一种用于大型真空镀膜机工件挂板传送的侧机械手的制作方法
1.本实用新型涉及大型真空镀膜机内,特别是多舱配置的大型真空镀膜机内,负责完成大型工件挂板自动传送任务的一种机械手。
背景技术:
2.真空镀膜设备的技术发展趋势,一是提高产能和效率,二是提高镀膜产品质量和稳定性。为提高产能和效率,设备设计越来越大,装载量越来越多,单个工件挂具(多个工件挂装在挂具上一起完成镀膜)也越大越重;为提高膜层质量和稳定性,除了引入镀膜新技术、新工艺外,一个最基本的要求是控制好炉内镀膜气氛稳定不变,也就是要保证每炉炉内残留气体降低至最少并保持一致性不变。为此,最有效手段是每炉镀膜包括装卸工件都在真空中进行不破真空,这样各炉次都在同样真空环境下进行镀膜,炉内气氛不因破真空受大气污染,可保持炉间残留气氛的一致性,这样膜层质量和一致性都会大大提高。因此,近年来真空镀膜设备发展方面,一方面大型化,一方面是多舱化。
3.多舱配置时,其中镀膜工艺舱室始终保持真空状态,它通过真空阀门与进料舱和出料舱连接,在真空状态下工件从进料舱送入工艺舱(镀膜工艺舱室的简称),镀膜工艺完成后,再在真空状态下把工件移出到出料舱。设备的大型化,使装挂工件的挂具数量多,挂具体积大,装挂上工件后的挂具重量很重。这些挂具在真空状态下传送转舱,必须靠机械手完成。
4.为适应当前真空镀膜设备的发展趋势,研制真空机械手是当务之急。因为真空镀膜机的镀膜工件材质、大小、形状各异,所用工件挂具的大小、形状、数量也不同,另外,不同型号真空镀膜机的预备舱(主要指进料仓和出料仓)、过渡舱(用于连通进、出料仓与工艺舱)和工艺舱的设计也会不同,与之适应的挂具的传送方式也会有不同,因此机械手的动作和功能不尽相同,故机械手的设计五花八样。对于炉内可挂二十多块大尺寸、重量重的矩形平板式挂具(挂具尺寸300mmx1500mmx35mm,挂满工件时,重40kg左右)的大型真空镀膜设备,目前还没有能完成工件挂板自动传送任务的机械手。
技术实现要素:
5.本实用新型的发明目的是,提供一种用于大型多舱室真空镀膜机内大型挂板传送的侧机械手,该机械手用于将进料舱的挂板传送到输运舱或将输运舱的成品挂板传送到出料舱,即该机械手需要跨舱传送。
6.本实用新型的发明目的通过如下技术方案实现:一种用于大型真空镀膜机工件挂板传送的侧机械手,其设置在进料舱或出料舱中,用于将进料舱的挂板传送到输运舱或将输运舱的成品挂板传送到出料舱,其由动力组、直线模组和夹紧组件三部分组成;
7.所述夹紧组件竖向设置,其为一三层结构,包括中间的移动安装板、底层的底固定板,以及最前面的滑动爪部分,所述移动安装板滑动安装在一横置的导轨上,该导轨又可横向滑动的安装在所述底固定板上,即移动安装板通过双重导轨滑动安装在所述底固定板
上,所述移动安装板设有推动块,该推动块位于横置导轨两侧的限位块之间,与它们形成相抵结构,且该推动块位于移动安装板远离输运舱的一侧;
8.所述动力组与所述直线模组相连,所述直线模组与所述移动安装板相连,所述动力组提供动力,通过所述直线模组驱动所述移动安装板做直线往复运动;
9.所述滑动爪部分包括分设于所述移动安装板左右两侧的两滑动爪,两滑动爪在气缸的作用下相向或背向运动,实现挂板的抓取或放松。
10.直线模组带动移动安装板前伸,到达一定程度后,其上的推动块与横置导轨一侧的限位块相抵,推动横置导轨与移动安装板一起前伸直到移动安装板到达输送舱相应工位,完成任务后,直线模组带动移动安装板后退,退到一定程度后,其上的推动块与横置导轨另一侧的限位块相抵,推动横置导轨与移动安装板一起退出输送舱回到进料舱或出料舱的初始工位。由此可见,本实用新型可顺利完成挂板的跨舱传送。
11.两所述滑动爪的驱动结构如下:
12.两滑动爪通过横向导轨滑动安装在所述移动安装板上,两滑动爪具有左右相对的垂直部和底部向对侧延伸的连接板,连接板上设有斜槽,两滑动爪上的斜槽构成八字形或倒八字形(后面具体实施例中的为倒八字),所述移动安装板中部固定有一气缸,该气缸的输出轴上固连一驱动板,该驱动板中轴两侧对称的设有一组凸轮轴承,分套入对应侧的滑动爪的斜槽内。
13.本实用新型侧机械手在不同工位间的切换,采用了精度高、运动平稳的直线模组来传动,在对挂板的抓取方面,巧妙地运用凸轮轴承和斜槽的配合,将气缸的竖向运动转换成了两滑动爪的横向开合运动,实现了只通过一个动力部件同时控制两滑动爪。
14.所述滑动爪部分还包括夹紧块,其横截面呈u字形,设置在两滑动爪垂直部的相对侧。
15.有益效果:
16.本实用新型机械手控制精度高,能平稳、可靠地完成大型多舱室真空镀膜机内大型挂板(长度可达一米以上,挂满工件后,重量可达数十斤)的传送任务。
附图说明
17.图1为本实施例中大型多舱室真空镀膜机的布局图;
18.图2a
‑
2e为顶、底机械手的相关示意图,其中,图2a为进料舱侧面立剖视图,图2b为图2a的f处的放大图,图2c为图2a的e处的放大图,图2d为顶、底机械手的局部结构示意图一,主要反映运动组件支架、夹紧块安装板部分的装配结构,图2e为顶、底机械手的局部结构示意图二,主要反映倾斜滑板部分的装配结构;
19.图3a
‑
3b为进料舱侧机械手的相关示意图,其中,图3a为侧机械手的立体图,图3b为左视图;
20.图4a
‑
4c为送取挂板机械手的相关示意图,其中,图4a为送取挂板机械手的侧立视图,图4b为送取挂板机械手的立体图,图4c为送取挂板机械手的正视图(上、下爪板省去)。
具体实施方式
21.下面以一种大型多舱室真空镀膜机为例,详细说明本实用新型用于其真空环境中
的工件挂板传送的各种机械手的结构和动作过程。
22.一、设备舱室布局与工件挂板转舱流程
23.1.1舱室布局:见图1,镀膜设备的核心区是工艺舱,呈圆柱型,所有工件挂板靠近圆柱舱周壁竖立一周进行镀膜作业。工艺舱通过一翻板式阀门与正对阀门口的长方型输运舱连接,输运舱左侧为与之平行的且有连通口的进料舱,右侧与进料舱对称地为与输运舱平行的且有连通口的出料舱。
24.1.2工件挂板转舱流程
25.各舱室处于清空状态,炉外a机械臂开始工作,把工件挂板送入进料舱,见图1,进料舱装满挂板时,a机械臂停止工作,关进料舱门,抽真空到预置真空度,打开工艺舱阀门开始从进料舱向输运舱送料,再向工艺舱投料直至装满料为止,关工艺舱阀门,开始镀膜作业,同时,进料舱打开舱门,炉外a机械臂再次开始工作,把工件挂板送入进料舱,进料舱装满料后,a机械臂再次停止工作,关进料舱门,抽真空到预置真空度(出料舱门关闭),打开工艺舱阀门,进料舱、出料舱和输运舱的机械手一起工作,一边从工艺舱取料并送至出料舱,一边把进料舱的挂板移向工艺舱进行投料。
26.二、各舱室机械手及其转舱功能
27.(1)炉外机械臂a:进料舱的舱门外备有专用机械臂a,负责把装挂好工件的挂板逐块送入进料舱的挂板定位座板的准备槽坑上。然后返回再重复上述操作,直至送入最后一块挂板。
28.(2)挂板定位装置:挂板定位装置用于挂板排放定位,挂板稳定地置放其上并等待传送到下一工序。挂板定位组件分上、下两部份。下面部份是挂板定位座板,它固定在挂板定位座板固定板上,挂板定位座板分左、右两条,从舱门延伸到舱端尾。左右两定位座板的中间留出空间,让后面描述的顶、底机械手夹紧块机构从此空间移动。挂板定位座板上端面有多个挂板凹槽坑k,如图2a所示,让挂板底端插入其中定位。靠近舱门处为准备定位槽坑,随后为第一定位槽坑,顺序往后排到舱尾为最末定位槽坑。挂板上端的左、右两侧的舱壁置有挂板限位装置,不让挂板前后左右倾倒。
29.(3)进料舱顶、底机械手:进料舱从舱门至舱尾端安装有顶、底机械手,它分顶、底两部分对称结构,上下协同动作,负责把机械臂a送达靠近舱门的准备定位槽坑上的挂板送到指定的定位槽坑位置上;顶、底机械手分别从顶、底两端夹紧挂板,并最终把挂板抬高至高于定位座板,再通过前后平移运动,把其送到尾端方向指定的槽坑位处,随后顶、底机械手下降把挂板插入槽坑内,松开夹紧块,再返回舱门端,准备下一次操作。此时a机械臂再送来新的挂板到准备槽坑,顶、底机械手重复前述操作,一直至挂板装满定位座板上所有槽坑。
30.(3)进料舱侧机械手:进料舱的尾端安装有侧机械手,它负责把挂板从进料舱向右侧输运舱转移。侧机械手预先张开左右夹紧爪手,由顶、底机械手把进料舱排在最靠尾端定位槽坑上的挂板,从上、下夹紧并抬高至高于定位座槽坑上端面的位置,再向尾端方向移送,一直送到侧机械手左、右夹紧爪手位置,左、右夹紧爪手合拢抱紧挂板,顶底机械手夹紧上、下块松开,并整体后退。侧机械手把挂板右移横穿过与输运舱的连通口进入输运舱。
31.(4)输运舱送取挂板机械手:进料舱侧机械手把挂板送到输运舱送取挂板机械手的前面的交接位置时停止,送取挂板机械手前移,使其上、下夹紧块达到挂板的上、下板端,
上、下夹紧块合拢夹持挂板,侧机械手则松开左、右夹持爪手并退回进料舱。此时工艺舱与输运舱连通的翻板阀门已打开,送取挂板机械手前移,把挂板送进工艺舱,对准工艺舱内的挂板相应工位,并让挂板与工件转架装挂牢固后,送取挂板机械手松开夹紧块,然后退出工艺舱。工艺舱内的工件转架运动机构转动,当已完成镀膜的挂板转到正对舱门的位置时,停止转动,送取挂板机械手再次向前进入工艺舱,进而靠近已镀膜的挂板,其上、下夹紧块动作夹紧挂板,并提起挂板脱离工件转架后,夹着挂板退出工艺舱,回到输运舱前述的交接位置停止。
32.(5)出料舱侧机械手:出料舱的尾端安装有侧机械手,它负责把已镀膜的挂板从左侧输运舱向右侧出料舱转移。当输运舱的送取挂板机械手把已镀膜挂板移至交接位置,右边出料舱侧机械手向输运舱方向移动,到达前述交接位置停止,此前其左、右夹紧爪已张开,送取挂板机械手把夹持的挂板稍向前推送至侧机械手,随即后者左、右夹紧爪从挂板的左、右两边夹紧挂板,然后送取挂板机械手松开上下夹紧块并向后退,侧机械手夹持已镀膜挂板向右平移返回出料舱原位。
33.(6)出料舱顶、底机械手:出料舱安装有与进料舱配置一样的可从靠舱门至舱尾端运动的顶、底机械手,它分顶、底两部分对称结构,上下协同动作,负责把出料舱侧机械手从左侧输运舱转移过来的已镀膜挂板送达定位座装置的指定槽坑。顶、底机械手先平移到舱尾侧机械手前面,顶、底机械手顶、底两端夹紧块动作夹紧挂板,随即侧机械手松开左、右夹持爪,顶底机械手夹持已镀膜挂板平移后退至指定的定位座位槽坑,把挂板下降安放至定位凹槽内,松开顶、底夹紧块。再重复上述操作,从侧机械手处逐片转移挂板,直至把已镀挂板排满全部定位座槽坑。
34.(7)炉外b机械臂:出料舱的舱门外备有专用b机械臂,负责把处于出料舱的定位座准备槽坑处的已镀挂板取出移至炉外工作台上。当出料舱排满已镀膜挂板后,破真空打开出料舱门。顶、底机械手从定位座第一槽位开始按顺序向后逐块把已镀膜的挂板转移到靠近舱门的准备槽坑,b机械臂动作,从出料舱逐块取出已镀膜挂板;顶、底机械手与b机械手协同动作,直至取出最后一块已镀膜挂板。
35.三、各机械手的结构和运动
36.3.1炉外机械臂a:外购件,结构省略。
37.3.2进料舱顶、底机械手
38.进料舱顶、底机械手的结构如图2a
‑
2c所示。图2a为进料舱侧面立剖视图,显示机械臂a与该顶、底机械手协同将挂板投料入进料室的过程。图示顶机械手装在舱室顶部,底机械手装在舱室底部,顶、底机械手配合工作。两组机械手本身为对称结构,各自由两套传送单元构成。进料舱顶、底机械手的传送单元主要包括三个组件:动力组件1s、直线模组2s和运动组件3s。图中4为挂板,处于炉外。
39.动力组件1s:处于直线模组2s的左端头且与之连接,为直线模组2s提供动力。动力组件1s主体安装在舱尾后壁外。
40.图2b为图2a的f处的放大图,显示动力组件1s的结构,它包括电机1
‑‑
1、联轴器1
‑
2、密封磁流体1
‑
3、电机固定板1
‑
4、电机支撑杆1
‑
5、联轴器(2)1
‑
6。电机1
‑‑
1固定在电机固定板1
‑
4上,电机固定板1
‑
4固定在电机支撑杆1
‑
5的左端头上,电机支撑杆1
‑
5有四支杆体,均布固连在舱外壁上。电机1
‑‑
1右端的电机轴通过联轴器1
‑
2与密封磁流体1
‑
3左端轴连
接,密封磁流1
‑
3穿过舱壁,其右端轴伸入舱内,通过联轴器(2)1
‑
6与直线模组2s的左端传动轴连接。电机1
‑
1正、反转动带动直线模组2s的螺杆正、反转,使套在其上的螺母拖动固定在螺母上的滑块前后平移。
41.直线模组2s为标准产品,属于外购件,其用于把电机1
‑
1的正反转运动变为其滑块的直线前后平移运动,其结构省略。顶、底两套直线模组2s均从舱门口延伸至舱尾,分别安装在舱顶板和舱底板上。
42.运动组件3s:它负责夹持挂板平移到指定的定位座槽坑上。运动组件整体固连在直线模组的滑块上,实现前后平移。运动组件自身结构可驱动其夹紧块上升或下降,从而实现夹紧或松开挂板。
43.图2c为图2a的e处的放大图,显示运动组件结构,主要包括真空电机3
‑
1、联轴器(1)3
‑
2、丝杆轴承座(1)3
‑
3、丝杆螺母3
‑
4、丝杆3
‑
5、丝杆轴承座(2)3
‑
6、直线轴承3
‑
7、导柱3
‑
8、夹紧块3
‑
9、倾斜滑板3
‑
10、斜板滑块3
‑
11、倾斜导轨、运动组件支架3
‑
12、支架底板3
‑
12
‑
1、支架上板3
‑
12
‑
2、电机固定立板3
‑
12
‑
3、支架上板导轨、丝杆螺母连接板3
‑
13、丝杆螺母连接板滑块3
‑
14、斜板滑块连接板3
‑
15、夹紧块安装板3
‑
16、直线轴承底座3
‑
17、直线模组滑块连接板3
‑
18、直线模组滑块3
‑
19。
44.运动组件支架3
‑
12呈长方形,它搭载着整个运动组件3,如图2d所示,它包括支架底板3
‑
12
‑
1、支架上板3
‑
12
‑
2和两侧板。左侧板位于支架底板3
‑
12
‑
1的左端,右侧板位于支架底板3
‑
12
‑
1中部偏右,支架上板3
‑
12
‑
2横跨在两侧板上,宽度明显窄于支架底板3
‑
12
‑
1,以在支架底板3
‑
12
‑
1两侧留出直线轴承3
‑
7的安装位。支架底板3
‑
12
‑
1它右端侧板继续往右为其延伸段,其上固连着电机固定立板3
‑
12
‑
3。电机固定立板3
‑
12
‑
3侧视图呈三角形,由垂直连接的底板、侧安装板以及两三角加强板构成。真空电机3
‑
1固定在电机固定立板3
‑
12
‑
3右边,支架底板3
‑
12
‑
1的底面与直线模组滑块连接板3
‑
18固连,后者与直线模组滑块3
‑
19固连,直线模组滑块3
‑
19移动,带动整个运动组件3左右平移。运动组件支架3
‑
12的两侧板分别固定有丝杆轴承座(1)3
‑
3和丝杆轴承座(2)3
‑
6,上述两轴承座支承着丝杆3
‑
5,丝杆3
‑
5从右侧丝杆轴承座(1)3
‑
3穿出,通过联轴器(1)3
‑
2与真空电机3
‑
1的转轴连接。丝杆3
‑
5套有丝杆螺母3
‑
4,丝杆螺母3
‑
4后侧固连螺母连接板3
‑
13,它呈倒l形,倒l弯向支架上板3
‑
12
‑
2,在螺母连接板3
‑
13上弯出部下端面固连滑块3
‑
14,后者扣在支架上板3
‑
12
‑
2上端面上的支架上板导轨上,呈滑动连接。如图2e所示,螺母连接板3
‑
13的背后固连倾斜滑板3
‑
10,其后背沿倾斜端面镶有倾斜导轨,倾斜滑块3
‑
11套在倾斜滑板3
‑
10的倾斜导轨上,两者滑动连接,倾斜滑块3
‑
11背后固连倾斜滑块连接板3
‑
15,其上端面与夹紧块安装板3
‑
16下端面固连,夹紧块3
‑
9固定在夹紧块安装板3
‑
16的上端面正中。倾斜滑块连接板3
‑
15的两侧设置有直线轴承3
‑
7,直线轴承3
‑
7的底座固定在支架底板3
‑
12
‑
1上,直线轴承轴套的上端面固连在夹紧块安装板3
‑
16的下端面,直线轴承导向柱3
‑
8穿在直线轴承轴套内,两者滑动连接,起升降导向稳定平衡作用。
45.运动组件的运动:真空电机得到信号随即转动,通过联轴器带动丝杆转动,电机正转或反转驱动丝杆正转或反转,套在其上的丝杆螺母其后侧固连倒l形的螺母连接板,该板上端固连滑块,滑块扣在支架上板的导轨上,该结构限制着丝杆螺母只能做向左或右的直线平移运动。固连在螺母连接板后面的是倾斜滑板,它也随着丝杆螺母平移。倾斜滑板背面安装有倾斜滑板导轨,有倾斜滑块与其相配,倾斜滑块背后与倾斜滑块连接板固连,后者又
与夹紧块安装板固连,这样倾斜滑块受限制不能作水平移位。当丝杆螺母左移带动倾斜滑板左移,逼使倾斜滑块在原有水平座标位置上沿着倾斜滑轨从低向高上升,即通过倾斜滑块连接板一起把夹紧块安装板抬起,使后者上的夹紧块升高;同时夹紧块安装板也带动安装在两侧旁的直线轴承运动,即直线轴承轴套抱着直线轴承导柱上升,保证夹紧块安装板平稳上升。当丝杆螺母右移带动倾斜滑板右移,逼使倾斜滑块沿着倾斜导轨从高向低下降,即通过倾斜滑块连接板一起把夹紧块安装板降低,其上的夹紧块下降;同时夹紧块安装板也带动安装在两侧旁的直线轴承运动,即直线轴承轴套抱着直线轴承导柱下降,保证夹紧块平稳下降。
46.顶、底机械手分顶机械手和底机械手上下两套对称安装,并两套协同动作。要搬移某挂板,该挂板定位在左、右定位座板的某对应槽坑上,顶机械手和底机械手同时到达该挂板的槽坑位置,上、下夹紧块对准挂板,底机械手的夹紧块向上抬,而顶机械手的夹紧块向下伸,从而夹紧挂板,且底机械手上抬行程要多一些(底机械手的直线导轨具有较大的倾斜度),需将挂板上举高于槽位的最高顶面,好让挂板前后平移。
47.顶、底机械手夹好挂板后,顶、底直线模组同步运动,将运动组件及挂板平移到指定槽位,运动组件的底部夹紧块下降,挂板坐在左、右定位座板的槽坑上,底部夹紧块继续下降,顶部夹紧块上升,完全松开挂板。
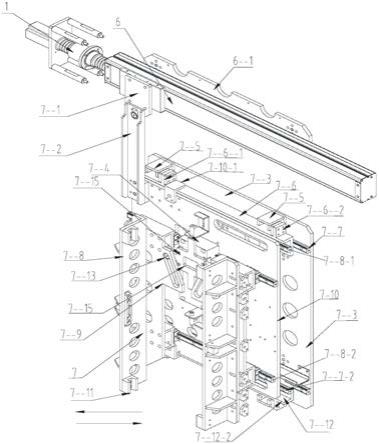
48.3.3进料舱侧机械手
49.图3a
‑
3b为侧机械手结构示意图,图3a为侧机械手的立体图,图3b为左视图。侧机械手分别对称地装在进料舱尾侧壁和出料舱尾侧壁,两者为对称的结构,它们与顶、底机械手或输运舱内的送取挂板机械手配合工作。侧机械手主要由动力组、直线模组、夹紧组件三部件组成。由动力组提供动力,驱动直线模组实现夹紧组件整体左右移动。
50.1y为动力组,6为直线模组(外购标准件),6
‑
1为模组固定板,固定在舱后壁上。直线模组6固定在模组固定板6
‑
1上。动力组1y与直线模组6的轴端头固连,带动直线模组6的滑块移动。
51.7为夹紧组件,其为一三层结构。最底层为底固定板部分,中间层是活动安装板部分,最前面层是滑动爪部分。各层间都是通过滑块/导轨组件实现滑动连接。夹紧组件7结构稍显复杂,因为滑动爪必须夹持挂板从进料舱移送至输运舱的送取挂板机械手的正前方,滑动爪是依赖滑块/导轨组件的配合来实现移动的,故导轨必须伸到送取挂板机械手正前方,并在挂板送达后,上述导轨又必须退回原位,以便不会阻挡送取挂板机械手夹持挂板前移,所以该处的导轨必须是可伸缩的。为此,本实用新型设计了一段固定的导轨,再在其上面滑动连接一组滑块/导轨组件,后者就成可伸缩导轨。
52.底固定板部分主要包括底固定板7
‑
3、上底固定板导轨滑块7
‑3‑
1、上底固定板导轨7
‑3‑
2、下底固定板导轨7
‑3‑
3、下底固定板导轨滑块7
‑3‑
4和限位块7
‑
5。
53.底固定板7
‑
3固连在舱尾后舱壁上,底固定板7
‑
3的前板面靠上和靠下两板端部,分别固定上底固定板导轨7
‑3‑
2和下底固定板导轨7
‑3‑
3,而上底固定板导轨滑块7
‑3‑
1和下底固定板导轨滑块7
‑3‑
4分别扣住上底固定板导轨7
‑3‑
2和下底固定板导轨7
‑3‑
3滑动连接。限位块7
‑
5固定在底固定板7
‑
3的上端部。
54.中间层的活动安装板部分主要包括连接板(1)7
‑
1、连接板(2)7
‑
2、气缸7
‑
4、上导轨安装板7
‑
6、上导轨后限位块7
‑6‑
1,上导轨前限位块7
‑6‑
2,上导轨滑块7
‑7‑
1、下导轨滑
块7
‑7‑
3、上导轨7
‑
7、下导轨7
‑7‑
2、下导轨安装板7
‑
12、下导轨后限位块(未画出)、下导轨前限位块7
‑
12
‑
2、移动安装板7
‑
10、推动块7
‑
10
‑
1、凸轮轴承7
‑
13、驱动板7
‑
15、上滑动爪导轨7
‑8‑
1和下滑动爪导轨7
‑8‑
2。
55.活动安装板结构如下:连接板(1)7
‑
1固连在直线模组6的滑块上,连接板(2)7
‑
2上端固连连接板(1)7
‑
1、下端固连移动安装板7
‑
10,移动安装板7
‑
10的背面上、下端部分别固连上导轨滑块7
‑7‑
1和下导轨滑块7
‑7‑
3,它们分别扣住上导轨7
‑
7和下导轨7
‑7‑
2,呈滑动连接,而上导轨7
‑
7和下导轨7
‑7‑
2分别固连在上导轨安装板7
‑
6和下导轨安装板7
‑
12上。上述两导轨安装板的首尾端都置有限位块,即上导轨后限位块7
‑6‑
1,上导轨前限位块7
‑6‑
2,下导轨后限位块和下导轨前限位块7
‑
12
‑
2。在上导轨安装板7
‑
6和下导轨安装板7
‑
12背后又分别固连前述上底固定板导轨滑块7
‑3‑
1和下底固定板导轨滑块7
‑3‑
4。通过两重滑块/导轨组件使移动安装板7
‑
10可相对于底固定板7
‑
3作滑动,而且上、下导轨安装板7
‑
6和7
‑
12可向右伸出或退回。7
‑
10
‑
1为上推动块,它固定在移动安装板7
‑
10的上顶边上,并处于上导轨安装板7
‑
6的上导轨后限位块7
‑6‑
1与上导轨前限位块7
‑6‑
2之间。同样,7
‑
10
‑
2为下推动块,它固定在移动安装板7
‑
10的下底边上,并处于下导轨安装板7
‑
12的下导轨后限位块与下导轨前限位块7
‑
12
‑
2之间。移动安装板7
‑
10前板面中上部固定有上下运动的气缸7
‑
4,该气缸轴固连驱动板7
‑
16,该驱动板7
‑
16中轴两侧安装有凸轮轴承7
‑
13。在移动安装板7
‑
10的前板面,横置有上滑动爪导轨7
‑8‑
1和下滑动爪导轨7
‑8‑
2。
56.最前面层滑动爪部分主要包括滑动爪7
‑
8、连接板(3)7
‑
9、夹紧块7
‑
11、上滑动爪滑块7
‑8‑
3和下滑动爪滑块7
‑8‑
4。
57.移动安装板7
‑
10的前面是滑动瓜7
‑
8,它分左右对称两部分。滑动爪7
‑
8左右两部份的背面,在对应着上述移动安装板7
‑
10的横置上滑动爪导轨7
‑8‑
1和下滑动爪导轨7
‑8‑
2的位置上,固连上滑动爪滑块7
‑8‑
3和下滑动爪滑块7
‑8‑
4,上述滑块和导轨相扣滑动连接。7
‑
11为夹紧块,分左右上下对称共四块,固连在滑动爪7
‑
8的顶、底部相对侧端。滑动爪7
‑
8左右相向固连有连接板(3)7
‑
9,两者均开挖有从上向下倾斜朝向中轴方向的斜槽,上述固定在移动安装板7
‑
10上的凸轮轴承7
‑
13套入上述斜槽内,呈滑动连接。
58.夹紧组件的运动:
59.1)滑动爪夹持挂板:
60.进料舱侧机械手处于起始位置,先行张开滑动爪。当有信号输入气缸轴下行推动驱动板下移,驱动板两侧凸轮轴承随着沿朝向中轴方向斜槽下行,即把滑动爪左右向外推开,安装在滑动爪背后的上下滑动瓜滑块、与安装在移动安装板上的上下滑动爪导轨配合作滑动导向,张开左右两边的夹紧块。由进料舱顶、底机械手把挂板送到侧机械手左右夹紧块位置,侧机械手有信号输入汽缸轴上提,拉动驱动板上抬,驱动板两侧凸轮轴承随着沿离开中轴方向斜槽上行,即把左右滑动爪向内收拢,安装在滑动爪背后的上下滑动爪滑块、与安装在移动安装板上的上下滑动爪导轨配合作滑动导向,左右滑动爪合拢,左右两边的夹紧块夹持紧抱挂板。顶、底机械手上下夹紧块松开,并整体后退。
61.2)侧机械手右移:
62.启动直线模组向右移动,通过连接板(1)和连接板(2)带动移动安装板向右移动,底固定板固定不动,移动安装板与搭载着的滑动爪组件一起,通过安装在其背后的滑块/导轨组件以及底固定板滑块/底固定板导轨组件这双重滑动组件向右滑移。开始,通过连接板
(1)、(2)拖动移动安装板右移,是移动安装板背面上的上、下导轨滑块沿着上、下导轨安装板上的上、下导轨滑动右移。移动安装板上、下板端边上的推动块跟着右移,当移动安装板右移到上述推动块碰触到上、下导轨安装板上的右限位块时,连接板(1)、(2)拖动移动安装板继续右移,则推动块推着上、下导轨安装板右移,亦即上、下导轨安装板背后的滑块沿着底固定板上的导轨向右移动,上下导轨安装板向右延伸,直至上、下导轨安装板上的左限位块碰触到底固定板上的限位块,右移停止。此时上、下导轨向右伸到极限,也即移动安装板向右移动至极限。此时滑动爪应到达输运舱的预定挂板交接位置。
63.3)滑动爪松开挂板:
64.滑动瓜到达预定位置后,送取挂板机械手前移夹紧挂板。侧机械手的滑动爪按相反程序操作:当有信号输入气缸轴下行推动驱动板下移,驱动板两侧凸轮轴承随着沿朝向中轴方向斜槽下行,即把滑动爪左右向外推开,安装在滑动爪背后的上下滑动爪滑块、与安装在移动安装板上的上下滑动爪导轨配合作滑动导向,松开左右两边的夹紧块。
65.4)侧机械手左移:
66.首先夹持着挂板的送取挂板机械手稍后退,让出侧机械手左移空间。侧机械手动力组反向驱动,让直线模组左移,通过连接板(1)和连接板(2),带动移动安装板向左移动。底固定板固定不动的,移动安装板与搭载着的滑动爪组件,通过安装在其背后的滑块/导轨组件以及底固定板滑块/底固定板导轨组件这双重滑动组向左滑移。开始,连接板(1)、(2)拖动移动安装板左移,是移动安装板背面上的上、下导轨滑块沿着向右延伸的上、下导轨安装板上的上、下导轨滑动左移的。移动安装板上、下板端边上的推动块跟着左移,当移动安装板左移到上述推动块碰触到上、下导轨安装板上的左限位块时,连接板拖动移动安装板继续左移则推动块推着上、下导轨安装板左移,亦即上、下导轨安装板背后的滑块沿着底固定板上的导轨向左移动,上、下导轨安装板向左回缩,直至上、下导轨安装板上的右限位块碰触到底固定板上的限位块,左移停止。此时上、下导轨向左回缩到原始位置,也即移动安装板向左移动回至原位。
67.3.4输运舱送取挂板机械手
68.图4a
‑
4c为送取挂板机械手的相关示意图,其中,图4a为侧立视图,图4b为立体图,图4c为正视图(上、下爪板省去)。
69.送取挂板机械手位于输运舱,送取挂板机械手底座安装在舱底板上,送取挂板机械手对着工艺舱门前后运动,并与两侧机械手配合工作,将进料舱转来的挂板送至工艺室内,及从工艺舱取挂板再转至出料舱。送取挂板机械手主要由动力组、直线模组组件、夹瓜组件三部份组成。
70.1h为动力组(外购件),8为直线模组(外购件)。动力组1h转轴与直线模组8的左端轴头连接,为其提供动力,驱动直线模组组件带动夹爪组件整体前后移动。
71.直线模组组件包括直线模组8、模组固定板(2)8
‑
1、导轨固定座8
‑
2、导轨8
‑
3。模组固定板(2)8
‑
1固定在输运舱底板上,其上固连直线模组8,其右侧为与之平行的导轨固定座8
‑
2,其固定在模组固定板(2)8
‑
1的另一侧上。导轨8
‑
3固定在导轨固定座8
‑
2上。直线模组8的滑台平面上有移动滑块。
72.夹爪组件分为移动支架和上、下爪板机构两部分:
73.移动支架包括立架9
‑
1、支架9
‑
2、竖向导轨9
‑
5、驱动主板9
‑
6、凸轮轴承9
‑
13、h气
缸9
‑
7、横向导轨9
‑
8、横向滑块9
‑8‑
1、连接组9
‑
9。
74.立架9
‑
1是用板材焊成的直角梯形体,由6个面构成,并设有多处镂空,其底板固连滑块,扣在导轨8
‑
3上,呈滑动连接。该架子9
‑
1下侧靠底端处固连连接组9
‑
9,它固定在直线模组8的滑块上。立架9
‑
1的正前面固连着向前伸出的支架9
‑
2,支架9
‑
2也是用板材焊成,侧视图呈等腰梯形,包括平行的前端面和背面,前端面分断成上下两部分,每部分分别通过中间面连接背面,两中间面中部由h形的框架连在一起,该h形框架两前端脚形成外翻边,由支架9
‑
2的前端面看,h形框架及其外翻边设置在前端面的分断处内侧,支架9
‑
2的多个面上也分别设有镂空结构。支架9
‑
2正前端面中部的分断内即h形框架的横架上安装有h气缸9
‑
7,h气缸9
‑
7拖住位于其前面的驱动主板9
‑
6运动。驱动主板9
‑
6的背板面上下两端均固连横向滑块9
‑8‑
1,横向滑块9
‑8‑
1扣住横置固定在支架9
‑
2上的两条横向导轨9
‑
8上,呈滑动连接,具体平行于h气缸9
‑
7的输出轴固定在h形框架的两外翻边上。驱动主板9
‑
6的横中轴线两侧安装有凸轮轴承9
‑
13。支架9
‑
2上部和下部均固连有两条平行竖向滑轨9
‑
5。
75.上、下爪板机构包括上爪板9
‑
3、上爪板竖向滑块、下爪板9
‑
4、下爪板竖向滑块、夹紧块9
‑
11。
76.上爪板9
‑
3位于支架9
‑
2前端面前方,它占上半部分,前面呈平板形,其靠上部两侧有护板和上顶端弯板,上顶端弯板处固定夹紧块9
‑
11。上爪板9
‑
3上部背面对应支架9
‑
2上的两条平行竖向导轨9
‑
5处,上下分别固连四只上爪板竖向滑块,扣住竖向导轨9
‑
5,滑动连接;上爪板9
‑
3在对应驱动主板9
‑
6靠上面的凸轮轴承9
‑
13处,开有从左向右倾斜向上的斜槽9
‑3‑
3,凸轮轴承9
‑
13套在斜槽内。
77.下爪板9
‑
4位于支架9
‑
2前端面前方,它占下半部分,前面呈平板形,其结构与上爪板9
‑
3反向对称。即下爪板9
‑
4靠下部两侧有护板和下底端弯板,下底端弯板处固定夹紧块9
‑
11。下爪板9
‑
4下部背面对应支架9
‑
2上的两条平行竖向滑轨9
‑
5处,上下分别固连四只下爪板竖向滑块扣住导轨9
‑
5,呈滑动连接。下爪板9
‑
4对应驱动主板9
‑
6靠下面的凸轮轴承9
‑
13处,开有从左向右倾斜向下的斜槽9
‑4‑
3,凸轮轴承9
‑
13套在斜槽内。
78.送取挂板机械手的运动:动力组1h转轴与直线模组8的左端轴头连接,为其提供动力。动力组1h转轴正转动或反转,驱动直线模组8的滑块沿滑台前进或后退。该滑块通过连接组9
‑
9拖动置于与直线模组8平行的导轨8
‑
3上的立架9
‑
1一起移动,亦即实现夹爪组件整体前后移动。立架9
‑
1通过支架9
‑
2向前伸,并支承着夹爪组件主要部件。通过h气缸9
‑
7的气缸轴横向伸缩,拖动驱动主板9
‑
6运动,该运动受驱动主板9
‑
6后面连接的滑块和导轨导向,从而左右滑动。驱动主板9
‑
6的上下部各装有凸轮轴承9
‑
13,它们分别套入上、下爪板9
‑
3、9
‑
4的斜槽9
‑3‑
3、9
‑4‑
3内。上爪板的9
‑
3斜槽9
‑3‑
3从左至右向上倾斜,而下爪板9
‑
4则从左至右向下倾斜。上、下瓜板9
‑
3、9
‑
4背面分别固连四只滑块扣住安装在支架9
‑
2上的双竖向导轨,促使上、下爪板9
‑
3、9
‑
4运动导向。当驱动主板9
‑
6从右向左移动,迫使上爪板9
‑
3向上移动,下爪板9
‑
4向下移动,结果拉开(松开)上下夹紧块9
‑
11。当驱动主板9
‑
6从左向右移动,迫使上爪板9
‑
3下降,下爪板9
‑
4上升,结果靠拢(夹紧)上下夹紧块9
‑
11,实现抓取。
79.3.5出料舱侧机械手
80.出料舱侧机械手与进料舱侧机械手为左右对称结构,且动作类似,不再重复。
81.3.6出料舱顶、底机械手
82.出料舱顶、底机械手与进料舱顶、底机械手是相同的,其动作也类似,它负责把侧
机械手转移来的已镀膜的挂板,逐块移到相应槽位,直到排满舱。不再重复。
83.3.7炉外机械臂b:外购件,结构省略。
84.四、本实施例真空镀膜机的特点
85.1)通过炉内五套机械手协调工作,实现在大型真空镀膜机内大型挂板式冶具在真空环境下全自动同时送取转舱作业,设计处理巧妙,设备产能大,自动化程度高,工作效率高,而且机械手控制精度高,动作平稳、可靠;
86.2)可保持镀膜工艺舱始终在不破真空状态下工作,不受大气污染,确保镀膜气氛一致,保证膜层质量稳定性高、重复性好。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1