AGV的电池拆装机构及电池拆卸方法与流程
agv的电池拆装机构及电池拆卸方法
技术领域
1.本申请涉及物流运输技术领域,尤其涉及一种agv的电池拆装机构及电池拆卸方法。
背景技术:
2.随着社会的发展,物流系统越来越自动化和智能化。在当前的物流分拣与运输作业中,需要用到大量的agv(automated guided vehicle)的缩写,意即“自动导引运输车”,是一种能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。
3.agv通常采用自身所携带的电池提供电力,当电池的电力临近枯竭时需要及时补充,因此系统中需要配套对agv的自动供电设备。
4.相关技术中,已经出现了一些用于更换agv的电池模块的设备。如何使电池模块与更换电池的设备快速、准确地定位,以提升电池模块更换效率是一个亟待解决的问题。
技术实现要素:
5.本申请实施例提供一种agv的电池拆装机构及电池拆卸方法,以解决上述问题。
6.本申请实施例采用下述技术方案:
7.第一方面,本申请实施例提供了一种agv的电池拆装机构,包括抵接台、粗定位模块、精定位模块以及解锁模块,所述粗定位模块、所述精定位模块以及所述解锁模块均设置在所述抵接台上;
8.所述抵接台具有抵接面,所述粗定位模块包括与agv的电池模块上的粗定位孔的位置相对应的粗定位柱,所述粗定位柱凸出于所述抵接面,当所述抵接面与agv的电池模块抵接时,所述粗定位柱能够伸入粗定位孔内;
9.所述精定位模块包括精定位动力单元以及与agv的电池模块上的精定位孔的位置相对应的精定位柱,所述精定位柱能够在所述精定位动力单元的驱动下凸出于所述抵接面或者缩回至所述抵接面下方,且当所述精定位柱凸出于所述抵接面时能够伸入精定位孔内,所述精定位柱与精定位孔所形成的环隙宽度小于所述粗定位柱与粗定位孔所形成的环隙宽度;
10.所述解锁模块包括解锁动力单元以及与agv的电池模块上的锁紧模块的位置相对应的解锁顶杆,所述解锁顶杆能够在所述解锁动力单元的驱动下凸出于所述抵接面或者缩回至所述抵接面下方,且当所述解锁顶杆凸出于所述抵接面时能够解锁锁紧模块。
11.可选地,上述的agv的电池拆装机构中,
12.包括多个所述粗定位模块,多个所述粗定位模块沿agv的电池模块的一条对角线分布;
13.和/或
14.包括多个所述精定位模块,多个所述精定位模块沿agv的电池模块的另一条对角线分布。
15.可选地,上述的agv的电池拆装机构中,所述抵接台还具有滚珠单元,所述滚珠单元凸出设置在所述抵接面上。
16.可选地,上述的agv的电池拆装机构中,所述电池拆装机构还包括电池模块检测传感器,所述电池模块检测传感器设置在所述抵接台上,用于检测所述抵接台上是否存在agv的电池模块。
17.可选地,上述的agv的电池拆装机构中,所述电池拆装机构还包括拉动模块,所述拉动模块包括拉钩以及拉钩动力单元,所述拉钩凸出于所述抵接面,所述拉钩动力单元用于驱动所述拉钩转动并勾住agv的电池模块。
18.可选地,上述的agv的电池拆装机构中,所述电池拆装机构还包括弹性顶紧模块,所述抵接台、所述解锁模块以及所述弹性顶紧模块的数量均与agv的电池模块上的锁紧模块的数量相同,每个所述抵接台均设置一个所述解锁模块,并且每个所述抵接台分别被不同的所述弹性顶紧模块托起。
19.可选地,上述的agv的电池拆装机构中,所述电池拆装机构还包括顶紧传感器,用于检测至少一个所述抵接台是否被压迫至预定位置。
20.可选地,上述的agv的电池拆装机构中,所述电池拆装机构还包括行走模块,所述行走模块与所述抵接台相连,用于带动所述抵接台水平移动至agv的电池模块的下方。
21.可选地,上述的agv的电池拆装机构中,包括多个所述行走模块,每个所述行走模块分别带动一部分所述抵接台水平移动。
22.可选地,上述的agv的电池拆装机构中,包括两个所述行走模块,两个所述行走模块相对移动。
23.第二方面,本申请实施例提供了一种agv的电池拆卸方法,包括下列步骤:
24.对agv的电池模块进行水平方向的定位;
25.通过解锁模块解锁agv的电池模块上的锁紧模块;
26.在竖直方向上将电池模块与agv相互远离,使电池模块由agv的下方脱离agv。
27.可选地,上述的agv的电池拆卸方法中,所述对agv的电池模块进行水平方向的定位的步骤具体包括:
28.对agv的电池模块进行水平方向的粗定位;
29.对agv的电池模块进行水平方向的精定位。
30.可选地,上述的agv的电池拆卸方法中,
31.所述对agv的电池模块进行水平方向的粗定位的步骤具体为:将粗定位柱由下方伸入电池模块的粗定位孔,对agv的电池模块进行水平方向的粗定位;
32.所述对agv的电池模块进行水平方向的精定位的步骤具体为:将精定位柱由下方伸入电池模块的精定位孔,对agv的电池模块进行水平方向的精定位;
33.所述精定位柱与精定位孔所形成的环隙宽度小于所述粗定位柱与粗定位孔所形成的环隙宽度。
34.可选地,上述的agv的电池拆卸方法中,
35.所述将粗定位柱由下方伸入电池模块的粗定位孔,对agv的电池模块进行水平方向的粗定位的步骤具体为:
36.在电池模块沿竖直方向与位于其下方的抵接台的抵接面发生相对移动并接近的
过程中使粗定位柱由下方伸入电池模块的粗定位孔,对agv的电池模块进行水平方向的粗定位,且电池模块完成水平方向的粗定位时与抵接面抵接;
37.所述将精定位柱由下方伸入电池模块的精定位孔,对agv的电池模块进行水平方向的精定位的步骤具体为:
38.将精定位柱由抵接面的下方向凸出于抵接面的方向移动并伸入电池模块的精定位孔,对agv的电池模块进行水平方向的精定位。
39.可选地,上述的agv的电池拆卸方法中,所述在电池模块沿竖直方向与位于其下方的抵接台的抵接面发生相对移动并接近的过程中,
40.电池模块将抵接台向下压迫并使与抵接台连接的弹性顶紧模块发生弹性形变,并在检测到抵接台被压迫至预定位置后停止电池模块与抵接台的相对移动。
41.可选地,上述的agv的电池拆卸方法中,所述电池模块沿竖直方向与位于其下方的抵接台的抵接面发生相对移动并接近的过程中中,电池模块向位于其下方的抵接台的抵接面移动。
42.可选地,上述的agv的电池拆卸方法中,所述在竖直方向上将电池模块与agv相互远离,使电池模块由agv的下方脱离agv的步骤具体为:
43.将agv沿竖直方向向上移动并远离抵接台,电池模块停留在抵接台上实现与agv的脱离。
44.可选地,上述的agv的电池拆卸方法中,所述在竖直方向上将电池模块与agv相互远离,使电池模块由agv的下方脱离agv的步骤包括:
45.在竖直方向上将抵接台与agv相互远离,并检测抵接台上是否存在电池模块;在检测到抵接台上已存在电池模块时,结束电池模块的拆卸过程;在检测到抵接台上不存在电池模块时进行下列步骤:
46.将电池模块沿竖直方向与位于其下方的抵接台的抵接面发生相对移动并重新抵接;
47.将拉钩勾住电池模块;
48.重新在竖直方向上将抵接台与agv相互远离。
49.可选地,上述的agv的电池拆卸方法中,所述通过解锁模块解锁agv的电池模块上的锁紧模块的步骤具体为:
50.锁紧模块在解锁模块的解锁顶杆由抵接面的下方向凸出于抵接面的方向移动的过程中被解锁。
51.本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:
52.本申请实施例公开的agv的电池拆装机构及电池拆卸方法能够快速、准确地拆卸电池模块。
附图说明
53.此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中:
54.图1为本申请实施例公开的换电站的整体结构视图。
55.图2为本申请实施例公开的电池更换装置的立体结构视图。
56.图3为本申请实施例公开的电池更换装置的正视结构视图。
57.图4为本申请实施例公开的agv的具体结构示图。
58.图5为本申请实施例公开的电池模块的具体结构视图。
59.图6为本申请实施例公开的电池模块的底部结构视图。
60.图7为本申请实施例公开的锁扣与锁紧模块以及解锁顶杆的配合剖面视图。
61.图8为本申请实施例公开的提升架与主车架、副车架的配合结构视图。
62.图9为本申请实施例公开的提升架具体结构视图。
63.图10为本申请实施例公开的支撑台及定位机构的俯视结构视图。
64.图11为本申请实施例公开的第一定位模块的具体结构视图。
65.图12为本申请实施例公开的第二定位模块的具体结构视图。
66.图13为本申请实施例公开的电池拆装机构及斜坡的具体结构视图。
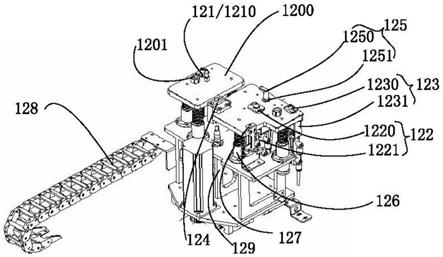
67.图14为本申请实施例公开的电池拆装机构的具体结构视图。
68.图15为本申请实施例公开的电池仓系统的整体结构视图。
69.图16为本申请实施例公开的电池取放装置的具体结构视图。
70.图17为本申请实施例公开的电池取放装置的俯视结构视图。
71.图18为本申请实施例公开的充电装置的具体结构视图。
72.图19为本申请实施例公开的充电座的具体结构视图。
73.图20为本申请实施例公开的消防装置的示意图。
74.图21为本申请实施例公开的电池模块承接机构以及检测器的配合结构视图;
75.图22为本申请实施例中公开的agv的电池更换方法的一种流程图。
76.附图标记说明:
77.1-电池更换装置、10-提升架、100-支撑台、1000-支撑面、1000a-容纳腔、1001-避让区域、1002-开口、101-定位机构、1010-第一定位模块、1010a-定位滑块、1010b-导轨、1010c-定位槽、1010d-引导斜面、1010e-复位弹性件、1010f-车轮检测传感器、1011-第二定位模块、1011a-水平推动组件、1011a1-固定支架、1011a2-移动支架、1011a3-水平推动动力单元、1011a4-推动导向单元、1011a5-柔性夹紧块、1012-基准标识、102-副车架下压机构、1020-下压动力单元、1021-下压件、103-副车架托举机构、104-主车架下压机构、1040-下压动力单元、1041-下压件、105-支撑框、1050-主体部、1051-延伸部、106-预充电机构、1060-预充电电连接件、1061-预充电动力单元、11-提升架升降机构、12-电池拆装机构、120-抵接台、1200-抵接面、1201-滚珠单元、121-粗定位模块、1210-粗定位柱、122-精定位模块、1220-精定位柱、1221-精定位动力单元、123-解锁模块、1230-解锁顶杆、1231-解锁动力单元、124-电池模块检测传感器、125-拉动模块、1250-拉钩、1251-拉钩动力单元、126-弹性顶紧模块、127-顶紧传感器、128-行走模块、129-基体、13-斜坡;
78.2-电池仓系统、20-电池取放装置、200-承载台、2000-电池模块固定件、2001-限位机构、2001a-限位件、2001b-限位动力单元、201-移载机构、2010-伸缩模块、2011-转动模块、202-电池升降机构、203-电池更换口、204-电池存放口、205-消防排废口、206-固定架、207-主支撑架、2070-升降通道、21-存放装置、210-充电座支架、211-充电座、2110-充电台、2110a-承接面、2111-充电座粗定位模块、2111a-充电座粗定位柱、2112-充电座精定位模块、2112a-充电座精定位柱、2113-接插件模块、2113a-接插件、2114-充电座滚珠单元、
2115-充电座电池模块检测传感器、2116-支撑架、2117-安装台、2118-一体式动力单元;
79.3-消防装置、30-电池模块承接机构、300-伸缩支撑模块、3000-固定部、3001-支撑部、3002-伸缩动力单元、3003-导轨、31-消防箱、32-消防材料盛放箱、320-出料口、33-出料阀、34-消防支架、35-检测器;
80.9-agv、90-主车架、91-副车架、910-锁扣、9100-解锁杠杆、9101-u形锁头、9102-锁体、92-销孔、93-电池模块、930-锁紧模块、931-定位孔;
81.a
--
第一水平方向、b-第二水平方向。
具体实施方式
82.为使本申请的目的、技术方案和优点更加清楚,下面将结合本申请具体实施例及相应的附图对本申请技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
83.以下结合附图,详细说明本申请各实施例提供的技术方案。
84.本申请实施例提供了一种适用于agv的换电站,图1示出的是本申请的换电站能够适用的一种两轮驱动的agv结构,本申请实施例均以该agv为例进行说明。但需要声明的是,本申请所述的agv9,并不仅限于图4所示的两轮驱动的agv,还可以是四轮驱动或仿生行走的agv,能够以自动导航的形式行走/停止并能够从agv9朝下一侧卸下/装载电池模块93即可。图4所示的agv9包括主车架90和副车架91,图4所示的实施例中,主车架90与副车架91沿agv9的行驶方向前后设置,也可以将副车架91设置为与agv9主车架90沿竖直方向固定相连并能与外部连接的结构,能够通过对主车架90及副车架91施加外力以改变agv9的主体的姿态即可。
85.本申请所述的电池模块93,安装于副车架91中,可以是镍氢充电电池,也可以是锂电池,还可以是不可充电电池,同时也并不仅限于图1所示的形状,能够配合本申请所述的换电站从agv9的副车架91朝下一侧卸下/装载即可。当然,在其它一些实施例中,也不排除电池模块93被安装于主车架90的情形,本实施例仅以安装于副车架91中为例进行介绍换电站的相关结构,本领域技术人员根据本实施例的介绍完全有能力组合出适合电池模块93被安装于主车架90甚至其它位置的agv所对应的类似换电站方案。
86.本实施例所述的换电站,如图1所示包括电池更换装置1和电池仓系统2,在图1所示的实施例中,电池更换装置1和电池仓系统2为配套使用,在具体实施过程中,电池更换装置1、电池仓系统2可以分别独立使用。
87.下面首先对电池更换装置1进行详细介绍。
88.本实施例的电池更换装置1用于将电池模块93从agv9中拆下/安装。
89.为能够从agv9朝下一侧更换电池,在本实施例中,电池更换装置1包括提升架10、提升架升降机构11以及电池拆装机构12,具体使用过程中,提升架10与提升架升降机构11可以如图3所示相互连接。提升架升降机构11可以设置为框架式,使提升架10在其内部进行抬升以及降低。
90.提升架10包括支撑台100,当agv9行驶至支撑台100上之后,提升架升降机构11能够将提升架10抬升,进而将agv9提升。电池拆装机构12能够在提升架10被抬升后处于提升
架10的下方,因此提升架升降机构11能够调整agv9的底部与电池拆装机构12之间的竖直间距,进而从底部拆装电池模块93,提升架升降机构11还可以设置为支撑提升架10的千斤顶等结构,能够根据需要升起及放下提升架10即可。通常情况下提升架10的支撑台100不能紧贴地面,因此可以在提升架10的前方设置一斜坡13,以方便agv9驶上支撑台100。
91.下面将对提升架10中各个部分进行分别描述,包括第一定位模块1010、第二定位模块1011、副车架下压机构102、副车架托举机构103以及主车架下压机构104等,在实际应用中,提升架10的各部分可以独立使用,也可以根据不同工艺需求任意组合使用,并不限于本实施例中所示的使用上述全部部分的技术方案,能够实现顺利将电池模块93从agv9中拆下即可。提升架10中各部分各自具有不同的功能,同时一些部分组合使用后也可能具备其他附加功能。下面将对提升架10的各部分进行分别说明。
92.首先,在对电池模块93进行拆卸或安装时,各设备的配合精度是极为重要的,如果配合精度太低,则各设备的相对位置会出现较大偏差,导致设备无法完成设定动作。
93.在本实施例中,为便于电池拆装机构12顺利拆装电池模块93,提升架10包括定位机构101。定位机构101能够定位agv9与提升架10、主要是agv9与支撑台100的相对姿态以及相对位置。具体而言,由于agv9可以直接停放在支撑台100上,因此agv9与支撑台100在竖直方向的位置可以不用考虑。如图9所示,定位机构101通常只需要考虑agv9在水平面内的停放位置。定位机构101可以通过定位agv9的车轮轴线垂直于车轮轴线的第一水平方向a的位置以及沿车轮轴线的第二水平方向b的位置的方式实现对agv9的定位。
94.为定位agv9垂直于车轮轴线的第一水平方向a的位置,如图9所示,定位机构101可以包括第一定位模块1010;而为定位agv9沿车轮轴线的第二水平方向b的位置,定位机构101可以包括第二定位模块1011,这样,通过第一定位模块1010与第二定位模块1011的定位作用,agv9在水平方向上的位置就可以固定,也就方便了电池拆装机构12定位和拆装电池模块93。
95.具体而言,在本实施例中,如图10所示,第一定位模块1010可以包括定位滑块1010a和导轨1010b,为定位agv9沿第一水平方向a的位置,滑块1010a上设置有沿第二水平方向b延伸的定位槽1010c,定位槽1010c可以如图11所示设置为的v字形,这样agv9的车轮可以自动卡在v字形的定位槽1010c内,当然,也可以考虑将定位槽1010c设置为恰好容纳agv9的车轮的矩形、倒梯形、半圆形或其它形状,当agv9的车轮经过定位槽1010c时能够向下沉入定位槽1010c并被其固定即可,这样,通过定位agv9的车轮,即实现了对agv9在第一水平方向a上的定位。
96.在支撑台100的上表面设置有支撑面1000,支撑面1000可以如图10所示设置为完整平面,也可以设置为网格状表面,能够支撑agv9并允许agv9在其上行驶即可。为使agv9的车轮能够顺利沉入定位槽1010c并被定位,在本实施例中,在支撑面1000上设置有自支撑面1000向下凹陷形成的容纳腔1000a,容纳腔1000a能够容纳第一定位模块1010,以使得第一定位模块1010的大部分结构能够相对于支撑面1000处于下方,这样定位槽1010c与支撑面1000可以基本持平,agv9的车轮由支撑面1000能够很容易地行驶至定位滑块1010a的定位槽1010c内。
97.定位滑块1010a上还设置有引导斜面1010d,如图11所示,引导斜面1010d的一侧与支撑面1000平齐,引导斜面1010d的另一侧与定位槽1010c的一侧平齐,这样agv9的车轮可
以容易地从支撑面1000被引导斜面1010d引导进入定位槽1010c内。
98.由于定位机构101需要对agv9在第一水平方向a以及第二水平方向b两个方向上进行定位,因此当agv9被第一定位模块1010定位在第一水平方向a的位置后,在通过第二定位模块1011定位在第二水平方向b的位置时需要调整agv9在该方向上的位置,在调整agv9位置时车轮也会沿该方向进行移动。
99.为了保证agv9在定位第二水平方向b的位置时保持第一水平方向a的位置,同时也为了降低agv9沿第二水平方向b移动的难度,如图10所示,本实施例中将定位槽1010c以及导轨均1010b沿第二水平方向b延伸,同时使定位滑块1010a与导轨滑动配合,以使定位滑块1010a能够沿第二水平方向b滑动。这样当agv9沿第二水平方向b移动时,定位滑块1010a可以在导轨1010b的引导下随agv9一起沿第二水平方向b移动,不但可以使agv9能够更加便捷的沿第二水平方向b移动,同时也可以确保agv9在第一水平方向a的位置不发生变化。
100.第一定位模块1010还可包括复位弹性件1010e,复位弹性件1010e与定位滑块1010a连接,调整复位弹性件1010e使其能够使定位滑块1010a稳定的保持在一复位位置。当定位滑块1010a沿第二水平方向由复位位置滑动至其它位置时,复位弹性件1010e将受到压缩、拉伸或其它弹性形变并储存弹性势能,而当外力消失后,复位弹性件1010e的弹性势能释放并能够使定位滑块1010a自行沿第二水平方向b恢复至复位位置。当第一辆agv9驶离提升架10后,定位滑块1010a可以自行恢复到初始位置以准备迎接下一辆agv9并为其定位。复位弹性件1010e可以是弹簧、弹片、高弹性的橡皮筋等,具备弹性并能够弹性推动定位滑块1010a至复位位置即可,在本实施例中,如图10所示,复位位置通常被设计在容纳腔1000a的中部,使定位滑块1010a距离容纳腔1000a两侧均留有一定间隙用以移动。在定位滑块1010a的两侧可以各设置一个复位弹性件1010e,以使定位滑块1010a的移动更加平稳。
101.第一定位模块1010还可包括车轮检测传感器1010f,车轮检测传感器1010f可以被设置在定位滑块1010a上,用于检测定位槽1010c内是否存在agv的车轮,车轮检测传感器1010f可以如图11所示嵌入定位滑块1010a朝上的一面,也可以凸出设置在定位滑块1010a的一侧;车轮检测传感器1010f可以设置为光电传感器,也可以设置为压力传感器等,能够感知agv9的车轮是否到达定位槽1010c即可,此处不再赘述。
102.通过如上设置,agv9可以自动行驶由支撑面1000使双轮驶入第一定位模块1010的定位滑块1010a上自动定位agv9的车轮以及agv9在第一水平方向a上的位置,此时车轮检测传感器1010f同步检测到车轮,通知中央处理器等中央控制机构agv9已经到达电池更换装置1。中央处理器向第二定位模块1011下达指令,继续定位agv9在第二水平方向b的位置。
103.在本实施例中,使用第二定位模块1011定位agv9在第二水平方向b上的位置,第二定位模块1011包括水平推动组件1011a。水平推动组件1011a沿第二水平方向b对称设置在支撑台100的两侧,并以沿第二水平方向b推挤agv9的方式定位其在第二水平方向b的位置。
104.如图9所示,当agv9在第一水平方向a上的位置被第一定位模块1010定位后,第二定位模块1011开始工作,水平推动组件1011a沿第二水平方向b伸出并抵接agv9的侧面,从上方看,相当于水平推动组件1011a夹住了agv9,这样agv9可以随着水平推动组件1011a的移动而移动,进而实现在第二水平方向b上的定位。
105.如图12所示,在本实施例中,水平推动组件1011a可以包括固定支架1011a1、移动支架1011a2、水平推动动力单元1011a3以及推动导向单元1011a4;
106.固定支架1011a1与支撑台100相固定,用于固定支撑水平推动组件1011a的其他机构,图12所示的实施例中,固定支架1011a1设置为板状,也可以设置为向上伸出的支撑柱,能起固定支撑作用即可;固定支架1011a1与移动支架1011a2通过推动导向单元1011d相连接,在图12所示的实施例中,推动导向单元1011a4可以设置为导轨,也可以设置为导向杆或导向柱,能够沿第二水平方向b导向移动支架1011a2即可,水平推动动力单元1011a3可以如图12所示设置为液压杆,也可以设置为机械臂、伺服电机等,能够沿第二水平方向b推动移动支架1011a2并推挤agv9至定位位置即可。由于移动支架1011a2为沿第二水平方向b移动,因此当一对移动支架1011a2伸出并同时推挤agv9时,能够使agv9的两侧实现均匀受力,避免agv9因受力不均而扭转。
107.为避免移动支架1011a2夹紧过程中伤害agv9的外表面,移动支架1011a2上设置有柔性夹紧块1011a5,柔性夹紧块1011a5可以如图12所示设置为凸出于移动支架1011a2朝向agv9的一面的小块,也可以设置为覆盖移动支架1011a2朝向agv9的一面,移动支架1011a2通过柔性夹紧块1011a5推挤agv9时能够减轻移动之间1011c与agv9之间的应力即可。
108.在本实施例中,第二定位模块1011的定位数据可以由能够观测到agv9与支撑台100在第二水平方向b上的相对位置的摄像头或其它类型的识别装置提供,在本实施例中,可以在支撑台100上设置一个基准标识1012,基准标识1012可以设置为支撑台100上的一个十字线标识、二维码等形式,并能够被agv9上的识别装置识别,当agv9识别基准标识1012时,可以计算出当前agv9在第二水平方向b上与基准标识1012之间的位置差,并通知中央处理器等中央控制装置,之后中央控制装置可以控制第二定位模块1011对agv9进行推挤,并使其移动至至正对基准标识1012,以完成agv9的主体在水平方向上的定位。
109.在完成agv9的主体的定位后,还需要对agv9进行固定,为下一步取下/安装电池模块93做好准备。
110.对于图4中所示的agv9而言,其主车架90与副车架91可能固定连接,也可能采用铰链活动连接。对于主车架90与副车架91采用铰链连接的结构而言,由于主车架90与副车架91之间可以发生相对转动而改变角度,一方面可能对定位精度造成负面影响,另一方面也可能在电池模块93的安装或拆卸过程中造成agv9的结构受力而发生改变,增加作业难度。
111.由于电池模块93设置在副车架91上,因此为了避免上述问题,本实施例中的提升架10还包括如图12所示的副车架下压机构102以及副车架托举机构103,此时,支撑台100、副车架下压机构102以及副车架托举机构103可以组成agv9的副车架固定总成。其中副车架下压机构102用于向下压迫agv9的副车架91,副车架托举机构103用于向上托举agv9的副车架91,通过在竖直方向上相反两侧同时对副车架91施力,至少可以将agv的副车架91固定牢固的固定住。
112.在本实施例中,如图12所示,副车架下压机构102可以被设置于一个水平推动组件上。需要说明的是,在一些实施例中,这里所说的水平推动组件可以是不同于第二定位模块1011内的水平推动组件1011a的其它独立的水平推动结构。并且,这些实施例中可以包含有定位机构101也可以不包含定位机构101,或者在包含定位机构101的实施例中,定位机构101可以包含第二定位模块1011或者不包含第二定位模块1011,又或者在包含第二定位模块1011的实施例中,第二定位模块1011也可以包含水平推动组件1011a或者不包含水平推动组件1011a。
113.当提升架10具备隶属于第二定位模块水平推动组件1011a时,为了简化结构,副车架下压机构102也可以被设置在水平推动组件1011a上。无论是独立的水平推动组件还是隶属于第二定位模块水平推动组件1011a,副车架下压机构102的位置均需要与agv9的副车架91相对应。本实施例中的副车架下压机构102的具体位置可随agv9的结构以及承压面的所在位置进行设计,针对不同的agv9,副车架下压机构102可能被设置在不同的位置,但无论副车架下压机构102被设置在何处,其均应保证当水平推动组件1011a在沿第二水平方向b推挤agv9时,均能够带动副车架下压机构102移动至副车架91的某一承压面上方。之后副车架下压机构102便可向下压迫该承压面。
114.当然,副车架下压机构102也可以被设置在能够使其移动至副车架91的承压面上方的其它结构上。
115.为使副车架91受到均匀的下压力,避免受力不均,副车架下压机构102可以沿第二水平方向b对称设置于的水平推动组件1011a上。
116.为进一步固定agv9,在本实施例中,提升架10还可包括主车架下压机构104,如图9所示,主车架下压机构104与所述副车架下压机构102沿第一水平方向a排布在水平推动组件1011a上,主车架下压机构104能够向下压迫agv9的主车架90,从而能够同时下压主车架90和副车架91,避免受力不均导致的agv9姿态不稳。
117.在本实施例中,为实现稳定下压,如图12所示,副车架下压机构102包括下压动力单元1020和下压件1021,下压件1021与下压动力单元1020连接,下压件1021沿所述第二水平方向延伸,如图12所示,下压件1021设置为沿第二方向延伸的柱销,agv9上对应设置有具备承压面的销孔92,下压件1021还可以设置为沿第二方向延伸的凸条,则agv9上对应设置有具备承压面的凹槽即可,下压件1021能够被水平推动组件1011a移动至agv9的承压面上方,即柱销伸入销孔92,此时下压动力单元1020推动下压件1021向下运动,则下压件1021向下压迫承压面,进而对agv9施加向下的压迫力。同样的,主车架下压机构104可包括下压动力单元1040和下压件1041,其结构以及工作原理与副车架下压机构102相同,在此不再赘述。
118.在本实施例中,副车架托举机构103可以单独或与支撑台100一起对agv9提供向上的托举力。尤其对于一些实施例而言,为使电池模块93能够顺利向下脱离agv9,会在支撑台100上开设有供电池模块93沿竖直方向通过的避让区域1001,避让区域1001可能是支撑台100上一个封闭的镂空区域,或者也可以是延伸至支撑台100的一侧并形成开口1002的缺口,图10所示的避让区域1001的形状与与图18所示的电池模块93在竖直方向的投影大致吻合,也可以设置为不吻合,能够允许电池模块93沿竖直方向通过即可。
119.由于该避让区域1001的存在,可能会使副车架91无法受到支撑台100的托举,此时设置副车架托举机构103来单独托举副车架91便显得更为重要。
120.为固定副车架托举机构103,提升架10可包括支撑框105,支撑框105与支撑台100固定连接,同时支撑框105也用于固定副车架托举机构103。支撑框105包括主体部1050以及延伸部1051,如图8所示,主体部1050与支撑台100固定连接,延伸部1051由主体部1050延伸至支撑台100的一侧,副车架托举机构103可以被固定在延伸部1051上,从而有更大的设置空间以及更好的托举位置。
121.当避让区域1001具备开口1002时,副车架托举机构103可以与开口1002相对,副车
架托举机构103在agv9处于支撑台100上的预定位置时,能够朝开口1002伸出并托举副车架91。
122.如图6所示,副车架托举机构103包括托举件1030以及托举动力单元1031;托举动力单元1031与延伸部1051固定连接,托举件1030通过托举动力单元1031的驱动移动至副车架91的下方,当需要托举副车架91时,托举件1030能够向上运动托举副车架91,在图9所示的实施例中,托举件1030设置为具备托举面并于副车架91的底面相吻合,也可以设置为具备凸出的顶接部,并通过抵接的方式托举副车架91。
123.通过上述的支撑台100、定位机构101、副车架下压机构102、副车架托举机构103及主车架下压机构104共同协作,可以实现agv9的定位以及固定。
124.由于agv9在电池模块93的更换过程中会有一段时间处于无电池模块93的状态,此时agv9可能会完全断电。然而,这种情况可能会对agv9的后续控制带来困扰。因此,为了时刻保持agv9处于开启状态,如图9所示,本实施例的提升架10还可包括预充电机构106,当agv9定位至预定位置后预充电机构106能够与设置于agv9上的预充电配合装置配合为agv9预充电,预充电机构106可以包括用于和预充电配合装置电连接的预充电电连接件1060,预充电电连接件1060可以是能够与预充电配合装置相互配合的充电线圈,也可以是能够与预充电配合装置相互电连接的插头或其它,能够电连接并为其充电的结构,此处不再赘述。除此之外,预充电机构106还包括气缸、转动架或其它形式的预充电动力单元1061,预充电动力单元1061可以被固定于延伸部1051或提升架10的其它部件上,预充电电连接件1060被预充电动力单元1061所驱动。当agv9定位至预定位置时其预充电配合装置刚好处于预充电电连接件1060的移动路径内,在需要对agv进行预充电时,预充电动力单元1061可以驱动预充电电连接件1060移动并与预充电配合装置电连接。当需要取消预充电状态时,只需反向驱动预充电动力单元1061便可使预充电电连接件1060脱离与预充电配合装置的电连接。
125.在agv9完成在提升架10中定位及固定后,可以通过中央处理器控制提升架10带动agv9进行升降,以调整agv9与电池拆装机构12的相对位置。
126.在本实施例中,电池模块93具备如图5所示的锁紧模块930,锁紧模块930可以为锁挂或其它结构,同时在副车架91上设置有锁扣910,锁扣910可以被设置为常见的快挂结构,如图7所示,包括解锁杠杆9100、u形锁头9101以及锁体9102,解锁杠杆9100以及u形锁头9101均与锁体9102转动连接。u形锁头9101处于自然状态时其开口朝下,当锁紧模块930向上伸入u形锁头9101的开口后,u形锁头9101能够在锁紧模块930的带动下转动至朝向水平方向并与解锁杠杆9100搭接固定,实现锁紧锁紧模块930。之后通过外力向上顶起解锁杠杆9100促使解锁杠杆9100转动,就能够使解锁杠杆9100与u形锁头9101的搭接固定结构崩溃,从而使u形锁头9101能够恢复自由转动,从而释放锁紧模块930。当然,锁紧模块930以及锁扣910也可以设置为其他能够自动锁紧并易于解锁的结构,例如设置解锁按钮。这些均为本领域的已知技术,在此不再赘述。
127.如图13及14所示,电池拆装机构12包括抵接台120、粗定位模块121、精定位模块122以及解锁模块123,如图6所示,电池模块93上设置有与粗定位模块121及精定位模块122对应的定位孔931。粗定位模块121、精定位模块122以及解锁模块123均设置在抵接台120上。
128.为承载电池模块93,如图14所示,抵接台120具有抵接面1200,本实施例中的粗定
位模块121可以包括粗定位柱1210,这些粗定位柱1210凸出于抵接面1200并与电池模块93上的一些定位孔931位置对应,本实施例中可以将这些与粗定位柱1210对应的定位孔931称为粗定位孔。本实施例中的精定位模块122包括精定位柱1220以及精定位动力单元1221。这些精定位柱1220与电池模块93上的另一些定位孔931位置对应,本实施例中可以将这些与精定位柱1220对应的定位孔931称为精定位孔,需要说明的是,本实施例中的粗定位孔以及精定位孔仅用于区分不同的对应关系,但对于二者的结构、形状、尺寸等方面没有任何限制,例如,粗定位孔与精定位孔的形状、构造可以完全相同,或者粗定位孔的孔径小于精定位孔的孔径等。并且,本实施例中的其它定位孔931均可采用相同或不同的结构、形状或者尺寸,没有限制。这些精定位柱1220平时缩回抵接面1200下方,并能够在精定位动力单元1221的驱动下凸出于抵接面1200。精定位动力单元1221可设置为液压顶杆,也可以设置为电动伸缩杆。
129.当agv9的电池模块93在提升架10的带动下与抵接面1200抵接时,粗定位柱1210能够首先伸入到与其对应的定位孔931内,从而实现电池拆装机构12与电池模块93的粗定位。相对于定位孔931的尺寸而言,粗定位柱1210要纤细的多,因此粗定位柱1210与定位孔931之间所形成的环隙宽度较大。其目的是使粗定位柱1210能够在双方位置相差较大时依然能够顺利伸入定位孔931内完成粗定位。
130.待粗定位柱1210伸入定位孔931后,再开启精定位动力单元1221将精定位柱1220伸出并伸入与其对应的定位孔931内。如图14所示,相比粗定位柱1210,精定位柱1220与定位孔931之间所形成的环隙宽度要小得多,可以基本填满定位孔931。因此精定位柱1220与定位孔931吻合度很高,当精定位柱1220顺利伸入定位孔931内时,便可实现电池模块93与电池拆装机构12的精确定位。
131.无论是粗定位还是精定位,电池模块93上的定位孔931与粗定位柱1210或精定位柱1220的位置均可能存在较大偏差,为了使粗定位柱1210以及精定位柱1220在与定位孔931存在一定偏差时依然能够顺利伸入并使电池模块93移动以实现定位功能,粗定位柱1210以及精定位柱1220的头部或者定位孔931的边缘可以设置导向面,导向面可以是斜面或弧面。
132.如上所述,在粗定位柱1210、精定位柱1220与定位孔931配合定位电池模块93的过程中,电池模块93会发生移动,此时如果抵接台120与电池模块93之间存在较大摩擦力则会影响电池模块93的移动效果甚至造成磨损。
133.为了避免上述问题,在本实施例中,如图14所示,抵接面1200的表面凸出设置有滚珠单元1201,当电池模块93放置于抵接台120上时,电池模块93可以在滚珠单元1201滚动配合从而避免摩擦过大。
134.通过粗定位柱1210、精定位柱1220及定位孔931的相互配合作用实现电池模块93相对于电池拆装机构12的精确定位后,就具备了使用解锁模块123解锁锁紧模块930的条件。本实施例中的解锁模块123具体可包括解锁动力单元1231以及与锁紧模块930的位置相对应的解锁顶杆1230,即每个锁紧模块930均有与其对应的解锁顶杆1230负责解锁,不会发生遗漏的情况。解锁顶杆1230能够在解锁动力单元1231的驱动下凸出于抵接面1200或者缩回至抵接面1200下方。
135.如前面介绍的,本实施例中所使用的锁扣910具备解锁杠杆9100,通过外力顶起解
锁杠杆9100就能够使锁扣910的开口转动并释放锁紧模块930,实现对锁紧模块930的解锁,因此在本实施例中,解锁顶杆1230实际上需要由下方对准与每个锁紧模块930配套锁紧的锁扣910上的解锁杠杆9100。
136.当解锁顶杆1230在解锁动力单元1231的驱动下凸出于抵接面1200时,解锁顶杆1230能够向上顶动解锁杠杆9100从而实现锁紧模块930的解锁。当所有的锁紧模块930全部被解锁后,电池模块93便可脱离副车架91。之后重新升起提升架10,agv9会随提升架10一起上升,而电池模块93便留在电池拆装机构12上。当然,在一些实施例中也可以使用其他能够使解锁杠杆9100被向上顶起的解锁结构,此处不再赘述。
137.为提高粗定位效率以及粗定位精度,如图14所示,本申请实施例的电池拆装机构12可以包括多个粗定位模块121,多个粗定位模块121优选沿电池模块93的一条对角线分布,距离越远定位精度越高。与此同时,为了提高精定位效率以及精定位精度,本申请实施例的电池拆装机构12也可以包括多个精定位模块122,多个精定位模块122优选沿电池模块93的另一条对角线分布,两种设置可以独立使用,也可以协同作用。
138.为提高自动控制效率,电池拆装机构12还可包括电池模块检测传感器124,电池模块检测传感器124设置在抵接台120上,用于检测抵接台120上是否存在电池模块93,本实施例所使用的电池模块检测传感器124为光电传感器,在其它实施例中也可以使用压力传感器等,能够判断电池模块93是否放置于电池拆装机构12的状态即可。
139.在拆卸电池模块93的过程中,有可能会发生电池模块93卡在副车架91中导致无法与副车架91分离的问题,因此在本实施例中,如图14所示,电池拆装机构12还可包括拉动模块125,拉动模块125包括拉钩1250以及拉钩动力单元1251,拉钩1250凸出于抵接面1200,并可在拉钩动力单元1251的带动下完成转动并勾住电池模块93的动作。在本实施例中,电池模块93的周边具备一圈可被勾住的凸出边缘,拉钩1250可以转动并勾住这些凸出边缘,从而在提升架10带动agv9重新上升时阻止电池模块93一同上升,从而使二者分离。
140.如图14所示,由于电池模块93的底面的面积较大,如果以塑料等不耐久的材料制备,在使用过程中容易发生变形,导致部分解锁顶杆1230即使伸出也无法解锁锁紧模块930。因此在本实施例中,对应每个锁紧模块930可以分别设置一个抵接台120以及一个解锁模块123,同时为适应电池模块93底面的形变,在每个抵接台120的底部均设置弹性顶紧模块126。
141.采用提升架10带动agv9下降至能够同时压迫所有的抵接台120的位置,此时弹性顶紧模块126能够将每一块抵接台120都顶起并紧贴电池模块93,从而使每个解锁顶杆1230均尽量靠近对应的锁紧模块930。这样可以有效避免由于电池模块93底部变形导致解锁顶杆1230无法解锁锁紧模块930的问题,在本实施例中,如图14所示,弹性顶紧模块126可以被设置为弹簧,也可以设置为弹性材料块等其他结构,具备弹性并能将抵接台120顶起即可。
142.为进一步确保各抵接台120能够被顶起并压迫至预定位置,本实施例所述的电池拆装机构12还包括顶紧传感器127,顶紧传感器127可以判定至少一个抵接台120是否被压迫至预定位置,如图14所示,顶紧传感器127可以设置为压力传感器,也可以设置为测距感应器,能够判断抵接台120所处的位置即可。
143.本实施例中的电池拆装机构12可以始终设置在提升架10的下方,例如将提升架10的初始位置设置在半空,或者在电池更换装置1的下方形成凹坑用以容纳电池拆装机构12。
但这两种方式中的前一种可能导致agv9难以进入提升架10,而后一种方式又可能导致电池模块93的输送困难。
144.因此,本实施例中将电池拆装机构12的初始位置设置在提升架10的侧部,当agv9与提升架10的相对位置被定位后,提升架10将升起并给予电池模块93拆装的空间,而为了使电池拆装机构12由侧部到达agv9朝下的一侧,此时的电池拆装机构12中还包括行走模块128,如图13所示,行走模块128可以被设置为履带、丝杠、轮组或其它动力结构,行走模块128能够带动抵接台120、粗定位模块121、精定位模块122、解锁模块123以及弹性顶紧模块126等在内的各模块自初始位置水平移动至电池模块93的下方。
145.在具体实施过程中,可以根据实际情况使用多个行走模块128并分别带动一部分抵接台120运动,如图13所示的实施例,可以将电池拆装机构12的其它模块分为两部分分别设置在提升架10的两侧,两部分模块分别使用两个行走模块128移动到电池模块93的下方。
146.在本实施例中可以为每个行走模块128配套一个基体129,该行走模块128所需要带动的这部分抵接台120、粗定位模块121、精定位模块122、解锁模块123以及弹性顶紧模块126等可以统一设置在该基体129上,这样行走模块128通过带动与其配套的基体129便可带动对应的一部分模块移动。
147.当拆卸电池模块93时,行走模块128带动抵接台120到达电池模块93的下方,然后抵接台120在弹性顶紧模块126及提升架10的配合作用下与电池模块93相互抵接,通过粗定位模块121及精定位模块122的定位作用,使得解锁模块123能够对准电池模块93上的锁紧模块930并完成解锁动作,此时提升架10被提升架升降机构11升起,电池模块93在自身重力及拉动模块125的配合作用下脱离副车架91,完成电池模块93拆卸。
148.当安装电池模块93时,电池模块93只需通过粗定位模块121的定位作用被定位到能够安装的位置,agv9随着提升架10的下降而靠近电池模块93,从而使锁紧模块930伸入伸入设置在副车架91的锁扣910的开口内并转动开口,自动锁紧,完成电池模块93的安装。
149.通过电池拆装机构12与提升架10、提升架升降机构11的配合作用,能够将电池模块93以一定的自动步骤从agv9上拆卸/安装,从而为agv9自动换电过程提供了支持基础。
150.接下来对电池仓系统2进行详细介绍。
151.在完成了电池模块93拆卸/安装步骤后,需要将耗尽电量的电池模块93转移至电池仓系统2进行储存,甚至电池仓系统2还可在储存电池模块93的同时还可对电池模块93进行充电,并将完成充电的电池模块93转移至电池拆装机构12以准备安装,为此,换电站还包括电池仓系统2。
152.为了能够移动、存储以及为电池模块93充电,如图15所示,电池仓系统2包括电池取放装置20以及的存放装置21,其中存放装置21仅具备存储电池模块93的功能而不具备充电功能,或者存放装置21可同时具备存储以及充电功能,本实施例将以后者为例进行说明。
153.电池取放装置20用于根据需要将电池模块93由电池拆装机构12或者存放装置21取出或放入,以及在电池拆装机构12以及存放装置21之间转移电池模块93,存放装置21内部设置有若干充电座211,用于存储电池模块93以及为电池模块93充电。若干充电座211可以设置在充电座支架210上。
154.在本实施例中,本实施例所述的电池取放装置20包括承载台200、移载机构201和电池升降机构202,承载台200可以如图15所示设置为平板状,也可以设置为电池夹等,能够
承载电池模块93并能够通过竖直方向的运动将电池模块93在承载台200与电池拆装机构12之间或者承载台200与充电座211之间进行转移即可。
155.移载机构201与承载台200连接,两者之间可以如图15所示直接固定连接,也可以是通过连接件相互连接,移载机构201能够带动承载台200将电池模块93移动至电池拆装机构12或存放装置21即可。移载机构201可以是在水平面内移动,也可以是更复杂的移动方式。
156.在本实施例中,移载机构201可以设置为如图16所示包括伸缩模块2010和转动模块2011,转动模块2011可以设置为如图16所示的转轴结构,也可以设置为圆环形轨道,能够带动承载台200水平转动并改变承载台200的水平朝向即可。伸缩模块2010可以设置为如图16所示的具备轨道的伸缩臂,也可以设置为液压控制的伸缩臂,能够在水平面内沿直线伸缩即可,这样,通过转动模块2011与伸缩模块2010的配合作用,通过转动及伸缩可以使放置于承载台200上的电池模块93的位置以及姿态改变,从而实现与电池拆装机构12或者充电座211的匹配,实现转移目的。
157.为了使承载台200能够完成竖直方向的移动并完成电池模块93在承载台200与电池拆装机构12之间或者承载台200与充电座211之间的转移操作,在本实施例中,使用电池升降机构202与移载机构201相连,电池升降机构202可以如图15所示设置为升降链条,移载机构201通过与升降链条固定连接以实现升降。也可以将电池升降机构202设置为沿竖直方向延伸的液压杆或其它具有升降功能的结构。
158.承载台200首先被电池升降机构202移动至低于电池模块93的位置,然后移载机构201控制承载台200水平移动至电池模块93的下方,此时承载台200可以略低于抵接台120,并与抵接台120分别对准电池模块93的不同区域。之后电池升降机构202向上升起承载台200,承载台200由下方托起电池模块93并直至电池模块93完全脱离电池拆装机构12,从而完成电池模块93由电池拆装机构12向承载台200的转移。
159.当需要将充满电的电池模块93由承载台200转移至电池拆装机构12上时,只需要进行反向操作,先将载有电池模块93的承载台200移动至高于电池拆装机构12的位置,并使抵接台120对准电池模块93,然后控制电池升降机构202向下移动直至电池模块93被电池拆装机构12的抵接台120托住并与承载台200完全脱离,完成电池模块93由承载台200至电池拆装机构12的转移过程。
160.为了便于连接电池升降机构202,在本实施例中可将移载机构201设置在固定架206上,再将电池升降机构202与固定架206连接。
161.为限制电池模块93在承载台200上的水平移动,避免转移电池模块93过程中意外掉落,在本实施例中,可以在承载台200上设置电池模块固定件2000,如图17所示,电池模块固定件2000可以设置为能够插入电池模块93的一些定位孔931的朝上的固定销,也可以为卡住电池模块93的卡板、卡爪等结构。本领域技术人员应当了解,由于电池模块93在由电池拆装机构12上被取下之前,与粗定位柱1210以及精定位柱1220对应的定位孔931将始终被占用,因此承载台200的固定销所对应的定位孔931应当不同于电池拆装机构12上的粗定位柱1210以及精定位柱1220所对应的定位孔931。
162.为限制电池模块93在承载台200上的相对竖直移动,避免转移电池模块93过程中因颠簸而产生跳动甚至脱离电池模块固定件2000而意外掉落,在本实施例中,在承载台200
还可以设置有限位机构2001,如图17所示,限位机构2001包括限制电池模块93向上移动并脱离电池模块93的限位件2001a及驱动限位件2001a的限位动力单元2001b。限位件2001a可以如图17所示设置为能够在限位动力单元2001b的驱动下移动至电池模块93上方并限制住电池模块93的限位杆、限位板等结构,能够阻止电池模块93沿竖直方向脱离承载台200即可,此处不再赘述。并且限位件2001a的移动方式可以为伸缩、转动、平移等各种方式。
163.在本实施例中,为允许电池模块93能够自电池取放装置20到达电池更换装置1及存储仓或者存放装置21,在电池取放装置20上需要具备电池更换口203以及至少一个电池存放口204,电池更换口203以及电池存放口204均能够供承载台200水平通过,电池更换装置1正对电池更换口203,存放装置21正对电池存放口204。
164.在图17中,为了简化设计便于制造,电池取放装置20可以包括主支撑架207,电池更换口203及电池存放口204均设置在主支撑架207上。与此同时,主支撑架207还具有升降通道2070,电池升降机构202设置在主支撑架207上,承载台200以及移载机构201均设置在升降通道2070内,并且能够在电池升降机构202的带动下沿升降通道2070竖直移动。
165.在本实施例中,电池存放口204与电池更换口203可以邻接设置,如图17所示,电池取放装置20的主支撑架207可以为长方体框架结构,在临近电池更换口203的两侧各设置一个电池存放口204,这样可以减少电池模块93的移动距离,节约在途时间。当然,在电池储存量较大时,本实施例中在相对电池更换口203的一侧也可以设置电池存放口204,虽然此处电池存放口204距离电池更换口203较远,但胜在可以充分利用电池取放装置20四周的空间。当电池取放装置20的主支撑架207采用其它结构,例如六棱柱结构时,电池存放口204甚至电池更换口203的数量可能更多。
166.并且,每个电池存放口204均可以沿竖直方向排布有多个充电座211,以节约占地面积。充电座支架210的结构可以根据电池更换口203的位置、充电座211的数量以及竖直方向的排布数量进行设计,并且,充电座支架210可以为一体式结构,也可以分为几个独立的结构,分别固定一部分充电座211。
167.如图19所示,充电座211可以包括充电台2110、充电座粗定位模块2111、充电座精定位模块2112以及接插件模块2113。充电座粗定位模块2111、充电座精定位模块2112均设置在充电台2110上。
168.为承载电池模块93,如图19所示,充电台2110具有承接面2110a,充电座粗定位模块2111包括充电座粗定位柱2111a,这些充电座粗定位柱2111a凸出于承接面2110a并与电池模块93上的一些定位孔931的位置相对应,本实施例中可以将这些与充电座粗定位柱2111a对应的定位孔931称为充电座粗定位孔。本实施例中的充电座精定位模块2112包括充电座精定位柱2112a以及充电座精定位动力单元。这些充电座精定位柱2112a与电池模块93上的另一些定位孔931位置对应,本实施例中可以将这些与充电座精定位柱2112a对应的定位孔931称为充电座精定位孔,需要说明的是,与粗定位孔以及精定位孔一样,本实施例中的充电座粗定位孔以及充电座精定位孔也仅用于区分不同的对应关系,但对于二者的结构、形状、尺寸等方面没有任何限制。充电座精定位柱2112a能够在充电座精定位动力单元的驱动下伸入这些定位孔931。充电座精定位动力单元可设置为液压顶杆,也可以设置为电动伸缩杆等结构。
169.本领域技术人员也应当了解,由于电池模块93在由承载台200上被取下之前,与承
载台200的固定销所对应的定位孔931将始终被占用,因此充电座粗定位柱2111a以及充电座精定位柱2112a所对应的定位孔931应当不同于承载台200的固定销所对应的定位孔931。并且,座粗定位柱2111a以及充电座精定位柱2112a所对应的定位孔931可以与粗定位柱1210以及精定位柱1220所对应的定位孔931可以完全相同、部分相同或完全不同。
170.当电池模块93被承载台200转移至充电台2110上时,充电座粗定位柱2111a能够首先伸入到与其对应的定位孔931内,从而实现充电座211与电池模块93的粗定位。相对于定位孔931的尺寸而言,充电座粗定位柱2111a要纤细的多,因此充电座粗定位柱2111a与定位孔931之间所形成的环隙宽度较大。其目的是使充电座粗定位柱2111a能够在双方位置相差较大时依然能够顺利伸入定位孔931内完成粗定位。
171.待充电座粗定位柱2111a伸入定位孔931后,再开启充电座精定位动力单元将充电座精定位柱2112a伸入与其对应的定位孔931内。相比充电座粗定位柱2111a,充电座精定位柱2112a与定位孔931之间所形成的环隙宽度要小得多,可以基本填满定位孔931。因此充电座精定位柱2112a与定位孔931吻合度很高,当充电座精定位柱2112a顺利伸入定位孔931内时,便可实现电池模块93与充电座211的精确定位。
172.同样的,无论是粗定位还是精定位,电池模块93上的定位孔931与充电座粗定位柱2111a或充电座精定位柱2112a的位置均可能存在较大偏差,为了使充电座粗定位柱2111a以及充电座精定位柱2112a在与定位孔931存在一定偏差时依然能够顺利伸入并使电池模块93移动以实现定位功能,充电座粗定位柱2111a以及充电座精定位柱2112a的头部或者定位孔931的边缘可以设置导向面,导向面可以是斜面或弧面。
173.如上所述,在充电座粗定位柱2111a、充电座精定位柱2112a与定位孔931配合定位电池模块93的过程中,电池模块93会发生移动,此时如果充电台2110与电池模块93之间存在较大摩擦力则会影响电池模块93的移动效果甚至造成磨损。
174.为了避免上述问题,在本实施例中,如图19所示,承接面2110a的表面凸出设置有充电座滚珠单元2114,当电池模块93放置于充电台2110上时,电池模块93可以在充电座滚珠单元2114滚动配合从而避免摩擦过大。
175.为提高粗定位效率以及粗定位精度,如图19所示,本申请实施例的充电座211可以包括多个充电座粗定位模块2111,多个充电座粗定位模块2111优选沿电池模块93的一条对角线分布,距离越远定位精度越高。与此同时,为了提高精定位效率以及精定位精度,本申请实施例的充电座211也可以包括多个精定位模块122,多个充电座粗定位模块2111沿电池模块93的另一条对角线分布,两种设置可以独立使用,也可以协同作用。
176.通过充电座粗定位柱2111a、充电座精定位柱2112a及定位孔931的相互配合作用实现电池模块93相对于充电座211的精确定位后,就具备了使用接插件模块2113与电池模块93电导通并为其进行充电的条件。
177.为完成接插件模块2113与电池模块93的电导通操作,在本实施例中,接插件模块2113可以具备接插件2113a和接插件动力单元,接插件动力单元可以被设置为伸缩杆,也可以设置为机械臂等其他动力机构,能够带动接插件2113a与电池模块93上的对应电插口完成电导通操作即可。在实际应用中,接插件2113a的形状与电池模块93上的电插口对应设置,如一者为插座,另一者为插头等,此处不再赘述。
178.为提高自动化效率,在本实施例中,充电台2110上还设置了充电座电池模块检测
传感器2115,充电座电池模块检测传感器2115用于检测电池模块93是否已经放置在充电台2110上,本实施例中所使用的充电座电池模块检测传感器2115可以为微动开关,当电池模块93放置在充电台2110上时,触动微动开关,即可开始进行精定位及电导通操作。当然,充电座电池模块检测传感器2115也可以设置为光电传感器等其他感应开关,能够判断电池模块93是否已经放置在充电台上即可。
179.为了便于电池模块93在承载台200与充电座211之间进行转移,在本实施例中,充电台2110可以设置为如图19所示的u形结构,而充电座精定位柱2112a以及接插件2113a均位于充电台2110的上方且正对u形结构的中空区域。此时充电座精定位柱2112a的凸出方向与充电座粗定位柱2111a的凸出方向相反,即向下凸出。充电座精定位动力单元驱动充电座精定位柱2112a沿竖直方向移动。
180.这样在充电台2110与充电座精定位柱2112a以及接插件2113a之间便可以形成一定间隙。当要将电量耗尽的电池模块93由承载台200转移至充电座211时,承载台200可以在移载机构201的带动下将电池模块93由上述间隙伸入并将电池模块93置于充电台2110与充电座精定位柱2112a以及接插件2113a之间,之后通过电池升降机构202降低高度,使电池模块93被充电台2110托住,同时承载台200则可由u形结构的中空区域通过,完成电池模块93与充电座211之间的转移。需要说明的是,本实施例中的充电台2110也可以采用其它能够供承载台200由下方通过的结构,在此不再赘述。
181.在电池模块93完成转移的同时也会同步完成粗定位,之后充电座精定位模块2112的充电座精定位动力单元驱动充电座精定位柱2112a下降并伸入对应的定位孔931内完成精定位。最后接插件动力单元再带动接插件2113a与电池模块93电导通。
182.同样的,当需要由充电座211上将充满电的电池模块93取出时,只需要反向操作,先将充电座精定位柱2112a以及接插件2113a脱离与电池模块93的配合状态,之后将承载台200移动至电池模块93下方再向上升起,承载台200在升起过程中便可将电池模块93托起并直至脱离与充电台2110以及充电座粗定位模块2111的配合,完成取出过程。
183.在本实施例中,接插件2113a的朝向可以与充电座精定位柱2112a的凸出方向相同,也可以与充电座精定位柱2112a的凸出方向不同。当充电座精定位柱2112a的凸出方向与充电座粗定位柱2111a相反,即向下凸出,且接插件2113a的朝向可以与充电座精定位柱2112a的凸出方向相同时,接插件动力单元可以驱动接插件2113a也沿竖直方向移动,即此时接插件2113a与充电座精定位柱2112a的移动方向相同。
184.本实施例中为了固定充电座精定位模块2112以及接插件模块2113,充电座211上还可包括支撑架2116,支撑架2116由u形结构的底部向上伸出,充电座精定位模块2112以及接插件模块2113均可设置在支撑架2116上。
185.而由前述分析可知,在不同的操作过程中,接插件2113a与充电座精定位柱2112a的移动方向也均相同,因此为了节省空间以及提高效率,在本实施例中,可以使用安装台2117同时固定充电座精定位柱2112a以及接插件2113a,同时将充电座精定位动力单元以及接插件动力单元一体化设置为一体式动力单元2118,如图19所示,一体式动力单元2118固定设置在支撑架2116上,安装台2117则能够在一体式动力单元2117a的驱动下沿竖直方向移动,从而使充电座精定位柱2112a以及接插件2113a一起移动,同步完成精定位以及电导通操作。
186.电池模块93在充电过程中可能会由于电流过载、过热等问题发生起火甚至爆炸。此时如果不及时抑制火势,可能会蔓延至其它电池模块,造成严重的后果。因此,一旦发生上述问题,需要能够尽快将事故电池模块93远离其它电池模块93并进行消防处理。
187.因此,在本实施例中,如图20所示,换电站还可包括消防装置3,电池取放装置20还具备消防排废口205,消防装置3与消防排废口205正对。在本实施例中,如图20所示,消防排废口205可以与电池更换口203相对设置,此时电池更换装置1、电池仓系统2以及消防装置3可以依次排布。
188.在本实施例中,消防装置3包括电池模块承接机构30、消防箱31、消防材料盛放箱32以及出料阀33。其中,电池模块承接机构30用于承接需要消防的电池模块93,并能够将电池模块93输送至消防箱31内。消防材料盛放箱32用于盛放消防材料,例如沙子。并且消防材料盛放箱32具有出料口320,出料口320需要正对消防箱31,出料阀33设置在出料口320上。当需要对消防箱31内的电池模块93进行消防灭火操作时,打开出料阀33,使存放在消防材料盛放箱32内的消防材料进入到消防箱31内,进而实现消防。在本实施例中,还可具备如图20所示的消防支架34,上述各设备均可固定在消防支架34上。
189.在本实施例中,消防箱31可以设置在电池模块承接机构30的下方,此时电池模块承接机构30可以通过掉落的方式将电池模块93输送至消防箱31。如图20所示,当电池模块93放置于电池模块承接机构30上时,电池模块承接机构30可以按照预设步骤撤去承接力,从而使电池模块93掉落。
190.本实施例中,电池模块93可以通过电池取放装置20被转移至电池模块承接机构30,转移的原理与电池模块93由承载台200转移至充电座211相同,均是通过竖直方向的移动实现,在此不再赘述。
191.在本实施例中,如图21所示,电池模块承接机构30可以具备两个伸缩支撑模块300。通常情况下,伸缩支撑模块300处于伸出姿态时才能够托住电池模块93,而当伸缩支撑模块300处于缩回姿态时电池模块93则会掉落。通常情况下,两个伸缩支撑模块300的伸出方向相对便可实现上述方案。而对于一些中部存在较大镂空区域的电池模块而言,可能伸缩支撑模块300的伸出方向相互背离也可以实现上述方案。
192.如图21所示,伸缩支撑模块300可以包括固定部3000、支撑部3001以及伸缩动力单元3002,伸缩支撑模块300可以通过固定部3000固定在消防支架34或其它部件上。同时伸缩动力单元3002固定在固定部3000上。伸缩动力单元3002用于驱动支撑部3001以完成伸缩动作,伸缩动力单元3002可以设置为伸缩臂,也可以设置为伸缩杆,能够实现沿水平方向具备伸出/缩回两种状态即可。
193.为了使支撑部3001可以平稳地伸出和缩回,伸缩支撑模块300还可设置有伸缩导轨3003,支撑部3001与固定部3000通过伸缩导轨3003连接,支撑部3001在伸缩过程中能够被伸缩导轨3003导向。
194.除了上述采用伸缩支撑模块300的方式外,电池模块承接机构30也可以设置为耐火传送带等形式,能够承接电池模块93并将电池模块93输送至消防箱31即可。
195.本实施例中的消防材料盛放箱32、出料阀33、电池模块承接机构30及消防箱31可以自上而下依次设置,这样无论是电池模块93向消防箱31的转移还是消防材料向消防箱31的转移均可通过重力实现,无需设置其他动力。
196.为检测了提升消防装置的自动化程度,在本实施例中的消防装置3还可包括检测器35,检测器35可以检测电池模块承接机构30是否承接有电池模块93。检测器35可以是热感感应器,也可以是微动开关等其它类型,能够检测出电池模块承接机构30上是否有电池模块93即可。
197.当检测器35检测到电池模块承接机构30上承接了电池模块93后,可以向中央处理器发出检测信号,中央处理器收到信号后可向电池模块承接机构30发出指令,控制电池模块承接机构30将电池模块93转移至消防箱31内。之后再控制出料阀33开启,释放消防材料盛放箱32内的消防材料,将处于消防箱31内的电池模块93的险情遏制,至此完成消防操作。
198.综上所述,本申请实施例所提供的适用于agv的换电站具有节约换电时间、提升agv工作效率、换店速度快、精度高、自动化程度高等诸多优点。
199.本申请的另一实施例还提供了一种agv的电池更换方法,该方法可以由上述agv的换电站实施,也可以由其它设备实施。
200.具体地,如图22所示,该agv的电池更换方法包括下列步骤:
201.s10、将电池拆装机构置于agv的下方;
202.s20、将agv上的旧电池模块与电池拆装机构对接并与agv解除连接关系;
203.s30、将旧电池模块脱离agv的电池模块装配区域;
204.s40、将旧电池模块由电池拆装机构上取下并将新电池模块与电池拆装机构对接;
205.s50、将新电池模块与agv发生相对移动并靠近,使新电池模块置于电池模块装配区域并与agv建立连接关系。
206.通过上述五个步骤便可将agv上原有的缺电状态的电池模块取下,并将新的满电状态的电池模块更换到agv中,从而完成电池模块的整个更换过程。相较于等待充电的方式,这种更换电池的方法能够节省大量时间。需要说明的是,上述s10至s50中,除某一步骤的实施需要依赖于另一步骤的结果之外的情况外,其它一些步骤可能并没有严格的先后顺序(例如s10与s20),根据所采用的设备的结构以及控制程序的不同,这些步骤中的任意两个甚至更多个可能同时执行,或者在一个步骤进行到某一阶段时另一步骤开始执行,并且后执行的步骤也可能先于先执行的步骤结束。只要最终将五个步骤全部执行完毕,以使agv的电池模块获得更新即可。
207.下面,对每个步骤进行分别说明。
208.s10是更换agv上电池模块的准备步骤,其中所述的电池拆装机构可以为上述换电站内的电池拆装机构12,或者为用于拆装电池的其它机构。
209.如果电池拆装机构初始时便已经处于agv的承载设备(例如上述换电站中的提升架10)的下方,则此时只需要将agv通过自行移动或其它设备辅助移动等方式移动至承载设备上便可自然实现该步骤。
210.而如果电池拆装机构初始时并未处于agv的承载设备下方,而是处于该承载设备的两侧,那么在将agv移动至承载设备之后只是使agv处于了初始位置,之后还需要将agv由初始位置向上抬升一定高度,以能够使电池拆装机构水平移动至agv的下方。在将agv抬升后,还要将电池拆装机构水平移动至agv的下方。在对于上述换电站而言,agv的抬升过程可以通过提升架升降机构11带动提升架10实现,电池拆装机构12自身也设置有相应的行走模块128用以水平移动。电池拆装机构水平移动的过程可以在agv停止太生之后开始,可以在
agv开始抬升一段时间后开始,或者与agv的抬升过程同时开始。并且,电池拆装机构水平移动的过程可以在agv停止之前或之后结束,或者两个过程同时结束。
211.由于agv通常需要由其它位置移动至电池拆装机构的上方,并且对于上述换电站或其它类似的设备而言,agv还需要由提升架10带动上下移动,因此agv整体的水平位置对于s20的顺利进行也是有一定影响的。而提升agv整体的位置确定性也有助于提高s20的成功率,因此在进行s10的过程中,可以同步对agv的水平位置进行定位。
212.在本实施例中,对agv的水平位置进行定位也可以被分为两个阶段。第一个阶段中,通过定位agv的车轮实现对agv垂直于车轮轴线的第一水平方向a的位置的定位。在第二个阶段是对agv沿车轮轴线的第二水平方向b的位置的定位,并且为了避免第一阶段的定位失效,在agv在沿第二水平方向b的定位过程中需要始终保持agv在第一水平方向a上的位置不变。通过上述两个阶段,便可实现agv整体的水平位置的定位。
213.对于第一阶段,可以采用定位槽对agv进行定位,其具体过程可以为:将agv的车轮沿第二水平方向b滚入一沿第二水平方向b延伸的定位槽内,在重力作用下使车轮卡在定位槽内,以定位agv在第一水平方向a的位置。定位槽的相关结构可以参考上述实施例中的换电站。
214.在执行第二阶段时,agv可以在沿第二水平方向b移动的过程中将车轮始终卡在定位槽内,从而保持agv在第一水平方向的位置。由于定位槽沿第二水平方向b延伸,因此即使定位槽在沿第二水平方向b移动的过程中会相对于定位槽移动,也可以保证定位槽始终能够约束车轮以及agv整体在第一水平方向的位置。
215.在更为优选的方案中,agv在沿第二水平方向b移动的过程中可以使车轮通过摩擦力带动定位槽一起沿第二水平方向b移动。这样在执行第二阶段时可以使定位槽与车轮保持相对静止,因此可以获得更高的定位精度。上述方案可以采用上述实施例中的换电站实施,或者也可以采用不同于换电站中所描述的相应结构的其它结构或设备实施。
216.为了提升自动化效率以及定位精度,在进行第一阶段的过程中可以同步检测agv的状态,在检测到agv已经完成在第一水平方向a的位置的定位时,再开始对agv沿车轮轴线的第二水平方向b的位置的定位。判断agv已经完成在第一水平方向a的位置的定位的方法很多,例如检测agv上某一标志物的位置是否处于限定范围内,处于限定范围则认为已经完成第一水平方向的定位,又或者检测agv处于静止状态的时间是否超过限定阈值,当超过限定阈值时认为已经完成第一水平方向的定位等等。
217.而本实施例结合定位槽定位的特点,提供了一种较为简单的判断方式,即检测定位槽内是否存在agv的车轮。当检测到定位槽内存在车轮时,便可认为第一水平方向的定位已经完成。相关的实施结构已经在上述实施例中的换电站中阐明,可以在定位机构101的第一定位模块1010内设置车轮检测传感器1010f,在此不再赘述。
218.本实施例在进行第二阶段时,可以根据所获取的agv在第二方向上与基准标识的位置差对agv沿车轮轴线的第二水平方向b的位置进行定位。该基准标识可以为刻痕、二维码、某一指定结构的轮廓等各种形式,本实施例中不做限定。
219.并且,在沿第二水平方向b定位agv时,免不了要对agv施加沿第二水平方向b的作用力以使其移动。如果仅从一侧对agv施加作用力,则当停止施加作用力时,agv有可能在惯性的作用下继续向前移动一段距离,从而导致定位精度降低。为了避免这一问题,本实施例
在进行agv的第二水平方向b的位置的定位过程中可以沿第二水平方向b同时向agv的两侧施力,使agv在被夹紧的状态下被推挤至定位位置。通过这种方法可以有效控制agv因惯性而移动的距离,从而提高定位精度。在上述换电站的实施例中可通过第二定位模块1011的水平推动组件1011a实现上述功能,相关结构及原理已在该实施例中进行详细说明,在此不再赘述。
220.s20的目的是将agv上的旧电池模块与agv的主体部分解除连接关系。在s10中,agv整体与电池拆装机构12之间通常并未直接接触,而是存在一定的间距,因此在此步骤中,如果想要电池拆装机构对旧电池模块进行操作,则需要将旧电池模块与电池拆装机构进行对接。
221.此时有几种容易想到的对接方式,其中之一是将电池拆装机构向上移动,使其靠近agv,并最终实现二者对接。另一种方式则相反,是将agv整体向下移动至与电池拆装机构对接的位置。除此之外,可以使二者同时相向移动,甚至可以是二者以不同的速率同向移动并接近,最终实现对接。对于上述实施例中的换电站而言,其所采用的是第二种方式,即利用电池更换装置1内的提升架升降机构11将提升架10以及agv整体向下移动,并与电池拆装机构12对接。
222.对于电池拆装机构而言,如果想要顺利、快速地接触旧电池模块与agv的连接关系,通常需要二者保持较高的定位精度。因此,在将旧电池模块与电池拆装机构对接的过程中,还可以对旧电池模块的水平位置进行定位。该定位过程可以在对接开始前、进行中甚至完成后开始,并且可以在对接完成前、完成时或者完成之后完成。对于上述的换电站而言,其定位过程通常可被安排在对接过程进行的过程中开始,并且在对接完成后才结束。
223.具体地,本实施例中对电池模块的水平位置进行定位的过程可以分为两个阶段,第一个阶段是对agv的电池模块进行水平方向的粗定位,即精度较低误差较大的定位。第二个阶段则是对agv的电池模块进行水平方向的精定位,即精度较高、误差较小的定位。
224.对于第一个阶段,本实施例可以采用将粗定位柱由下方伸入电池模块的粗定位孔的方式来对agv的电池模块进行水平方向的粗定位。同时对于第二个阶段,本实施例可以采用将精定位柱由下方伸入电池模块的精定位孔,对agv的电池模块进行水平方向的精定位。并且,精定位柱与精定位孔所形成的环隙宽度小于所述粗定位柱与粗定位孔所形成的环隙宽度。即利用环隙的大小作为精度高低的依据,环隙越大,精度越低,反之环隙越小,精度就越高。
225.结合上述换电站的电池拆装机构12的结构来看,粗定位柱1210由下方伸入电池模块的粗定位孔过程可以在电池模块93向位于其下方的电池拆装机构12的抵接台120的抵接面1200移动的过程中同步完成,且电池模块93完成水平方向的粗定位时与抵接面1200处于抵接状态。
226.而将精定位柱1220由下方伸入电池模块93的精定位孔的过程具体可以采用将精定位柱1220由抵接面1200的下方向凸出于抵接面1200的方向移动并伸入电池模块93的精定位孔,对agv的电池模块进行水平方向的精定位。具体的定位部件结构以及相关定位原理均已在上述换电站的实施例中阐明,在此不再赘述。
227.待电池模块的水平定位已经完成或者基本完成时,电池拆装机构便可开始解除电池模块与agv的连接关系。在电池模块与agv的主体之间会设置诸如上述换电站的实施例所
说的锁紧模块930与agv的副车架91的锁扣910形成连接关系。因此,解除电池模块与agv的连接关系实际上就是解除锁紧模块930与锁扣910之间的连接关系以解锁锁紧模块930。对于本实施例所提供的agv而言,可通过解锁模块解锁agv的电池模块,解锁模块的结构可以参见上述换电站的相关介绍,该解锁模块123具备解锁顶杆1230,锁紧模块930可在解锁模块123的解锁顶杆1230由抵接面1200的下方向凸出于抵接面1200的方向移动的过程中被解锁。相关解锁结构及原理在上述换电站的实施例中已详细阐明,在此不再赘述。
228.对于一个电池模块93而言,可能需要在不同方位设置多个锁紧模块930。由于电池模块93的底面的面积较大,如果以塑料等不耐久的材料制备,在使用过程中容易发生变形,变形后的底面可能导致锁紧模块930与解锁顶杆1230之间的相对位置可能发生变化,从而致使部分解锁顶杆1230即使伸出也无法解锁锁紧模块930。
229.为了避免或改善上述问题,本实施例在电池模块93沿竖直方向与位于其下方的抵接台120的抵接面1200发生相对移动并接近的过程中,电池模块93会将抵接台120向下压迫并使与抵接台120连接的弹性顶紧模块126发生弹性形变。这一过程将会在检测到抵接台120被压迫至预定位置后停止,即停止电池模块93与抵接台120的相对移动。通过这种弹性压迫能够使抵接面1200与电池模块93的底面紧密贴合,从而确保锁紧模块930与解锁顶杆1230之间的相对位置精度。
230.虽然s20使得旧电池模块与agv的连接关系得以解除,但由于此时旧电池模块仍然处于agv的电池模块装配区域(例如副车架91)内,因此受限于双方的空间位置,很难直接转移旧电池模块,因此还需要执行s30,将旧电池模块脱离agv的电池模块装配区域。
231.s30的执行过程中,由于在s20中已经将旧电池模块与下方的电池拆装机构对接,因此通常将电池拆装机构相对于agv的主体的承载设备进行竖直方向的相互远离,由于旧电池模块与电池拆装机构对接,二者可保持相对静止,而agv被承载设备承载,二者保持相对静止,因此可实现旧电池模块与agv的电池模块装配区域的脱离。同样的,agv与旧电池模块的脱离可以是其中一者不动,另一者沿竖直方向远离,或者二者同时朝相互背离的方向移动,甚至二者以不同速率做同向移动并相互远离。对于上述换电站而言,其通常利用提升架升降机构11与提升架10的配合将agv向上移动至旧电池模块脱离agv的电池模块装配区域。
232.在一些agv的拆卸过程中,可能由于agv本身与电池模块的尺寸精度问题,即使二者已经解除了锁紧模块的锁紧关系,但可能在其它本不应该形成固定结构的位置可能由于过盈、挤压等方式形成暂时的固定结构。而由于这些固定结构的存在,即使在竖直方向上使电池拆装机构及其承载台与agv的承载设备以及agv整体相互远离,但电池模块仍可能与agv固定在一起,而没有分离。
233.此时为了通过自动化设备进行补救,在s30中可包括下列步骤:
234.在竖直方向上将抵接台与agv相互远离,并检测抵接台上是否存在电池模块;在检测到抵接台上已存在电池模块时,结束s30;在检测到抵接台上不存在电池模块时进行下列步骤:
235.将电池模块沿竖直方向与位于其下方的抵接台的抵接面发生相对移动并重新抵接;
236.将拉钩勾住电池模块;
237.重新在竖直方向上将抵接台与agv相互远离。
238.在再次相互远离的过程中,由于电池模块已经被拉钩勾住而无法跟随agv一起移动,因此在相互远离过程中前述的临时固定结构将会被破坏,从而使电池模块与agv顺利脱离。在上述的换电站的实施例中,检测抵接台120上是否存在电池模块93的过程可以通过电池模块检测传感器124实现。拉钩1250被设置在电池拆装机构12中,但在其它设备中,拉钩也可能被设置在其它不随agv一起移动的结构或设备上。
239.待agv处于能够被顺利转移或输送的状态后,便可开始执行s40,将旧电池模块由电池拆装机构上取下并将新电池模块与电池拆装机构对接。该过程可通过人工完成,也可以采用上述换电站完成。待新电池模块与电池拆装机构对接完成后,便可执行s50,使新电池模块置于电池模块装配区域并与agv建立连接关系,完成电池更换的全部过程。
240.为了提高自动化效率,可以在s40执行的过程中检测抵接台上是否重新存在电池模块,待检测到抵接台上重新存在电池模块时,再执行s50。判断抵接台上是否重新存在电池模块的方式有许多种,例如采用计数器或计数软件配合电池模块检测传感器124等。
241.由于在s30中电池拆装机构与agv之间会存在较远的距离,因此在s40中将新电池模块对接在电池拆装机构上之后,新的电池模块与agv之间依然会存在较远的距离,而无法直接装配。因此,在s50中需要将新电池模块与agv发生相对移动并靠近,缩短二者之间的距离使新电池模块置于电池模块装配区域。这一靠近过程可以通过将agv整体向下移动的方式实现,随着agv的向下移动,新电池模块便可逐渐进入agv的电池模块装配区域内。而使新电池模块与agv建立连接关系的方式可以通过所设置的机构使锁紧模块重新被锁紧,该机构的样式以及锁紧原理根据锁紧模块及其配合结构的不同而对应调整。
242.例如,如果锁紧模块被解锁/锁紧的操作动作完全相同,则可以通过解锁模块123同时作为解锁与锁紧机构。解锁顶杆1230第一次伸出使锁紧模块被解锁,电池模块与agv的连接关系解除,解锁顶杆1230第二次伸出使锁紧模块被重新锁紧,电池模块与agv的连接关系建立。又例如,如果锁紧模块被解锁/锁紧的操作动作完全相反,则可以通过设置与解锁模块123的控制动作相反的机构实施锁紧动作。而对于上述实施例所提供的锁紧模块930与锁扣910的配合结构而言,还存在一种更为快捷的锁紧方法,即可在电池模块93向电池模块装配区域内移动的同时自行实现锁紧模块930与锁扣910的锁紧,无需其它多余步骤。
243.由于agv的各系统在工作状态下可能需要时刻接收、发送、储存以及调阅多指令或其它信息,而agv一旦断电,这些功能便都将失去,甚至连储存在其内部的信息也可能丢失。因此agv的各系统通常需要随时保持通电状态,即便在更换电池时也是如此。在正常情况下,agv的电能由其上的电池模块提供,而在上述s20至s50这四个步骤中,尤其是旧电池模块即将与agv解除连接关系之时至新电池模块与agv建立连接关系之前的这段时间内,agv可能并未与电池模块连接,因此无法使用电池模块的电能。因此为了保证在上述四个步骤的执行过程中agv不断电,本实施例可以在上述s20至s50这四个步骤的执行过程中使agv始终处于预充电状态。预充电状态即通过外部临时连接的方式为agv进行临时供电。
244.在本实施例中,预充电线路可以在执行s20之前便已经完成与agv的连通。具体而言,预充电线路可以在执行s10之前便完成与agv的连通,之后再执行s10。或者预充电线路也可以在执行s10的过程中完成与agv的连通。例如在上述换电站的实施例中,预充电线路可以在对agv的水平位置进行定位的过程中同步进行。当然,在其它一些实施例中,预充电
线路也可能在agv的定位开始前或完成后再执行。同时,在本实施例中,在s50执行完毕之后可以再将agv与预充电线路断开。预充电电路与agv的连接结构可参考上述换电站的预充电机构106的相关结构,在此不再赘述。除此之外,预充电线路也可以在s10执行完毕之后,并在s20开始执行之前完成与agv的连通。
245.对于存在将agv由初始位置向上抬升并将电池拆装机构水平移动至agv的下方的步骤的实施例,在完成s50之后还可以进一步将新电池模块脱离电池拆装机构,再将电池拆装机构水平移出agv的下方并将agv向下降落至初始位置,从而使设备回归原始状态。既有利于agv由初始位置离开,也有利于下一辆agv的进入。该过程同样可由上述换电站实施,且相关实施方式已经在上述实施例中阐明。
246.综上所述,本申请实施例所提供的agv的电池更换方法具有节约换电时间、提升agv工作效率、换店速度快、精度高、自动化程度高等诸多优点。
247.本申请上文实施例中重点描述的是各个实施例之间的不同,各个实施例之间不同的优化特征只要不矛盾,均可以组合形成更优的实施例,考虑到行文简洁,在此则不再赘述。
248.以上所述仅为本申请的实施例而已,并不用于限制本申请。对于本领域技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本申请的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1