
15.进一步地,所述仿生口腔食物加工系统还包括温控设备,所述仿生口腔咀嚼装置设置在所述温控设备中用以控制所述仿真口腔的温度。
16.根据本技术,实现了对人体咀嚼过程中挤压和研磨动作的准确模拟,更加真实的模拟了人体咀嚼过程中这两个过程的同时性,可动态模拟人体咀嚼过程中不同阶段的食糜形成过程,为研究食物向食糜的转化过程提供可能。
17.并且,本技术能够模拟不同牙齿模式和脸颊的口腔咀嚼,从而能够模拟更接近真人的口腔咀嚼状态。
附图说明
18.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
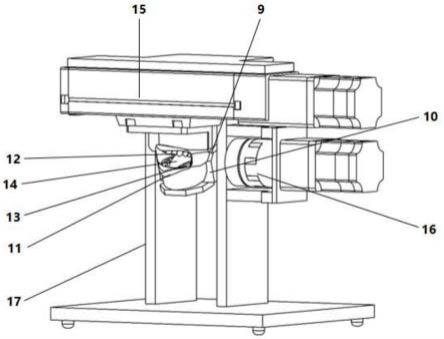
19.图1示出了根据本技术一实施例的仿真口腔咀嚼装置的立体图;
20.图2示出了图1所示的仿真空腔咀嚼装置的主视图;
21.图3示出了图1所示的仿真口腔咀嚼装置的左视图;
22.图4示出了图1所示的仿真口腔咀嚼装置的俯视图;
23.图5示出了设置有图1所示的仿真口腔咀嚼装置的仿真口腔食物加工系统;
24.图6示出了真人咀嚼、通过图5所示的仿真口腔食物加工系统咀嚼以及不具有仿真脸颊的对照设备咀嚼后的食糜水分含量对比图;
25.图7示出了张开设定角度时的示意图;
26.图8示出了模拟不同状态下的成人牙齿模型,其中左侧为模拟成人完整的牙齿模型,右侧为模拟缺失状态下的牙齿模型;
27.图9示出了模拟不同时期的幼儿牙齿模型,从左到右分别为:模拟6个月左右萌出2颗乳牙的牙齿模型;模拟18个月左右萌出12颗牙齿的模型;模拟2岁半时20颗牙齿的模型。
具体实施方式
28.为了使本技术的目的、技术方案及优点更加清晰/明晰,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
29.如图1至图4所示,其示意示出了根据本技术一实施例的仿生口腔咀嚼装置。
30.如图所示,该仿真口腔咀嚼装置包括支架17、仿真人体上颚、仿真人体下颚、仿真牙齿12、13、仿真脸颊11以及线性驱动器15和旋转驱动器16等。
31.仿真人体上颚通过上颚固定器9固定在线性驱动器15上。线性驱动器15驱动仿真人体上颚做往复研磨运动。
32.根据本技术的一实施例,线性驱动器15包括线性滑台和驱动马达,线性滑台设置于支架17上,且与仿真人体上颚形成固定连接,驱动马达与线性滑台连接,用于驱动仿真人体上颚做直线往复运动。
33.仿真人体下颚通过下颚固定器10结合在上颚固定器9上,并且下颚固定器10与旋转驱动器16连接。旋转驱动器16驱动仿真人体下颚做往复旋转挤压运动。
34.根据本技术的一实施例,旋转驱动器16设置为旋转步进电机,其输出轴与仿真人体下颚连接,用于驱动仿真人体下颚做旋转往复运动。
35.根据本技术的一优选实施例,线性驱动器15控制仿真人体上颚的研磨区间为0~10mm,其研磨速度为0~10mm/s;旋转驱动器16控制仿真人体下颚的旋转开合角度为0~10
°
,其旋转开合角速度为0~10
°
/s。
36.如图所示,仿真牙齿设置有仿真上口腔牙齿12和仿真下口腔牙齿13,在仿真上口腔牙齿12和仿真下口腔牙齿13之间还设置有模拟舌头14。
37.根据本技术的一实施例,安装在仿真口腔中的仿真牙齿均可拆卸地安装在仿真口腔中,例如,仿真牙齿可以通过螺丝等固定在牙床上。因此,根据需要,可以任意替换仿真牙齿中的任何一颗牙齿。
38.并且,根据本技术的一优选实施例,可以将仿真牙齿设计成可拆卸地安装在仿真人体上颚或仿真人体下颚的成人牙齿模型(如下面图8中所示)和幼儿牙齿模型(如下面图9中所示),从而,根据本技术的仿真口腔咀嚼装置可以模拟不同牙齿模式的口腔咀嚼。
39.根据本技术的又一优选实施例,成人牙齿模型上可以设置有多个第一凹槽和多颗不同的成人仿真牙齿,并且成人仿真牙齿能够拆卸地安装在第一凹槽中。
40.图8示出模拟不同状态下的成人牙齿模型,其中左侧为模拟成人28颗(不考虑长出第三磨牙的情况,即32颗牙)完整的牙齿模型,右侧模拟缺失状态下的牙齿模型;其中,1~7分别表示为:1.中切牙;2.侧切牙;3.尖牙;4.第一前磨牙;5.第二前磨牙;6.第一磨牙;7.第二磨牙。
41.同样,幼儿牙齿模型上设置有多个第二凹槽和多颗不同的幼儿仿真牙齿,并且幼儿仿真牙齿能够可拆卸地安装在第二凹槽中。
42.图9示出了儿童不同时期的仿真牙齿模型,出了模拟不同时期的幼儿牙齿模型,从左到右分别为:模拟6个月左右萌出2颗乳牙的牙齿模型;模拟18个月左右萌出12颗牙齿的模型;模拟2岁半时20颗牙齿的模型。
43.在仿真人体上颚和仿真人体下颚外部还设置有仿真脸颊11,仿真脸颊11包围仿真人体上颚和仿真人体下颚以形成容纳仿真牙齿和模拟舌头14的仿真口腔,并且仿真脸颊11上还包括有唇部。根据本技术的一实施例,仿真脸颊11可以通过塑胶形成,从而帮助口腔维持其内相对恒定的温度,并且可以阻挡食物掉落。
44.根据本技术的一实施例,仿生口腔咀嚼装置还包括设置在仿真人体上颚和仿真人体下颚之间的用于固定食物的食团挡板。
45.图5示出了设置有图1所示的仿真口腔咀嚼装置的仿真口腔食物加工系统。
46.如图所示,该仿真口腔食物加工系统包括四大部分:控制器、程序指令收发装置、
仿真口腔咀嚼设备以及唾液流加装置。控制器例如为电脑(含控制软件),用于设定模拟口腔的水平运动参数和旋转运动参数。控制器分别与仿真口腔咀嚼设备以及唾液流加装置连接,其通过程序收发装置向仿真口腔咀嚼设备以及唾液流加装置发送指令来控制仿真口腔咀嚼设备的咀嚼运动以及唾液流加装置的唾液流施加动作。具体地,控制器1将程序指令发送给牙床水平运动程序指令导出线2和牙床垂直运动程序指令导出线3来分别接收模拟牙床的水平运动和垂直运动指令后,水平运动指令线路5和垂直运动指令线路6接收指令并准备执行,此时,温控设备已经将口腔模拟的环境加热到37℃;并安装完口腔模型。
47.下面将更详细地描述仿真口腔食物加工系统的结构。
48.控制器1里面安装有控制咀嚼程序的软件,可以通过更改线性驱动器15的驱动马达的驱动参数(以下称为s参数)和旋转驱动器16的旋转步进电机的参数(以下称为r参数)以及时间来达到模拟不同咀嚼模式的目的。
49.s参数例如可以包括操作类型(operation type)、位置(position)、移动速度(speed)、移动加速度(acceleration)、停止减速(stopping deceleration)、操作电流(operating current)、下一个动作和上一个动作间的时间延迟(drive-complete delay time)等。当然,s参数可以根据需要进行设置,并不限于于此。
50.r参数例如可以包括操作类型(operation type)、位置(position)、移动/旋转速度(speed)、移动加速度(acceleration)、停止减速(stopping deceleration)、操作电流(operating current)、下一个动作和上一个动作间的时间延迟(drive-complete delay time)等。当然,r参数可以根据需要进行设置,并不限于于此。
51.如图5所示,程序指令收发装置4包括接送和控制水平运动的程序指令模块4.1和接送和控制垂直运动的程序指令模块4.2。
52.并且,仿真口腔食物加工系统还包括牙床水平运动程序指令导出线2、牙床垂直运动程序指令导出线3、水平运动指令线路5和垂直运动指令线路6。
53.控制器1通过牙床水平运动程序指令导出线2与接送和控制水平运动的程序指令模块4.1连接,接送和控制水平运动的程序指令模块4.1通过水平运动指令线路5与仿真口腔咀嚼装置相连。
54.从而,程序指令收发装置4接收到来自控制器1的使牙床水平运动的指令后,通过水平运动指令线路5将该指令传送给仿真口腔咀嚼装置,从而控制仿真口腔咀嚼装置的咀嚼动作。
55.控制器1通过牙床垂直运动程序指令导出线3与接送和控制垂直运动的程序指令模块4.2连接,接送和控制垂直运动的程序指令模块4.2通过垂直运动指令线路6与仿真口腔咀嚼装置相连。从而,程序指令收发装置4接收到来自控制器1的使牙床垂直运动的指令后,通过垂直运动指令线路6将该指令传送给仿真口腔咀嚼装置,从而控制仿真口腔咀嚼装置的咀嚼动作。
56.仿真口腔食物加工系统还包括温控设备7,根据本技术的仿真口腔咀嚼装置设置在该温控设备7中,以控制仿真口腔的温度达到37℃。
57.唾液流加装置通过输送管路20与仿生口腔咀嚼装置连接,通过控制器1控制唾液流加装置逐渐向仿生口腔咀嚼装置中的食物上注入人工唾液。
58.如图所示,唾液流加装置包括唾液储存容器、唾液流加蠕动泵18和唾液推注器19,
唾液流加蠕动泵18用于将唾液储存容器中的人工唾液通过输送管路20泵送至仿生口腔咀嚼装置中。
59.进一步地,仿真口腔食物加工系统还包括温度保持装置,唾液储存容器浸泡于温度保持装置中,用于使唾液储存容器中的人工唾液保持恒温37
±
1℃。
60.并且,优选地,唾液流加装置输送人工唾液的流速为1~5ml/min。
61.本技术在仿生口腔食物加工系统中加入了脸颊系统和唾液流加装置,使体外口腔加工更加贴近真实的人体咀嚼过程,便于研究咀嚼过程中食物到食团的变化,为试验提供准确数据。
62.下面说明使用仿生口腔食物加工系统加工食物的操作过程,具体地,包括如下步骤:
63.步骤一,根据模拟目标人群的口腔状况进行牙齿模型的构建,如成人完整牙齿、儿童牙齿等;
64.步骤二,安装牙齿模型和脸颊模型;
65.步骤三,将所需加工的固体食物放置于仿生口腔咀嚼装置所形成的仿真口腔中;
66.步骤四,配制口腔唾液;
67.步骤五,开启仿生口腔咀嚼装置,使仿真口腔产生重复咀嚼运动;
68.步骤六,关闭仿生口腔咀嚼装置使仿真口腔停止咀嚼运动;
69.步骤七,启动唾液流加装置,将人工唾液逐渐注入到仿生口腔咀嚼装置中与食物充分混合;
70.步骤八,重复步骤二至步骤七,直至将食物转化为食团为止。
71.下面通过对比例来进一步说明本技术的仿生口腔食物加工系统。
72.图6示出了真人咀嚼、通过图5所示的仿生口腔食物加工系统咀嚼(简称本设备)以及不具有仿真脸颊的对照设备咀嚼后的食糜水分含量对比图。
73.表1、表2和表3分别示出了根据本技术的仿生口腔食物加工系统的参数s的设置、参数r的设置以及参数s和r设置对应的动作。并且,表中的deg表示角度。表3中的上颚(线性)动作诸如包括位置(position)、速度(speed)以及所需时间(required time)等。下颚(转动)动作诸如包括位置(position)、速度(speed)以及所需时间(required time)等。按照表中所设定的参数,仿生口腔咀嚼装置开始执行咀嚼程序。
74.并且,根据图7来设定张开的角度,例如12度。
75.将相同的米饭分别放在本技术的仿生口腔食物加工系统中和不带脸颊的设备中,从而对比食糜的水分含量。
76.表1.参数s的设置
[0077][0078]
表2.参数r的设置
[0079][0080]
表3.s&r参数设置对应的动作
[0081][0082]
实验分成真人咀嚼组、本设备组、对照设备组,分别咀嚼面包和馒头测试其水分含量,其中真人咀嚼组选择志愿者10~12名年龄在20~35岁之间,身体健康,无缺齿;本设备指采用本口腔模拟消化系统;对照设备指去除了本设备中的模拟脸颊设备。结果发现,真人咀嚼面包的水分含量为:(51.2
±
5.4)%、本设备咀嚼面包的水分含量为(52.6
±
4.5)%;对照设备咀嚼面包的水分含量为(45.1
±
2.1)%。真人咀嚼馒头的水分含量为(61.3
±
7.3)%;本设备咀嚼馒头的水分含量为(60.9
±
2.9)%;对照设备咀嚼馒头的水分含量为(48.13
±
3.2)%。由此可见,加了仿真脸颊的口腔模拟设备更有利于水分的保持,与真人咀嚼的情况更相似。同时,本设备可以保持系统温度控制在
±
2℃;食团水分含量标准偏差:
±
15%
[0083]
因此,本技术通过对模拟脸颊和口腔、驱动马达、旋转步进电机和唾液流加蠕动泵的编程控制,达到了咀嚼动作和唾液分泌动作的连续持续协调进行,实现了对人体咀嚼过程中挤压和研磨动作的准确模拟,更加真实的模拟了人体咀嚼过程中这两个过程的同时性,可动态模拟人体咀嚼过程中不同阶段的食团形成过程,为研究食物向食团的转化过程提供可能。
[0084]
并且,本技术可通过控制咀嚼动作的幅度和人工唾液的添加流速来模拟不同口腔生理条件下,食团形成过程的区别,具有适应性强和操控性强的优点,可推广应用在模拟多种固体食物或模拟多种人群的口腔加工的实验中。
[0085]
以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1