光伏太阳能板接线盒自动安装设备的制作方法
1.本实用新型涉及接线盒自动安装设备,具体为光伏太阳能板接线盒自动安装设备,属于光伏太阳能板接线盒安装技术领域。
背景技术:
2.光伏太阳能板接线盒介于太阳能电池组件构成的太阳能电池方阵和太阳能充电控制装置之间的连接装置,其主要作用是连接和保护太阳能光伏组件,将太阳能电池产生的电力与外部线路连接,传导光伏组件所产生的电流,在光伏太阳能板生产好之后需要安装接线盒。
3.目前光伏太阳能电池板领域,其安装接线盒部分还没有使用机器人上料,并安装接线盒。传统工艺都是人工取料,安装;由于该工艺结构限制,需要多人协作作业。这不仅需要消耗大量的人工,而且工作效率还很低,对企业的发展和运营都是不良的因素。
4.有鉴于此特提出本实用新型。
技术实现要素:
5.本实用新型的目的就在于为了解决上述问题而提供光伏太阳能板接线盒自动安装设备。
6.本实用新型通过以下技术方案来实现上述目的,光伏太阳能板接线盒自动安装设备,包括六轴机器人、夹持结构和太阳能电池板组件,所述夹持结构安装在六轴机器人的输出端上,所述太阳能电池板组件位于夹持结构下方,所述夹持结构包括导向滑动件、气缸和夹爪,所述导向滑动件包括导轨和滑块,所述滑块滑动在导轨上,所述夹爪固定在气缸输出端上。
7.进一步的,所述六轴机器人包括固定柱和旋转座一,所述旋转座一转动设置在固定柱上,所述固定柱的底部固定有底板。
8.进一步的,所述旋转座一的外部转动有旋转架一,所述旋转架一的内部转动有旋转架二。
9.进一步的,所述旋转架二的外部转动有旋转架三,所述旋转架三的内部转动有旋转座二。
10.进一步的,所述旋转座二的一端转动有旋转架四,所述旋转架四的内部转动有旋转座三。
11.进一步的,所述导轨一侧固定有安装板,所述安装板一侧固定有安装架,所述安装架固定在旋转座三上。
12.进一步的,所述太阳能电池板组件包括主板和物料件,所述物料件位于主板上。
13.进一步的,所述物料件包括物料一、物料二和物料三,所述物料二位于物料一和物料三之间。
14.本实用新型的技术效果和优点:(1)通过设置的夹持结构,夹持结构内的气缸能带
动夹爪对物料进行夹持,同时采用多个气缸配合夹爪对物料夹持,从而能操作一组接线盒(3个物料为一组)同时安装,同时采用的滑块滑动在导轨上,从而可调节3个物料之间的间距,兼容范围广;同步进行,快捷高效,又省去了人工成本;(2)采用6轴机器人搬运上料,可以使得搬运过程多位置,多角度识别,并精准安装到指定位置。
附图说明
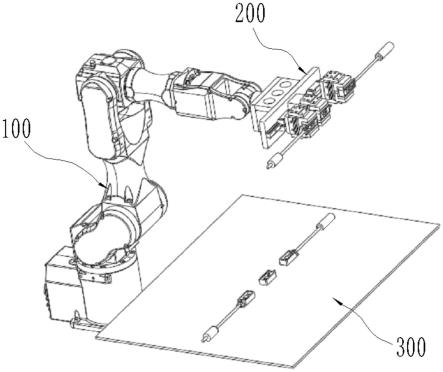
15.图1为本实用新型的整体结构示意图;
16.图2为本实用新型的爆炸结构示意图;
17.图3为本实用新型的夹具结构示意图一;
18.图4为本实用新型的夹具结构示意图二。
19.图中:100、六轴机器人;101、底板;102、固定柱;103、旋转座一; 104、旋转架一;105、旋转架二;106、旋转架三;107、旋转座二;108、旋转架四;109、旋转座三;200、夹持结构;201、安装架;202、安装板; 203、导向滑动件;2031、导轨;2032、滑块;204、气缸;205、夹爪;300、太阳能电池板组件;301、主板;302、物料件;3021、物料一;3022、物料二;3023、物料三。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1-4所示,光伏太阳能板接线盒自动安装设备,包括六轴机器人100、夹持结构200和太阳能电池板组件300,夹持结构200安装在六轴机器人100的输出端上,太阳能电池板组件300位于夹持结构200下方,夹持结构200包括导向滑动件203、气缸204和夹爪205,采用的气缸204 带动夹爪205对物料进行夹持,导向滑动件203包括导轨2031和滑块2032,滑块2032滑动在导轨2031上,由于滑块2032滑动在导轨2031上,可调节3个物料之间的间距,满足三个物料不同间距的安装,夹爪205固定在气缸204输出端上,采用多个气缸204配合夹爪205对物料夹持,从而能操作一组接线盒同时安装,导轨2031一侧固定有安装板202,安装板202 一侧固定有安装架201,安装架201固定在旋转座三109上。
22.作为本实用新型的一种技术优化方案,六轴机器人100包括固定柱102 和旋转座一103,旋转座一103转动设置在固定柱102上,固定柱102内的电机能带动旋转座一103转动,旋转座一103内的电机带动旋转架一104 转动,固定柱102的底部固定有底板101,旋转座一103的外部转动有旋转架一104,旋转架一104内转动连接有旋转架二105,旋转架二105内的两个电机分别连接旋转架一104和旋转架三106,旋转架一104的内部转动有旋转架二105,旋转架二105的外部转动有旋转架三106,旋转架三106的内部转动有旋转座二107,旋转座二107的两个电机能分别带动旋转座二 107转动和旋转架四108旋转,旋转座二107的一端转动有旋转架四108,旋转架四108的内部转动有旋转座三109,旋转座三109转动能带动安装架 201和安装板202转动。
23.作为本实用新型的一种技术优化方案,太阳能电池板组件300包括主板301和物料
件302,物料件302位于主板301上,物料件302包括物料一 3021、物料二3022和物料三3023,物料二3022位于物料一3021和物料三 3023之间。
24.本实用新型在使用时,将六轴机器人100通过底板101固定到指定位置,然后固定柱102内的电机能带动旋转座一103转动,旋转座一103内的电机带动旋转架一104转动,旋转架一104内转动连接有旋转架二105,旋转架二105内的两个电机分别连接旋转架一104和旋转架三106,旋转架三106内旋转有旋转座二107,旋转座二107的两个电机能分别带动旋转座二107转动和旋转架四108旋转,旋转架四108内转动连接有旋转座三109,旋转座三109转动能带动安装架201和安装板202转动,同时带动导向滑动件203、气缸204和夹持的物料件302进行夹持,采用的气缸204带动夹爪205对物料进行夹持,同时采用多个气缸204配合夹爪205对物料夹持,从而能操作一组接线盒同时安装,同时由于滑块2032滑动在导轨2031上,可调节3个物料之间的间距,满足三个物料不同间距的安装,兼容范围广;同步进行,快捷高效,又省去了人工成本。
25.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
26.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1