一种大棚拖拉机专用前驱动桥的制作方法
1.本实用新型涉及一种大棚拖拉机专用前驱动桥。
背景技术:
2.现有一种拖拉机,包括前驱动桥,前驱动桥包括壳体、转向机构、中央传动机构、差速器、左半轴、左立轴、左末端传动轴、右半轴、右立轴和右末端传动轴,转向机构设置在壳体的外侧,中央传动机构设置在壳体的内中部,差速器设置在中央传动机构上,左半轴和右半轴分别设置在壳体的左侧和右侧,左立轴和右立轴分别设置在左立轴座套和右立轴座套中,左立轴座套和右立轴座套分别连接在壳体的左端部和右端部上。左半轴的一端和右半轴的一端分别与中央传动机构的左侧和右侧相连,左半轴的另一端和右半轴的另一端分别通过锥齿轮与左立轴上端的锥齿轮和右立轴上端的齿轮相啮合。左末端传动轴一端和右末端传动轴一端分别通过锥齿轮与左立轴下端的锥齿轮和右立轴下端的齿轮相啮合,左末端传动轴另一端和右末端传动轴另一端分别装有左前轮和右前轮。在上述前驱动桥的结构中,由于左半轴与左末端传动轴之间存在左立轴的高度差,以及右半轴与右末端传动轴之间存在右立轴的高度差,因此导致机身偏高,难以适应在大棚田间的作业。同时,由于受到左立轴座套和右立轴座套的结构限制,转向角度较小,因此也限制了在大棚田间的作业。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种大棚拖拉机专用前驱动桥,该拖拉机专用前驱动桥不仅能够降低拖拉机的机身高度,而且转向角度大,从而满足大棚田间作业的要求。
4.为了解决上述技术问题,本实用新型一种大棚拖拉机专用前驱动桥,含有壳体、转向机构、中央传动机构、差速器、左半轴、右半轴、左末端传动轴和右末端传动轴,转向机构设置在壳体的外侧,中央传动机构设置在壳体的内中部,差速器设置在中央传动机构上,左半轴和右半轴分别设置在壳体的左侧和右侧,左半轴的右端和右半轴的左端分别与中央传动机构的左侧和右侧相连,还包括左万向节、右万向节、左行星轮机构、右行星轮机构、左末端传动壳和右末端传动壳,壳体左侧端的上端设有左上轴、壳体左侧端的下端设有左下轴,所述左上轴和左下轴的轴线重合,左上轴和左下轴能够相对于壳体左侧端转动,壳体右侧端的上端设有右上轴、壳体右侧端的下端设有右下轴,所述右上轴和右下轴的轴线重合,右上轴和右下轴能够相对于壳体右侧端转动;左末端传动壳包括左壳一和左壳二,左壳一的右端设置在左上轴和左下轴上,左壳一的左端部穿装在左壳二的内部,左壳一与左壳二构成转动连接,左末端传动轴穿装在左壳一内且与左壳一构成转动连接,左万向节的右端与左半轴的左端相连,左万向节的左端与左末端传动轴的右端相连,左行星轮机构包括左太阳轮、左行星轮、左行星轮架和左齿圈,左太阳轮设置在左末端传动轴的左端上,左行星轮设置在左行轮架上,左太阳轮与左行星轮相啮合,左行星轮与左齿圈相啮合,左齿圈设置在左壳一的左端上,左行星轮架设置在壳二的左端上;右末端传动壳包括右壳一和右壳二,右
壳一的左端设置在右上轴和右下轴上,右壳一的右端部穿装在右壳二的内部,右壳一与右壳二构成转动连接,右末端传动轴穿装在右壳一内且与右壳一构成转动连接,右万向节的左端与右半轴的右端相连,右万向节的右端与右末端传动轴的左端相连,右行星轮机构包括右太阳轮、右行星轮、右行星轮架和右齿圈,右太阳轮设置在右末端传动轴的右端上,右行星轮设置在右行轮架上,右太阳轮与右行星轮相啮合,右行星轮与右齿圈相啮合,右齿圈设置在右壳一的右端上,右行星轮架设置在右壳二的右端上。
5.所述左末端传动壳和右末端传动壳的结构对称, 所述左末端传动轴和右末端传动轴的结构对称,所述左万向节和右万向节的结构对称,所述左行星轮机构和右行星轮机构的结构对称。
6.所述左上轴和左下轴的轴线向内倾斜的角度为7
°
,所述右上轴和右下轴的轴线向内倾斜的角度为7
°
。
7.所述左末端传动轴向下倾斜的倾斜的角度为3.5
°
,所述右末端传动轴向下倾斜的倾斜的角度为3.5
°
。
8.所述左末端传动壳绕左上轴和左下轴的转动角度为51
°
,所述右末端传动壳绕右上轴和右下轴的转动角度为51
°
。
9.所述左万向节和右万向节均为等速万向节。
10.所述左万向节中的左行星轮和右万向节中的右行星轮均为三个。
11.在上述大棚拖拉机专用前驱动桥中,由于去除了现有技术的左立轴和右立轴,左半轴与左末端传动轴之间直接采用左万向节连接,右半轴与右末端传动轴之间直接采用右万向节连接,从而使左半轴与左末端传动轴之间的高度差、以及右半轴与右末端传动轴之间的高度差均为零,因此使机身的高度能够得到降低,满足大棚田间作业的要求。同时,由于左半轴与左末端传动轴之间直接采用左万向节连接,右半轴与右末端传动轴之间直接采用右万向节接,克服了现有技术受左立轴座套和右立轴座套结构限制而导致转向角度较小的不足,从而使左末端传动壳绕左上轴和左下轴的转动角度达到了51
°
,右末端传动壳绕右上轴和右下轴的转动角度达到了为51
°
,因此满足大棚田间作业的要求。
附图说明
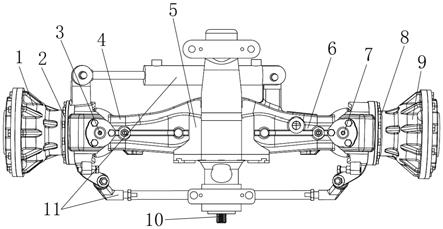
12.图1是大棚拖拉机专用前驱动桥的结构示意图;
13.图2是图1的左末端传动壳、左末端传动轴、左半轴、左万向节、左上轴、左下轴和壳体左端部的仰视剖面结构放大示意图;
14.图3是图1的左视结构放大示意图。
具体实施方式
15.下面结合附图对本实用新型的技术方案做进一步的详细说明:
16.如图1、图2和图3所示, 本实用新型公开了一种大棚拖拉机专用前驱动桥,含有壳体5、转向机构11、中央传动机构10、差速器、左半轴15、右半轴、左末端传动轴18和右末端传动轴。转向机构11设置在壳体5的外侧,中央传动机构10设置在壳体5的内中部,差速器设置在中央传动机构10上。左半轴15和右半轴分别设置在壳体5的左侧4和右侧6。左半轴15的右端和右半轴的左端分别与中央传动机构10的左侧和右侧相连。上述大棚拖拉机专用前驱动
桥,还包括左万向节17、右万向节、左行星轮机构、右行星轮机构、左末端传动壳和右末端传动壳。如图2所示,壳体5左侧端的上端设有左上轴3、壳体5左侧端的下端设有左下轴16,所述左上轴3和左下轴16的轴线重合,左上轴3和左下轴16能够相对于壳体5左侧端转动;同样,壳体5右侧端的上端设有右上轴7、壳体右侧端的下端设有右下轴,所述右上轴7和右下轴的轴线重合,右上轴7和右下轴能够相对于壳体5右侧端转动。如图2所示,左末端传动壳包括左壳一2和左壳二1,左壳一2的右端设置在左上轴3和左下轴16上,左壳一2的左端部穿装在左壳二1的内部,左壳一2与左壳二1构成转动连接。实际上,左壳一2可以通过轴承与左壳二1构成转动连接。左末端传动轴18穿装在左壳一2内且与左壳一2构成转动连接。如图2所示,左万向节17的右端与左半轴15的左端相连,左万向节17的左端与左末端传动轴18的右端相连。左行星轮机构包括左太阳轮14、左行星轮13、左行星轮架19和左齿圈12。左太阳轮14设置在左末端传动轴18的左端上,左行星轮13设置在左行轮架19上,左太阳轮14与左行星轮13相啮合,左行星轮13与左齿圈12相啮合,左齿圈12设置在左壳一2的左端上,左行星轮架19设置在壳二1的左端上。同样,右末端传动壳包括右壳一8和右壳二9,右壳一8的左端设置在右上轴7和右下轴上,右壳一8的右端部穿装在右壳二9的内部,右壳一8与右壳二9构成转动连接。右末端传动轴穿装在右壳一8内且与右壳一8构成转动连接。右万向节的左端与右半轴的右端相连,右万向节的右端与右末端传动轴的左端相连。右行星轮机构包括右太阳轮、右行星轮、右行星轮架和右齿圈,右太阳轮设置在右末端传动轴的右端上,右行星轮设置在右行轮架上,右太阳轮与右行星轮相啮合,右行星轮与右齿圈相啮合,右齿圈设置在右壳一8的右端上,右行星轮架设置在右壳二9的右端上。
17.为简化结构,降低生产成本,所述左末端传动壳和右末端传动壳的结构对称, 所述左末端传动轴18和右末端传动轴的结构对称,所述左万向节和右万向节的结构对称,所述左行星轮机构和右行星轮机构的结构对称。
18.为提高操控性和行驶稳定性,所述左上轴3和左下轴16的轴线向内倾斜的角度为7
°
,所述右上轴7和右下轴的轴线向内倾斜的角度为7
°
。
19.为提高操控性和行驶稳定性,所述左末端传动轴18向下倾斜的倾斜的角度为3.5
°
,所述右末端传动轴向下倾斜的倾斜的角度为3.5
°
。
20.为实现较小的转弯半径,所述左末端传动壳绕左上轴3和左下轴16的转动角度为51
°
,所述右末端传动壳绕右上轴7和右下轴的转动角度为51
°
。
21.为提高行驶的稳定性和优化结构,所述左万向节和右万向节均为等速万向节。
22.为简化和优化结构,所述左万向节中的左行星轮13和右万向节中的右行星轮均为三个。
23.使用上述大棚拖拉机专用前驱动桥时,左前轮和右前轮分别设置在左末端传动壳的左壳二1和右末端传动壳的右壳二9上,动力从变速箱传输到中央传动机构10,中央传动机构10同时带动左半轴15和右半轴转动,左半轴15通过左万向节17带动左末端传动轴18转动,左末端传动轴18带动左行星轮机构的左太阳轮14转动,左太阳轮14带动左行星轮13转动,左行星轮13带动左行星轮架19转动,左行星轮架19带动左末端传动壳的左壳二1转动,这时左前轮跟随左壳二1转动。与此同时,右半轴通过右万向节带动右末端传动轴转动,右末端传动轴带动右行星轮机构的右太阳轮转动,右太阳轮带动右行星轮转动,右行星轮带动右行星轮架转动,右行星轮架带动右末端传动壳的右壳二9转动,这时右前轮跟随左壳二
9转动。转向时,在转向机构11的作用下,左末端传动壳的左壳一2绕左上轴3和左下轴16转动,同时,右末端传动壳的右壳一8绕右上轴7和左下轴转动,从而实现转向。
24.上述大棚拖拉机专用前驱动桥,去除了现有技术的左立轴和右立轴,左半轴15与左末端传动轴18之间直接采用左万向节连接,右半轴与右末端传动轴之间直接采用右万向节连接,从而使左半轴15与左末端传动轴18之间的高度差、以及右半轴与右末端传动轴之间的高度差均为零,因此使机身的高度能够得到降低,满足大棚田间作业的要求。同时,由于左半轴15与左末端传动轴18之间直接采用左万向节连接,右半轴与右末端传动轴之间直接采用右万向节接,克服了现有技术受左立轴座套和右立轴座套结构限制而导致转向角度较小的不足,从而使左末端传动壳的右壳二9绕左上轴3和左下轴16的转动角度达到了51
°
,右末端传动壳绕右上轴7和右下轴的转动角度达到了为51
°
,因此满足大棚田间作业的要求。
25.以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1