一种轮辐式变径车轮的制作方法
[0001]
本实用新型属于智能越障设备领域,具体涉及一种轮辐式变径车轮。
背景技术:
[0002]
现有的越障机器人从移动方式上分为轮式、履带式、腿式以及球型机器人,不同的移动方式使其具有不同的移动效果以及所适应的工作环境。轮式移动机器人在平整的结构化路面具有独特的速度优势,履带式移动机器人在起伏的非结构化路面具有良好的通过性,腿式移动机器人在崎岖山路等复杂路面具有优越的越障性能,球型移动机器人具有移动效率高与节能性的特点。目前没有某一种结构能够同时兼具上述的所有性能,现有的移动机器人大都是利用上述几种移动结构的两两组合甚至多种组合实现应对多种不同混合式的路面情况。
[0003]
但是大多数移动结构由于本身的结构原因,导致结合起来有很大的限制,进而导致机器人在通过不同路面各个结构进行转换时,非常不灵活,十分影响机器人通过的效率,限制了其应用领域的发展。
技术实现要素:
[0004]
为了解决上述现有技术中存在的缺点,本实用新型提供一种轮辐式变径车轮,具体方案如下:
[0005]
包括安装于圆筒状车身两端的车轮本体,所述圆筒状车身的内壁通过电机固定架设有两个轴向布置的驱动电机,两个所述驱动电机的输出轴伸出所述圆筒状车身的两端且与所述圆筒状车身的中心轴重合;所述车轮本体包括穿设于所述驱动电机输出轴上的内圆盘,所述内圆盘上铰接有若干沿圆周均匀布置的轮辐杆,所述内圆盘上还设有用于控制所述轮辐杆绕铰接点旋转的调节组件。
[0006]
进一步地,所述内圆盘正对所述圆筒状车身侧面靠近边缘的位置垂直设有若干沿圆周均匀布置的第一旋转轴,所述轮辐杆的一端连接于所述第一旋转轴上;所述调节组件包括设于所述内圆盘外且与所述内圆盘同心的外圆环,所述外圆环上设有若干沿圆周均匀布置供所述轮辐杆穿过的套接装置。
[0007]
进一步地,所述外圆环正对所述圆筒状车身侧面垂直设有若干与所述第一旋转轴对应的第二旋转轴,所述套接装置包括连接于所述第二旋转轴上且与所述外圆环平行布置的外圆旋转杆,所述外圆旋转杆内开设有轴向布置的容置腔,所述容置腔与所述轮辐杆间隙配合。
[0008]
进一步地,所述轮辐杆的另一端成型为防滑端,所述防滑端的直径大于所述容置腔的内径。
[0009]
进一步地,所述内圆盘正对所述圆筒状车身的一侧偏心设有调节电机,所述调节电机的输出轴与所述圆筒状车身的中心轴平行且穿过所述内圆盘,所述调节电机的输出轴的末端套设有调节齿轮,所述外圆环的内环成型有与所述调节齿轮啮合的内齿。
[0010]
进一步地,所述外圆环远离所述圆筒状车身的一侧还设有外圆盘。
[0011]
进一步地,所述圆筒状车身上连接有配重杆。
[0012]
进一步地,所述轮辐杆为柔质的弹性杆。
[0013]
本实用新型的有益效果在于:
[0014]
本实用新型提出的一种轮辐式变径车轮,在行进过程中,足端近似圆轮与地面接触为离散点,因此具有更强的越障能力;灵活性高,通过车轮变形可以实现越障以及转向功能,调节响应速度快,从而提高地形适应性与机动性。
附图说明
[0015]
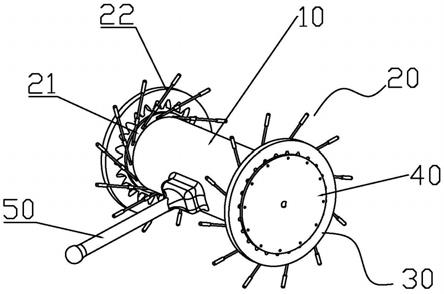
图1为本实用新型的结构示意图,
[0016]
图2为本实用新型圆筒状车身的内部结构示意图,
[0017]
图3为本实用新型车轮本体的结构示意图,
[0018]
图4为本实用新型车轮本体的工作状态i示意图(背视方向),
[0019]
图5为本实用新型车轮本体的工作状态i示意图(主视方向),
[0020]
图6为本实用新型车轮本体的工作状态ii示意图(主视方向)。
[0021]
附图序号及名称:10、圆筒状车身,11、电机固定架,12、驱动电机,20、车轮本体,21、内圆盘,22、轮辐杆,23、第一旋转轴,24、调节电机,25、调节齿轮,30、调节组件,31、外圆环,32、第二旋转轴,33、外圆旋转杆,40、外圆盘,50、配重杆。
具体实施方式
[0022]
为详细说明本实用新型之技术内容、构造特征、所达成目的及功效,以下兹例举实施例并配合附图详予说明。
[0023]
结合图1和图2,本实用新型公开了一种轮辐式变径车轮,包括安装于圆筒状车身10两端的车轮本体20,圆筒状车身10的内壁通过电机固定架11设有两个轴向布置的驱动电机12,两个驱动电机12的输出轴伸出圆筒状车身10的两端且与圆筒状车身10的中心轴重合;车轮本体20包括穿设于驱动电机12输出轴上的内圆盘21,内圆盘21上铰接有若干沿圆周均匀布置的轮辐杆22,内圆盘21上还设有用于控制轮辐杆22绕铰接点旋转的调节组件30。
[0024]
如图3,内圆盘21正对圆筒状车身10侧面靠近边缘的位置垂直设有若干沿圆周均匀布置的第一旋转轴23,轮辐杆22的一端连接于第一旋转轴23上;调节组件30包括设于内圆盘21外且与内圆盘21同心的外圆环31,外圆环31上设有若干沿圆周均匀布置供轮辐杆22穿过的套接装置。
[0025]
外圆环31正对圆筒状车身10侧面垂直设有若干与第一旋转轴23对应的第二旋转轴32,具体实施过程中,套接装置包括连接于第二旋转轴32上且与外圆环31平行布置的外圆旋转杆33,外圆旋转杆33内开设有轴向布置的容置腔;容置腔与轮辐杆22间隙配合,这样外圆旋转杆不仅可以随着轮辐杆角度的变化而转动,同时轮辐杆还能沿着外圆旋转杆滑动。外圆旋转杆一方面用于限制轮辐杆的位置,另一方面可以绕第二旋转轴转动以适应轮辐杆角度的变化。
[0026]
轮辐杆22的另一端成型为防滑端,防滑端的直径大于容置腔的内径,具体实施时
可以在轮辐杆的末端套接一个橡胶套,增大轮辐杆末端与地面或障碍物的摩擦力。
[0027]
结合图3和图4,内圆盘21正对圆筒状车身10的一侧偏心设有调节电机24,调节电机24的输出轴与圆筒状车身10的中心轴平行且穿过内圆盘21,调节电机24的输出轴的末端套设有调节齿轮25,外圆环31的内环成型有与调节齿轮25啮合的内齿。通过调节电机的正转反转,可以实现外圆环绕中心轴顺时针或逆时针转动。
[0028]
如图1,外圆环31远离圆筒状车身10的一侧还设有外圆盘40,起到遮挡的作用,避免各传动组件暴露在外,同时对内圆盘上的调节齿轮也起到一定的位置限制作用。
[0029]
如图1,圆筒状车身10上连接有配重杆50,保证圆筒形车身重心的稳定性,防止运动时车轮不动圆筒形车身空转。
[0030]
在本申请的另一个实施例中,轮辐杆22为柔质的弹性杆,在行进过程中柔性导杆可以发生一定的变形,从而实现减震功能,不需要额外设置减震结构。
[0031]
本实用新型的工作原理如下:
[0032]
1.当在平坦的地面上行走时,调节电机通过调节齿轮带动外圆环沿如图5所示的逆时针方向转动,进而通过外圆旋转杆带着轮辐杆绕第一旋转轴沿逆时针转动直至极限位置,然后驱动电机通过内圆盘带着轮辐杆转动,此时轮辐杆与地面为小角度接触(如图5所示),车身可在平坦路面上高速行进;
[0033]
2.当在碎石路面上行走或者轮翻越障碍物时,调节电机通过调节齿轮带动外圆环沿如图5所示的顺时针方向转动,进而通过外圆旋转杆带着轮辐杆绕第一旋转轴沿顺时针转动直至轮辐杆沿内圆盘的径向方向布置,然后驱动电机通过内圆盘带着轮辐杆转动,此时轮辐杆与地面为大角度接触(如图6所示),使车身具有更好地适应性。
[0034]
此外,当两个车身车轮转速相同时,通过车身车轮变径调整左右两车轮大小实现不需要设置转向装置就可以让车身快速转向:例如当左侧车轮的直径小于右侧车轮的直径时,车身会向左转;当左侧车轮的直径大于右侧车轮的直径时,车身会向右转。
[0035]
综上,仅为本实用新型之较佳实施例,不以此限定本实用新型的保护范围,凡依本实用新型专利范围及说明书内容所作的等效变化与修饰,皆为本实用新型专利涵盖的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1