车厢内检测装置及车厢内检测方法与流程
1.本公开涉及车厢内检测装置及车厢内检测方法。
背景技术:
2.已知一种基于设置在车厢内的电波传感器来检测存在于后排座位(以下称为“后座”)上的乘客(以下称为“后座乘客”)的技术。例如,在专利文献1中公开了一种通过将电波传感器设置在前排座位(以下称为“前座”)内、并从该设置位置向后座方向发送电波来检测后座乘客的乘客状态检测系统。现有技术文献专利文献
3.专利文献1:日本专利特开2018-202921号公报
技术实现要素:
发明所要解决的技术问题
4.如专利文献1中公开的乘客状态检测系统那样,在将电波传感器设置在前座内的情况下,有可能因前座的振动或设置在前座的座椅后袋等而无法检测到后座乘客。因此,可以考虑将电波传感器设置在座位上方、并从该设置位置向后座方向发送电波来检测后座乘客的方法。但是,在将电波传感器设置在座位上方的情况下,根据存在于前座的乘客(以下称为“前座乘客”)的入座状态,有可能将前座乘客误检测为后座乘客。前座乘客的就座状态是指前座乘客的姿势或就座位置等。
5.本公开是为了解决上述问题而提出的,其目的在于,在考虑前座乘客的就座状态的情况下检测后座乘客。用于解决技术问题的技术手段
6.本公开所涉及的车厢内检测装置包括:第一数据获取部,该第一数据获取部获取由第一传感器所获取的第一数据;第二数据获取部,该第二数据获取部获取由设置在车厢内座位上方的第二传感器所获取的第二数据;前座乘客位置推测部,该前座乘客位置推测部基于第一数据获取部所获取的第一数据,来推测前座乘客的位置;检测范围决定部,该检测范围决定部基于前座乘客位置推测部所推测的前座乘客的位置,来决定第二传感器的检测范围;以及后座乘客检测部,该后座乘客检测部基于第二数据获取部所获取的第二数据和检测范围决定部所决定的第二传感器的检测范围,来检测后座乘客。发明效果
7.根据本公开,车厢内检测装置能够在考虑前座乘客的入座状态的情况下检测后座乘客。
附图说明
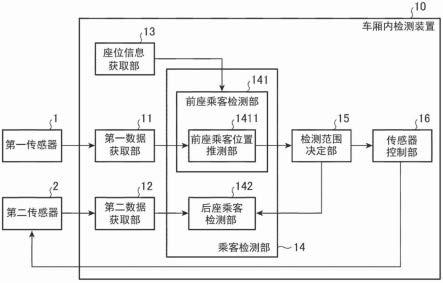
8.图1a是表示实施方式1所涉及的车厢内检测装置的结构例的框图。图1b是表示实施方式1所涉及的车厢内检测装置的另一结构例的框图。图2a是表示实施方式1中车辆中的摄像头的设置例的图,图2b是表示实施方式1中车辆中的雷达的设置例的图。图3a是表示实施方式1中摄像头的可拍摄范围的图像的一个示例的图,图3b是表示实施方式1中雷达的可检测范围的图像的一个示例的图。图4a、图4b及图4c是表示实施方式1中前座、后座和分割区域的位置关系的一个示例的图。图5a、图5b、图5c及图5d是表示实施方式1中检测范围决定部决定的检测范围的图像的一个示例的图。图6是表示实施方式1中检测范围决定部决定为没有雷达的检测范围的情况下的车厢内的状态的一个示例的图。图7是用于对实施方式1所涉及的车厢内检测装置的动作进行说明的流程图。图8a和图8b是示出实施方式1所涉及的车厢内检测装置的硬件结构的一个示例的图。图9是用于说明在实施方式1中通过改变雷达发送毫米波的方向来决定检测范围的情况下检测范围的图像的一个示例的图。图10a和图10b是用于说明当雷达设置在后座上方以外的地方时的雷达设置位置的一个示例和雷达的检测范围的一个示例的图。图11是用于说明实施方式1中检测范围决定部的可检测范围的分割方法的一个示例的图。
具体实施方式
9.下面,为了更详细地说明本公开,根据附图对用于实施本公开的方式进行说明。实施方式1图1a是表示实施方式1所涉及的车厢内检测装置10的结构例的框图。车厢内检测装置10与第一传感器1和第二传感器2连接。第一传感器1、第二传感器2和车厢内检测装置10搭载在车辆30(参照图2)上。
10.第一传感器1和第二传感器2是能够检测车内乘客的传感器,例如是摄像头或雷达。雷达使用比光频域低的高频波段中的微波波段或毫米波等的波段。车厢内检测装置10基于从第一传感器1及第二传感器2输出的数据,检测存在于车厢内的乘客。车厢内检测装置10通过第一数据和第二数据的组合,能够精确地检测后座乘客。车厢内检测装置10在检测后座乘客时,在考虑基于由第一传感器1获取的第一数据而推测出的前座乘客的位置的基础上,基于由第二传感器2获取的第二数据来进行对后座乘客的检测。
11.由车厢内检测装置10进行的乘客检测可以在车辆30行驶中进行,也可以在车辆30停止后进行。此外,车厢内检测装置10进行乘客检测的定时可以是车辆30停止的瞬间,也可
以是从车辆30停止的瞬间起经过了一定时间之后。这里,车辆30的停止可以是暂时的停止(即停车),也可以是持续的停止(即停车)。另外,车厢内检测装置10从车辆30获取换挡杆或驻车制动的信息等表示车辆30是否停止的信息即可。
12.车厢内检测装置10包括第一数据获取部11、第二数据获取部12、座位信息获取部13、乘客检测部14、检测范围决定部15、以及传感器控制部16。乘客检测部14包括前座乘客检测部141和后座乘客检测部142。前座乘客检测部141包括前座乘客位置推测部1411。
13.第一数据获取部11获取由第一传感器1获取的第一数据。第一数据获取部11将获取的第一数据输出到乘客检测部14的前座乘客检测部141。
14.第二数据获取部12获取由第二传感器2获取的第二数据。第二数据获取部12将获取的第二数据输出到乘客检测部14的后座乘客检测部142。
15.座位信息获取部13获取与车厢内的座位有关的信息(以下称为“座位信息”)。座位信息例如是与座位的前后滑动位置、座位靠背的角度或者座面的高度有关的信息。座位信息获取部13例如从车辆30所具备的座位控制部(省略图示)获取座位信息。座位控制部例如通过驱动滑动用电动机(省略图示)或倾斜用电动机(省略图示)等,控制座位的前后滑动位置、座位靠背的角度或座面的高度。座位信息获取部13将获取的座位信息输出到乘客检测部14的前座乘客检测部141。
16.乘客检测部14根据第一数据获取部11获取的第一数据或第二数据获取部12获取的第二数据,检测存在于车辆30中的乘客。乘客检测部14的前座乘客检测部141基于第一数据获取部11获取的第一数据,检测车辆30的前座乘客。当前座乘客检测部141检测到前座乘客时,前座乘客位置推测部1411基于第一数据获取部11获取的第一数据和座位信息获取部13获取的座位信息,推测前座乘客的位置。在实施方式1中,作为一个示例,前座乘客的位置是前座乘客的头部位置。前座乘客位置推测部1411将推测出的与前座乘客的位置有关的信息输出到检测范围决定部15。另外,前座乘客检测部141在没有检测到前座乘客的情况下,将没有检测到前座乘客的情况的信息输出到检测范围决定部15。
17.乘客检测部14的后座乘客检测部142基于第二数据获取部12获取的第二数据和检测范围决定部15决定的第二传感器2的检测范围,检测车辆30的后座乘客。具体而言,后座乘客检测部142基于在第二传感器2的检测范围中获取的第二数据,检测后座乘客。
18.由乘客检测部14进行的乘客检测可以是分析所获取的数据而进行的检测,也可以是通过将所获取的数据与预先准备的数据或阈值进行比较而进行的检测。
19.检测范围决定部15基于由前座乘客位置推测部1411推测的前座乘客的位置,决定第二传感器2的检测范围。稍后将详细描述由检测范围决定部15决定的第二传感器2的检测范围。检测范围决定部15在前座乘客位置推测部1411推测的前座乘客的位置位于车厢
内的后座乘客不可检测区域内的情况下,判定为不能基于由第二传感器2获取的第二数据来检测后座乘客,决定为没有第二传感器2的检测范围。在实施方式1中,“后座乘客不可检测区域”是在该后座乘客检测不可区域中检测到前座乘客的情况下假定由前座乘客不能正确检测后座乘客的区域。适当设定后座乘客不可检测区域。关于后座乘客不可检测区域的详细情况,在后文中阐述。
20.检测范围决定部15将与所决定的第二传感器2的检测范围有关的信息输出到后座乘客检测部142。当决定为没有第二传感器2的检测范围时,检测范围决定部15向后座乘客检测部142和传感器控制部16输出内容为决定为没有第二传感器2的检测范围的信息。
21.传感器控制部16在检测范围决定部15决定为没有第二传感器2的检测范围的情况下,关闭第二传感器2的电源。具体而言,例如,传感器控制部16向第二传感器2发送用于断开第二传感器2的电源的控制信号。
22.以下,将记载第一传感器1是摄像头并且第二传感器2是发送毫米波的雷达的示例。另外,以下所示的实施方式为一个示例,但本发明并不限于这些实施方式。
23.图1b是表示实施方式1所涉及的车厢内检测装置10的结构例的框图,是使用摄像头1a作为第一传感器1、使用雷达2a作为第二传感器2的示例。在该示例中,将第一数据获取部11称为获取摄像头1a拍摄的图像数据的图像获取部11a,将第二数据获取部12称为获取雷达2a测定的距离数据的距离获取部12a。
24.图2是示出车辆30中的摄像头1a和雷达2a的设置例的图。图2a是示出摄像头1a的设置例的图,图2b是示出雷达2a的设置例的图。图3是表示摄像头1a能够拍摄的范围(以下称为“可拍摄范围”)1a的图像的一个示例和雷达2a能够检测车厢内的物体的范围(以下称为“可检测范围”)2a的图像的一个示例的图。图3a是示出摄像头1a的可拍摄范围1a的图像的一个示例的图,图3b是示出雷达2a的可检测范围2a的图像的一个示例的图。在图2和图3的图示示例中,前座乘客33和后座乘客34分别坐在前座31和后座32。另外,在图2和图3的图示例中,前座乘客33是驾驶员和副驾驶席上的乘客,后座乘客34是坐在副驾驶席后面的乘客。此外,在图2和图3所示的图示例中,前座乘客33和后座乘客34都是大人。
25.摄像头1a设置在车厢内前方的仪表板或仪表盘等上,至少对前座31进行拍摄。摄像头1a例如可以与为了监视车辆内的驾驶员的状态而搭载于车辆30的所谓的“驾驶员监控系统(driver monitoring system,dms)”所具有的摄像头共用。
26.雷达2a设置在后座32的上方。后座32的上方是指比后座32更上方的位置。另外,在实施方式1中,前座31或后座32等设置在车厢内的座位的上方是指将该座位调整成使该座位的头枕位于最高位置的状态下该座椅的头枕上方。雷达2a向后座32发送毫米波,并且接收由运动的物体对该毫米波进行反射而形成的反射波。雷达2a使用毫米波的收发结果测定从雷达2a的设置位置到反射毫米波的运动物体的距离。另外,通过使用雷达2a,车厢内检测装置10能够根据由呼吸引起的胸部运动或心跳等检测乘客。
27.在摄像头1a的可拍摄范围1a中存在由前座31隐藏的部分等死角,车厢内检测装置
10仅从摄像头1a拍摄的图像(以下称为“车厢内图像”)无法检测存在于死角处的乘客。另外,即使增加摄像头1a的设置数量以消除不被车厢内图像所反映的死角,车厢内检测装置10也不能检测例如全身被毛毯等覆盖的乘客。为了检测存在于车厢内图像中没有出现的死角处的乘客,或者全身被毛毯等覆盖的乘客,例如可以考虑通过设置在座位下的传感器(薄膜开关)进行乘客检测的方法。但是,该方法无法判定是否存在例如体重较轻的儿童、放在儿童安全座椅上的婴幼儿、或者宠物等乘客的体格差异。近年来,车厢内的宠物或幼儿被遗忘等成为社会问题,希望考虑体格差异的乘客检测。
28.因此,在车厢内搭载能够精确检测各种体格的乘客、各种姿势的乘客、或者坐在儿童安全座椅上的婴幼儿等的电波传感器、并根据该电波传感器发送的电波检测乘客的研究正在进行中。电波传感器发送的电波能够对车内图像中没有出现的乘客做出反应。此外,由于电波透过树脂及毛毯等,全身被毛毯覆盖的乘客也能被检测到。使用电波传感器的乘客检测也能够判定检测到的乘客的体格差。在实施方式1中,车厢内检测装置10使用电波传感器,具体地说,使用雷达2a来进行很难被检测到的后座乘客34的检测。车厢内检测装置10组合摄像头1a和雷达2a,谋求提高乘客检测的精度。此外,车厢内检测装置10通过雷达2a发送的毫米波来对考虑到乘客的体格差异的乘客进行检测。后文将通过列举具体示例来描述通过由雷达2a发送的毫米波来进行考虑到乘客的体格差异的乘客检测。
29.车厢内检测装置10包括图像获取部11a、距离获取部12a、座位信息获取部13、乘客检测部14、检测范围决定部15、以及传感器控制部16。乘客检测部14包括前座乘客检测部141和后座乘客检测部142。前座乘客检测部141包括前座乘客位置推测部1411。
30.图像获取部11a从摄像头1a获取摄像头1a在车厢内拍摄的图像数据。图像获取部11a将从摄像头1a获取的图像数据输出到乘客检测部14的前座乘客检测部141。
31.距离获取部12a从雷达2a获取雷达2a对到车厢内各物体的距离进行测定而得的距离数据。距离获取部12a将从雷达2a获取的距离数据输出到乘客检测部14的后座乘客检测部142。
32.座位信息获取部13获取座位信息。座位信息获取部13将获取的座位信息输出到乘客检测部14的前座乘客检测部141。
33.乘客检测部14基于图像获取部11a获取的图像数据或者距离获取部12a获取的距离数据,检测存在于车辆30中的乘客。乘客检测部14的前座乘客检测部141基于图像获取部11a获取的图像数据,检测前座乘客33。具体而言,例如,前座乘客检测部141使用已知的图像识别技术分析基于图像数据的车厢内图像来检测前座乘客33即可。此外,前座乘客检测部141例如也能够根据前座乘客33的开眼度或面部朝向等判定是否有前座乘客33在打瞌睡、前座乘客33的睡意或是否有前座乘客33在侧视。前座乘客检测部141例如在前座乘客33是副驾驶席的乘客的情况下,也可
以将瞌睡或睡意的判定结果反馈至在车厢内重放音乐的重放控制装置(省略图示)或控制空调的空调控制装置(省略图示)等进行用于保持室内环境舒适的控制的控制装置。
34.当前座乘客检测部141检测到前座乘客33时,前座乘客位置推测部1411基于图像获取部11a获取的图像数据和座位信息获取部13获取的座位信息,推测前座乘客33的位置。另外,如上所述,在实施方式1中,前座乘客33的位置是指前座乘客33的头部位置。在此,前座乘客位置推测部1411例如将基于图像数据的车厢内图像上的前座乘客33的面部的中心设为前座乘客33的头部位置。
35.具体地说,例如,前座乘客位置推测部1411首先基于图像数据,使用已知的图像识别技术检测前座乘客33的面部。然后,前座乘客位置推测部1411判定检测出的前座乘客33的面部大小。前座乘客位置推测部1411根据该面部在基于图像数据的车厢内图像的坐标上的位置来判定前座乘客33的面部的大小即可。前座乘客位置推测部1411根据判定出的前座乘客33的面部的大小,判定摄像头1a与前座乘客33的面部中心的距离。例如,在具有标准面部大小的大人预先坐在前座31的标准位置的情况下,将在车厢内图像上被拍摄的面部的大小以及摄像头1a与该面部中心的距离存储为在基准的位置处作为基准的面部的大小以及摄像头1a与该面部的中心的距离。前座31的标准位置是指在标准滑动位置、标准座面高度、以及标准椅背倾斜的座位上坐有标准面部大小的大人时的就座位置。
36.前座乘客位置推测部1411通过将作为基准的面部的大小与判定的前座乘客33的面部的大小进行比较,判定摄像头1a与前座乘客33的面部的中心之间的距离即可。例如,相对于作为基准的面部的大小,在前座乘客33的面部的大小较大的情况下,相应地,前座乘客33的面部的中心较接近摄像头1a。换言之,摄像头1a与前座乘客33的面部中心的距离比摄像头1a与前座乘客33的面部中心的距离要短。前座乘客位置推测部1411在判定摄像头1a与前座乘客33的面部中心之间的距离时,基于座位信息,考虑当前的前座31的滑动位置、座面高度、以及座位的倾斜分别偏离标准的座位的位置、座面高度、以及座位的倾斜多少,来判定摄像头1a与前座乘客33的面部之间的距离。
37.例如,假设当前的前座31的座位的滑动位置在标准座位的滑动位置之前。此外,假设前座乘客33的面部的大小与标准的面部的大小相比极端小。该情况下,在车厢内图像中出现的前座乘客33的面部可以与标准面部的大小大致相同。前座乘客位置推测部1411仅根据车厢内图像来判定摄像头1a与前座乘客33的面部中心之间的距离时,设该前座乘客33坐在标准的位置,来判定摄像头1a与前座乘客33的面部中心之间的距离。因此,前座乘客位置推测部1411在推测前座乘客33的位置时,考虑座位信息。前座乘客位置推测部1411通过考虑座位信息,可知该前座乘客33坐在比标准位置靠前的位置。然后,前座乘客位置推测部1411能够更准确地判定摄像头1a与前座乘客33的面部中心的距离。
38.由于预先知道摄像头1a的设置位置及视场角,因此前座乘客位置推测部1411如果能够推测摄像头1a与前座乘客33的面部中心之间的距离,则可以推测前座乘客33的面部在车厢内的中心位置,换言之,可以推测前座乘客33的位置。前座乘客位置推测部1411将推测出的与前座乘客33的位置有关的信息输出到检测范围决定部15。
39.另外,前座乘客检测部141在没有检测到前座乘客33的情况下,将没有检测到前座
乘客33的情况的信息输出到检测范围决定部15。
40.乘客检测部14的后座乘客检测部142基于距离获取部12a获取的距离数据和检测范围决定部15决定的雷达2a的检测范围,检测车辆30的后座乘客34。具体而言,例如,后座乘客检测部142根据在雷达2a的检测范围中获取的距离数据,检测是否存在车辆30的后座乘客34。另外,后座乘客检测部142在检测范围决定部15决定为没有雷达2a的检测范围的情况下,不进行后座乘客34的检测。
41.检测范围决定部15基于由前座乘客位置推测部1411推测的前座乘客33的位置,决定雷达2a的检测范围。
42.这里,对检测范围决定部15决定的雷达2a的检测范围进行说明。检测范围决定部15将雷达2a的可检测范围2a分割为多个区域(以下称为“分割区域”),在雷达2a的可检测范围2a中,将用于检测后座乘客34的区域的分割区域决定为雷达2a的检测范围。另外,雷达2a的可检测范围2a是雷达2a能够在车厢内测定距离数据的范围,换言之,是雷达2a能够发送毫米波并且接收该毫米波被运动物体反射的反射波的范围。
43.在说明由检测范围决定部15决定的雷达2a的检测范围之前,首先使用图4列举几个例子来说明各种车厢内的状态。图4a示出了车厢内的状态,即,前座乘客33和后座乘客34分别坐在标准位置的前座31和标准位置的后座32。前座乘客33和后座乘客34均为大人。
44.检测范围决定部15将雷达2a的可检测范围2a分割为例如接近雷达2a的设置位置的第一区域41、比第一区域41远离设置位置的第二区域42、比第二区域42远离设置位置的第三区域43、比第三区域43远离设置位置的第四区域44、比第四区域44远离设置位置的第五区域45、以及比第五区域45远离设置位置的第六区域46。第一区域41、第二区域42、第三区域43、第四区域44、第五区域45以及第六区域46分别是分割区域。在图示例中,第一区域41是包含后座32的头枕的区域。第二区域42及第三区域43是包含后座32的椅背的区域,将包含该椅背的区域划分为头枕侧的区域和后座32的座面侧的区域,将第二区域42设为头枕侧的区域,将第三区域43设为座面侧的区域。第四区域44是包含后座32的座面的区域。第五区域45及第六区域46是包含后座32的脚下的区域。
45.这里,为了能够根据雷达2a测定的距离数据检测各种体格的后座乘客34或各种姿势的后座乘客34,希望将尽可能大的范围设为雷达2a的检测范围。但是,为了不将前座乘客33误检测为后座乘客34,雷达2a的检测范围必须是前座乘客33无法进入的范围。
46.例如,在图4a所示的车厢内的状态的情况下,当第四区域44、第五区域45及第六区域46包含在雷达2a的检测范围中时,后座乘客检测部142基于分类为第四区域44、第五区域45及第六区域46的距离数据,将前座乘客33误检测为后座乘客34。
47.另一方面,例如,如图4b所示,车厢内的状态是前座乘客33将前座31的滑动位置向后座32侧大幅度偏移而入座的状态。后座32坐着后座乘客34。前座乘客33和后座乘客34均为大人。在图4b所示的车厢内的状态的情况下,不仅第四区域44、第五区域45及第六区域46,第三区域43也包含在雷达2a的检测范围中时,后座乘客检测部142基于第三区域43、第四区域44、第五区域45及第六区域46中分类的距离数据,将前座乘客33误检测为后座乘客
34。在图4b中,虽然在后座32存在后座乘客34,但即使在后座32不存在后座乘客34的情况下,后座乘客检测部142也基于第三区域43、第四区域44、第五区域45及第六区域46中分类的距离数据,将前座乘客33误检测为后座乘客34。
48.假设能够得到如图4b所示的车厢内的状态,以第三区域43至第六区域46不包含在检测范围内的方式,固定地决定雷达2a的检测范围。这样一来,后座乘客检测部142产生误检测后座乘客34的可能性。例如,如图4c所示,车厢内的状态是在后座32中作为后座乘客34存在坐在儿童座椅上的婴幼儿35的状态。除了婴幼儿35以外没有乘客。在如图4c所示的车厢内的状态的情况下,当第三区域43或第四区域44不包含在雷达2a的检测范围中时,后座乘客检测部142误检测为不存在后座乘客34。
49.由此,通过雷达2a进行后座乘客34的检测时,根据有无前座乘客33、有前座乘客33时该前座乘客33的位置、前座乘客33的姿势或有后座乘客34时该后座乘客34的位置等,在可检测范围2a中,后座乘客34能够正确检测的范围发生变化。雷达2a的检测范围必须设定为是可检测范围2a(第一区域41至第六区域46)中尽可能大的区域,并且包含不会误检测到后座乘客34的区域。因此,检测范围决定部15基于前座乘客33的位置,动态地决定雷达2a的检测范围。
50.图5是用于说明检测范围决定部15决定的雷达2a的检测范围的一个示例的图。在图5中,将检测范围决定部15决定的雷达2a的检测范围表示为检测范围51。
51.例如,在车厢内的状态是如图4a所示的状态的情况下,检测范围决定部15为了不将前座乘客33误检测为后座乘客34,将第一区域41、第二区域42以及第三区域43决定为雷达2a的检测范围51(参照图5a)。后座乘客检测部142在距离数据被分类到第一区域41、第二区域42或第三区域43的情况下,即,雷达2a发送的毫米波在第一区域41、第二区域42或第三区域43中发生反射的情况下,设为能够检测到后座乘客34。后座乘客检测部142根据距离数据被分类到哪个区域,判定所检测到的后座乘客34的体格,也可以根据判定结果判定后座乘客34是大人、婴幼儿35还是宠物。具体而言,例如,在距离数据被分类到第一区域41的情况下,后座乘客检测部142判定为检测到的后座乘客34是大人。此外,例如,在距离数据被分类到第三区域43的情况下,后座乘客检测部142判定为检测到的后座乘客34是婴幼儿35。另外,在实施方式1中,成年人是即使被遗忘在车辆30上也能够依靠自身力量出至车外的体格的乘客,婴幼儿35是被遗忘在车辆30上就很难依靠自身力量出至车外的体格的乘客。
52.例如,在车厢内的状态是如图4b所示的状态的情况下,检测范围决定部15为了不将前座乘客33误检测为后座乘客34,将第一区域41和第二区域42决定为雷达2a的检测范围51(参照图5b)。后座乘客检测部142在距离数据被分类到第一区域41和第二区域42的情况下,即,雷达2a发送的毫米波在第一区域41或第二区域42中发生反射的情况下,设为能够检测到后座乘客34。
53.例如,在车厢内的状态是如图4c所示的状态的情况下,无论后座乘客34存在与否,检测范围决定部15为了不误检测为后座乘客34不存在,都将第一区域41、第二区域42、第三区域43、第四区域44、第五区域45以及第六区域46决定为雷达2a的检测范围51(参照图5c)。在后座32存在坐在儿童安全座椅上的婴幼儿35的情况下,后座乘客检测部142即
使将第一区域41、第二区域42、第三区域43和第四区域44为止作为雷达2a的检测范围51,也能检测出该婴幼儿35。但是,检测范围决定部15在不存在前座乘客33的情况下,将雷达2a的检测范围51设为尽可能大的范围。即,检测范围决定部15将第五区域45及第六区域46包含在雷达2a的检测范围51中。由此,后座乘客检测部142与雷达2a的检测范围51中不包含第五区域45及第六区域46的情况相比,能够更可靠地检测后座乘客34。具体而言,例如,在脚边有玩耍的婴幼儿35的情况下,或者在脚边有宠物(省略图示)的情况下,后座乘客检测部142也能够检测婴幼儿35或宠物(参照图5d)。即,检测范围决定部15在没有检测到前座乘客33的情况下,不会将前座乘客33误检测为后座乘客34,因此为了尽可能地扩大雷达2a的检测范围,将雷达2a的可检测范围2a设为雷达2a的检测范围。另外,检测范围决定部15从前座乘客检测部141获取意为没有检测到前座乘客33的信息。
54.检测范围决定部15也可以决定为没有雷达2a的检测范围。图6是表示实施方式1中检测范围决定部15决定为没有雷达2a的检测范围的情况下的车厢内的状态的一个示例的图。在图6中,将车厢内的状态设为前座乘客33使前座31的椅背向后座32大幅倾斜的状态。前座乘客33是大人。后座32不存在后座乘客34。例如,在车厢内的状态是如图6所示的状态的情况下,前座乘客33的位置大幅侵入雷达2a的可检测范围2a(第一区域41至第六区域46)。后座乘客检测部142很有可能将前座乘客33误检测为后座乘客34。
55.在前座乘客33的位置大幅侵入雷达2a的可检测范围2a的情况下,检测范围决定部15判断为不可能基于距离数据检测后座乘客34,并决定为没有雷达2a的检测范围。检测范围决定部15根据前座乘客33的位置是否位于车厢内的后座乘客不可检测区域内来判定前座乘客33的位置是否大幅侵入雷达2a的可检测范围2a。能适当设定后座乘客不可检测区域。后座乘客不可检测区域例如可以是雷达2a的可检测范围2a中的第二区域42的区域,也可以是车厢内预先决定的区域。
56.由此,检测范围决定部15基于由前座乘客位置推测部1411推测的前座乘客33的位置,来动态决定雷达2a的检测范围。检测范围决定部15将与所决定的雷达2a的检测范围有关的信息输出到后座乘客检测部142。当决定为没有雷达2a的检测范围时,检测范围决定部15向后座乘客检测部142和传感器控制部16输出内容为决定为没有雷达2a的检测范围的信息。
57.传感器控制部16在检测范围决定部15决定为没有雷达2a的检测范围的情况下,关闭雷达2a的电源。具体而言,例如,传感器控制部16向雷达2a发送用于断开雷达2a的电源的控制信号。
58.对实施方式1所涉及的车厢内检测装置10的动作进行说明。图7是用于对实施方式1所涉及的车厢内检测装置10的动作进行说明的流程图。
59.图像获取部11a从摄像头1a获取摄像头1a在车厢内拍摄的图像数据(步骤st701)。图像获取部11a将从摄像头1a获取的图像数据输出到乘客检测部14的前座乘客检测部141。
60.座位信息获取部13获取座位信息(步骤st702)。
座位信息获取部13将获取的座位信息输出到前座乘客检测部141。
61.前座乘客检测部141基于在步骤st701中图像获取部11a获取的图像数据,检测车辆30的前座乘客33(步骤st703)。前座乘客检测部141在没有检测到前座乘客33的情况下,将没有检测到前座乘客33的情况的信息输出到检测范围决定部15。然后,车厢内检测装置10的动作跳过步骤st704,前进到步骤st705。
62.当步骤st703中前座乘客检测部141检测到前座乘客33时,前座乘客位置推测部1411基于步骤st701中图像获取部11a获取的图像数据和步骤st702中座位信息获取部13获取的座位信息,推测前座乘客33的位置(步骤st704)。前座乘客位置推测部1411将推测出的与前座乘客33的位置有关的信息输出到检测范围决定部15。
63.检测范围决定部15基于步骤st704中前座乘客位置推测部1411推测的前座乘客33的位置,决定雷达2a的检测范围(步骤st705)。
64.检测范围决定部15将与所决定的雷达2a的检测范围有关的信息输出到后座乘客检测部142。当决定为没有雷达2a的检测范围时,检测范围决定部15向后座乘客检测部142和传感器控制部16输出内容为决定为没有雷达2的检测范围的信息。
65.距离获取部12a从雷达2a获取雷达2a对到车厢内各物体的距离进行测定而得的距离数据(步骤st706)。距离获取部12a将从雷达2a获取的距离数据输出到后座乘客检测部142。
66.后座乘客检测部142基于步骤st706中距离获取部12a获取的距离数据和步骤st705中检测范围决定部15决定的雷达2a的检测范围,检测车辆30的后座乘客34(步骤st707)。另外,后座乘客检测部142在检测范围决定部15决定为没有雷达2a的检测范围的情况下,不进行后座乘客34的检测。该情况下,传感器控制部16关闭雷达2a的电源。
67.关于图7的流程图所示的车厢内检测装置10的动作,并行地执行步骤st701至步骤st705的动作和步骤st706的动作。此外,在图7的流程图中,车厢内检测装置10按步骤st701、步骤st702的顺序进行动作,而车厢内检测装置10也可以按步骤st702、步骤st701的顺序进行动作。
68.由此,车厢内检测装置10基于根据图像数据推测出的前座乘客33的位置,决定雷达2a的检测范围。然后,车厢内检测装置10基于从雷达2a获取的距离数据和决定的雷达2a的检测范围来检测后座乘客34。车厢内检测装置10根据前座乘客33的位置动态地决定雷达2a的检测范围,因此能够在考虑前座乘客33的入座状态的情况下检测后座乘客34。
69.与车厢内检测装置10检测到的乘客有关的信息(以下称为“检测乘客信息”)由车厢内检测装置10所具备的输出部(省略图示)输出,用于各种功能。另外,检测乘客信息包含是否检测到乘客的信息、在检测到乘客的情况下检测到的乘客是前座乘客33还是后座乘客34的信息、或者检测到的乘客是大人还是不是大人(婴幼儿35或宠物)的信息等。另外,车厢内检测装置10如上所述,能够根据雷达2a的检测范围中的距离数据被分类到哪个分割区
域,来进行考虑了体格差异的乘客检测。车厢内检测装置10的输出部对外部装置(省略图示)输出检测乘客信息。例如,外部装置可以是搭载在车辆30上的扬声器或显示器中的至少一个,可以是乘坐在车辆30上的乘客或由车辆30的所有者持有的移动终端等,也可以是搭载在车辆30上的危险信号灯或喇叭(汽车喇叭)等。
70.例如,检测乘客信息用于车辆防盗功能。举具体例子,假设在车辆30停车的状态下,车辆30的控制部(省略图示)检测到对车辆30施加巨大冲击或在锁定状态下车门的开闭。该情况下,车厢内检测装置10启动摄像头1a和雷达2a,分别从摄像头1a和雷达2a获取图像数据和距离数据,进行存在于车厢内的人的检测。然后,车厢内检测装置10将检测乘客信息输出到车辆30的所有者所持有的移动终端。由此,车辆30的所有者例如能够检测到有人进入车辆30内。此外,例如,车厢内检测装置10将从摄像头1a获取的图像数据与检测乘客信息一起输出到安全系统。车厢内检测装置10与安全系统经由网络连接。在安全系统中,根据检测乘客信息以及摄像头1a来掌握车厢内的状况,远程控制车辆30,从而能够防止车辆30被盗。安全系统远程进行的车辆30的控制例如是使引擎不开启的控制。
71.此外,例如,在车辆30停车的状态下,车厢内检测装置10进行乘客检测的情况下,检测乘客信息用于幼儿遗忘检测功能。车厢内检测装置10将检测乘客信息输出到幼儿遗忘检测装置(省略图示)。车厢内检测装置10与幼儿遗忘检测装置经由网络连接。幼儿遗忘检测装置在从车厢内检测装置10例如输出了意为检测到幼儿35的检测乘客信息的情况下,判定为有可能发生了幼儿遗忘。此时,幼儿遗忘检测装置如果能够从检测乘客信息判定为除婴幼儿35以外还检测到大人,则判定为不是幼儿遗忘,例如判定为车辆拥有者(大人)有意地在车厢内休息或等待,则能够关闭遗忘警报。另外,车厢内检测装置10也可以将从摄像头1a获取的图像数据与检测乘客信息一起输出到幼儿遗忘检测装置,幼儿遗忘检测装置根据图像数据判定除婴幼儿35以外是否存在大人。
72.此外,例如,在车辆30行驶的状态下,车厢内检测装置10进行乘客检测的情况下,检测乘客信息用于安全带提醒功能。
73.图8a、图8b是示出实施方式1所涉及的车厢内检测装置10的硬件结构的一个示例的图。在实施方式1中,图像获取部11a、距离获取部12a、座位信息获取部13、乘客检测部14、检测范围决定部15、传感器控制部16的功能由处理电路801来实现。即,车厢内检测装置10包括用于进行检测车辆30的车厢内乘客的控制的处理电路801。处理电路801可以如图8a所示那样是专用硬件,也可以如图8b所示那样是执行存储于存储器806的程序的cpu(central processing unit:中央处理单元)805。
74.在处理电路801为专用的硬件的情况下,处理电路801例如相当于单一电路、复合电路、程序化的处理器、并联程序化的处理器、asic(application specific integrated circuit:专用集成电路)、fpga(field-programmable gate array:现场可编程门阵列)或它们的组合。
75.在处理电路801为cpu805的情况下,图像获取部11a、距离获取部12a、座位信息获取部13、乘客检测部14、检测范围决定部15和传感器控制部16的功能由软件、固件或软件和
固件的组合来实现。即,图像获取部11a、距离获取部12a、座位信息获取部13、乘客检测部14、检测范围决定部15、传感器控制部16由执行存储于hdd(hard disk drive:硬盘驱动器)802、存储器806等的程序的cpu805、系统lsi(large-scale integration:大规模集成化)等处理电路来实现。此外,存储在hdd802、存储器806等中的程序也可以说是使计算机执行图像获取部11a、距离获取部12a、座位信息获取部13、乘客检测部14、检测范围决定部15、传感器控制部16的步骤或方法的程序。这里,存储器806例如相当于ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、闪存、eprom(erasable programmable rom:可擦可编程只读存储器)、eeprom(electrically erasable programmable read-only memory:电可擦可编程只读存储器)等非易失性或易失性的半导体存储器、或者磁盘、软盘、光盘、压缩光盘、迷你光盘、dvd(digital versatile disc:数字通用光盘)等。
76.另外,对于图像获取部11a、距离获取部12a、座位信息获取部13、乘客检测部14、检测范围决定部15、传感器控制部16的功能,也可以用专用的硬件来实现一部分,用软件或固件来实现一部分。例如,对于图像获取部11a、距离获取部12a和座位信息获取部13,可利用作为专用的硬件的处理电路801来实现其功能,对于乘客检测部14、检测范围决定部15、传感器控制部16,可利用处理电路801读取储存于存储器806的程序并执行来实现其功能。此外,车厢内检测装置10具有输入接口装置803和输出接口装置804,用于与摄像头1a、雷达2a或者外部装置等装置进行有线通信或无线通信。
77.以上的实施方式1中,检测范围决定部15将雷达2a能够测定距离数据的可检测范围2a分割为多个分割区域(第一区域41、第二区域42、第三区域43、第四区域44、第五区域45以及第六区域46),用于判定所获取的距离数据是否能够用于后座乘客34的检测,通过改变该分割区域,动态地决定雷达2a的检测范围。但这只是一个示例。检测范围决定部15可以通过改变雷达2a发送毫米波的方向来动态地决定雷达2a的检测范围。此外,检测范围决定部15可以通过分割区域与雷达2a发送毫米波的方向的组合,来决定雷达2a的检测范围。
78.例如,以上的实施方式1中,在车厢内的状态是图4所示的状态的情况下,检测范围决定部15对将雷达2a的可检测范围2a(第一区域41至第六区域46)中的第一区域41及第二区域42作为雷达2a的检测范围的一个示例进行了说明(参照图5b)。例如,在车厢内的状态是如图4所示的状态的情况下,检测范围决定部分15可以将雷达2a发送毫米波的方向更朝向后座32侧,并在此基础上将不包含前排乘客33的位置的分割区域决定为雷达2a的检测范围。图9是用于说明当车厢内的状态是如图4所示的状态时,检测范围决定部15在将雷达2a发送毫米波的方向更朝向后座32侧的基础上,将不包含前座乘客33的位置的分割区域决定为雷达2a的检测范围的情况下的检测范围的图像的一个示例的图。图9中,检测范围决定部15使从雷达2a向可检测范围2a的大致中心处发送的毫米波向后座32的头枕处发送,并在此基础上将第一区域41、第二区域42、第三区域43、第四区域44和第五区域45设为雷达2a的检测范围。另外,检测范围决定部15经由传感器控制部16改变雷达2a发送毫米波的方向即可。
79.此外,在以上的实施方式1中,雷达2a设置在后座32上方(参照图2、图4至图6),但
这只是一个例子。雷达2a在车厢内设置在该车厢内所设置的座位上方即可。如果雷达2a设置在车厢内所设置的座位上方,则例如也可以设置在车柱上。另外,雷达2a优选设置得比车厢内所设置的座椅要靠上方、并且比后座32上方的位置更靠前座31一侧。这是因为,例如,当铁板嵌入后座32的靠背部分时,雷达2a发送的毫米波可能会因该铁板而无法穿透后座32。如果毫米波不透过,则在车厢内检测装置10中,无法检测后座32的后座乘客34。
80.这里,图10是用于说明雷达2a设置在后座32上方以外的场所时的雷达2a的设置位置的一个示例、以及检测范围决定部15决定的雷达2a的检测范围1001的一个示例的图。在图10中,雷达2a设置在前座31上方。另外,雷达2a设置在前座31处于标准位置时的该前座31上方的位置。图10a与图4a同样,示出了车厢内的状态,即,前座乘客33和后座乘客34分别坐在标准位置的前座31和标准位置的后座32。图10b与图4b同样,示出了车厢内的状态,即,前座乘客33将前座31的滑动位置向后座32侧大幅度偏移而落座,后座乘客34落座在后座32。
81.在车厢内的状态是图10a所示那样的状态的情况下,对检测范围决定部15决定的雷达2a的检测范围的一个示例进行说明。检测范围决定部15将雷达2a的可检测范围2a分割为多个区域。图10a中,检测范围决定部15将可检测范围2a分割为例如来自雷达2a的毫米波发送到相对于车辆30的行进方向的最后方侧的第一区域101、比第一区域101相对于车辆30的行进方向更靠前方侧(以下简称为“车辆30的前方侧”)的第二区域102、比第二区域102更靠车辆30的前方侧的第三区域103、比第三区域103更靠车辆30的前方侧的第四区域104、比第四区域104更靠车辆30的前方侧的第五区域105、比第五区域105更靠车辆30的前方侧的第六区域106、比第六区域106更靠车辆30的前方侧的第七区域107、以及比第七区域107更靠车辆30的前方侧的第八区域108。第一区域101至第八区域108分别是分割区域。在图示例中,第一区域101是包含后座32的头枕的区域。第二区域102及第三区域103是包含后座32的椅背的区域,将包含该椅背的区域划分为头枕侧的区域和后座32的座面侧的区域,将第二区域102设为头枕侧的区域,将第三区域103设为座面侧的区域。第四区域104是包含后座32的座面的区域。第五区域105是包含后座32的脚下的区域。第六区域106及第七区域107是包含前座31的区域,第八区域108是包含前座31的脚下的区域。由此,检测范围决定15也能沿着从雷达2a发送毫米波的方向划分可检测范围2a。另外,检测范围决定部15可以组合根据距雷达2a的设置位置的距离进行分割的方法(例如参照图4的第一区域41至第六区域46)和如图10a所示进行分割的方法,来将可检测范围2a分割为分割区域。
82.例如,在图10a所示的车厢内的状态的情况下,当第四区域104至第八区域108包含在雷达2a的检测范围中时,后座乘客检测部142基于第四区域104至第八区域108中分类的距离数据,将前座乘客33误检测为后座乘客34。因此,检测范围决定部15将第一区域101、第二区域102以及第三区域103决定为雷达2a的检测范围1001,以防止后座乘客检测部142将前座乘客33误检测为后座乘客34。
83.另一方面,车厢内的状态为如图10b所示的车厢内的状态的情况下,不仅是第四区
域104至第八区域108,第三区域103也包含在雷达2a的检测范围中时,后座乘客检测部142基于第三区域103至第八区域108中分类的距离数据,将前座乘客33误检测为后座乘客34。在图10b中,设为后座32存在后座乘客34,但即使在后座32不存在后座乘客34的情况下,后座乘客检测部142也检测前座乘客33作为后座乘客34。因此,检测范围决定部15将第一区域101和第二区域102决定为雷达2a的检测范围1001,以防止将前座乘客33误检测为后座乘客34。
84.另外,检测范围决定部15如图10a所示,能够根据从雷达2a发送毫米波的范围的宽度来分割可检测范围2a。由此,例如,如图6所示,在车厢内的状态是前座乘客33使前座31的椅背向后座32侧大幅倾斜的状态的情况下,检测范围决定部15能够根据毫米波的发送范围的宽度来分割可检测范围2a,并将沿着后座32的椅背的分割区域设为检测范围(参照图11)。由此,后座乘客检测部142在存在后座乘客34的情况下,能够检测该后座乘客34而不会将前座乘客33误检测为后座乘客34。但是,该情况下,后座乘客检测部142不能进行判定体格差的乘客检测。具体而言,后座乘客检测部142在存在后座乘客34的情况下,不能判别该后座乘客34是大人还是儿童或婴幼儿。
85.此外,在以上的实施方式1中,前座乘客位置推测部1411基于图像获取部11a获取的图像数据和座位信息获取部13获取的座位信息,推测前座乘客33的位置,但这只是一个例子。前座乘客位置推测部1411也可以不使用座位信息,仅从图像数据推测前座乘客33的位置。该情况下,车厢内检测装置10能够构成为包括座位信息获取部13。
86.此外,在以上的实施方式1中,车厢内检测装置10包括传感器控制部16,但是车厢内检测装置10不是必须要包括传感器控制部16。但是,车厢内检测装置10通过包括传感器控制部16,能够防止没有必要的雷达2a的动作。
87.此外,在以上的实施方式1中,前座乘客33的位置是指前座乘客33的头部位置,但这只是一个示例。前座乘客33的位置例如可以是前座乘客33的肩部位置,也可以是前座乘客33的手腕位置。
88.此外,在以上的实施方式1中,前座乘客检测部141根据图像获取部11a获取的图像数据检测前座乘客33,但这只是一个示例。例如,后座乘客检测部142也可以基于距离获取部12a获取的距离数据,在检测后座乘客34的同时检测前座乘客33。例如,当雷达2a设置在图10所示的位置时,后座乘客检测部142能够基于距离数据检测前座乘客33。
89.此外,在以上实施方式1中,第一传感器1是摄像头1a,但是第一传感器1也可以是雷达。
90.此外,在以上的实施方式1中,车厢内检测装置10作为搭载在车辆30上的车载装置,图像获取部11a、距离获取部12a、座位信息获取部13、乘客检测部14、检测范围决定部15以及传感器控制部16设置在车厢内检测装置10中。不仅限于此,图像获取部11a、距离获取部12a、座位信息获取部13、乘客检测部14、检测范围决定部15以及传感器控制部16中一部分可以搭载于车辆的车载装置中,其他部分设置在与该车载装置经由网络连接的服务器中,由车载装置和服务器构成车厢内检测系统。
91.如上所述,实施方式1所涉及的车厢内检测装置10包括:获取由第一传感器1所获取的第一数据的第一数据获取部11;获取由设置在车厢内座位上方的第二传感器2所获取
的第二数据的第二数据获取部12;基于第一数据获取部11获取的第一数据来推测前座乘33客的位置的前座乘客位置推测部1411;基于前座乘客位置推测部1411所推测的前座乘客33的位置来决定第二传感器2的检测范围的检测范围决定部15;以及基于第二数据获取部12获取的第二数据和检测范围决定部15决定的第二传感器2的检测范围来检测后座乘客34的后座乘客检测部142。因此,车厢内检测装置10能够在考虑前座乘客33的入座状态的情况下检测后座乘客34。
92.此外,在实施方式1所涉及的车厢内检测装置10中,检测范围决定部15在前座乘客位置推测部1411推测的前座乘客33的位置位于车厢内的后座乘客不可检测区域内的情况下,决定为没有第二传感器2的检测范围,在检测范围决定部15决定为没有第二传感器2的检测范围的情况下,构成为包括用于断开第二传感器2的电源的传感器控制部16。因此,车厢内检测装置10能够防止没有必要的雷达2a的动作。
93.另外,本公开可以在该公开的范围内对实施方式的任意结构要素进行变形,或省略实施方式的任意的结构要素。工业上的实用性
94.本公开所涉及的车厢室内检测装置考虑到存在于前座的乘客的入座状态来检测存在于后座的乘客,因此适合用于检测车厢内的乘客的车厢内检测装置。标号说明
95.1第一传感器,1a摄像头,1a可拍摄范围,2第二传感器,2a雷达,2a可检测范围,51、1001检测范围,10车厢内检测装置,11第一数据获取部,11a图像获取部,12第二数据获取部,12a距离获取部,13座位信息获取部,14乘客检测部,141前座乘客检测部,142后座乘客检测部,1411前座乘客位置推测部,15检测范围决定部,16传感器控制部,31前座,32后座,33前座乘客,34后座乘客,35婴幼儿,41、101第一区域,42、102第二区域,43、103第三区域,44、104第四区域,45、105第五区域,106第六区域,107第七区域,108第八区域,801处理电路,802hdd,803输入接口装置,804输出接口装置,805cpu,806存储器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1