一种基于A柱显示屏的障碍物探测方法及装置与流程
一种基于a柱显示屏的障碍物探测方法及装置
技术领域
1.本发明属于汽车技术领域,具体涉及一种基于a柱显示屏的障碍物探测方法及装置。
背景技术:
2.汽车a柱是指汽车左前方和右前方连接车顶和前舱的连接柱,在发动机舱和驾驶舱之间、左右后视镜的上方。每当汽车在转弯或者低速直行时驾驶员的视野都会被a柱部分遮挡,产生一个视野上的盲区,造成驾驶安全隐患。
技术实现要素:
3.本发明实施例所要解决的技术问题在于,汽车a柱使驾驶员驾车左转或右转时存在视角盲区而导致驾驶安全隐患。为解决上述技术问题,本发明提供一种基于a柱显示屏的障碍物探测方法,包括:
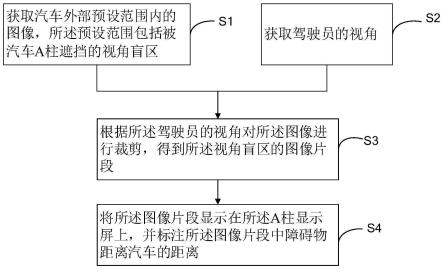
4.步骤s1,获取汽车外部预设范围内的图像,所述预设范围包括被汽车a柱遮挡的视角盲区;
5.步骤s2,获取驾驶员的视角;
6.步骤s3,根据所述驾驶员的视角,对所述图像进行裁剪,得到所述视角盲区的图像片段;
7.步骤s4,将所述图像片段显示在所述a柱显示屏上,并标注所述图像片段中障碍物距离汽车的距离。
8.进一步地,所述步骤s4还包括:
9.获取环境亮度;
10.根据所述环境亮度调整所述a柱显示屏的显示亮度。
11.进一步地,所述步骤s2具体包括:
12.步骤s21,获取主驾座椅的位置;
13.步骤s22,获取驾驶员的身高;
14.步骤s23,根据所述主驾座椅的位置以及驾驶员的身高,确定所述驾驶员的视角。
15.进一步地,所述主驾座椅的位置包括:主驾座椅的前后位置以及主驾座椅的靠背倾角。
16.进一步地,所述步骤s4之后还包括:
17.步骤s5,当障碍物距离汽车的距离小于等于预设的距离阈值时,发出提醒信息。
18.一种基于a柱显示屏的障碍物探测装置,包括控制器模组、设置在车身前侧的摄像头和检测雷达,以及设置在a柱上的a柱显示屏;
19.所述摄像头用于获取汽车外部预设范围内的图像,所述预设范围包括被汽车a柱遮挡的视角盲区;
20.所述控制器模组,用于获取驾驶员的视角,并根据所述驾驶员的视角对所述图像
进行裁剪,得到所述视角盲区的图像片段;
21.所述a柱显示屏,用于显示所述图像片段;
22.所述检测雷达,用于检测所述图像片段中障碍物距离汽车的距离;
23.所述控制器模组,还用于标注所述距离,并将标注显示在所述a柱显示屏上。
24.进一步地,所述的基于a柱显示屏的障碍物探测装置还包括光线传感器,用于获取环境亮度;
25.所述控制器模组,还用于根据所述环境亮度调整所述a柱显示屏的显示亮度。
26.进一步地,所述光线传感器设置在a柱上,并通过车内can网络与所述控制器模组连接。
27.进一步地,所述摄像头、所述a柱显示屏和所述检测雷达均设置有2个,分别设置在车的左右侧,与左右两个a柱对应设置。
28.进一步地,所述控制器模组包括:
29.主驾座椅位置获取单元,用于获取主驾座椅的位置;
30.驾驶员身高获取单元,用于响应驾驶员的输入操作,获取驾驶员的身高;
31.视角确定单元,用于根据所述主驾座椅的位置以及驾驶员的身高,确定所述驾驶员的视角。
32.进一步地,所述主驾座椅的位置包括:主驾座椅的前后位置以及主驾座椅的靠背倾角。
33.进一步地,所述的基于a柱显示屏的障碍物探测装置还包括提醒单元,用于当障碍物距离汽车的距离小于等于预设的距离阈值时,发出提醒信息。
34.进一步地,所述控制器模组通过hdmi线或lvds线与所述a柱显示屏连接,通过usb线分别与所述摄像头、所述检测雷达连接。
35.进一步地,所述检测雷达设置在汽车前舱大灯上方。
36.实施本发明实施例,具有如下有益效果:通过a柱上的显示屏对驾驶员的视角盲区中的实景进行显示,使驾驶员左转或右转时能够看到车前完整的路况,并且实时检测视角盲区中障碍物距离车的距离,并将该距离标注在显示屏中,使驾驶员能够准确了解障碍物距离车的距离,避免因误判距离而导致意外事故,确保驾驶安全。
附图说明
37.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
38.图1为本发明实施例一一种基于a柱显示屏的障碍物探测方法的流程示意图。
39.图2为实施本发明实施例一所获得的效果图。
40.图3为本发明实施例二一种基于a柱显示屏的障碍物探测装置的功能模块图。
具体实施方式
41.以下各实施例的说明是参考附图,用以示例本发明可以用以实施的特定实施例。
42.请参照图1所示,本发明实施例一提供一种基于a柱显示屏的障碍物探测方法,包括步骤s1-s4:
43.步骤s1,获取汽车外部预设范围内的图像,所述预设范围包括被汽车a柱遮挡的视角盲区。
44.具体地,可以在汽车前方安装摄像头对前方路况进行实时拍摄,拍摄的区域包括a柱遮挡的视角盲区,该视角盲区是以驾驶员的观察视角为参考,具体可根据座椅的极限位置以及驾驶员眼睛高度的极限值进行计算并预先进行设置。由于a柱有左右两个,摄像头也可对应设置两个,分别获取左右两个a柱遮挡的视角盲区的图像。
45.步骤s2,获取驾驶员的视角。
46.具体的,驾驶员的视角可以通过面部识别技术进行确定。例如在驾驶员前方(比如a柱或车顶靠近挡风玻璃的地方)设置摄像头,实时识别驾驶员的眼球位置,根据眼球位置以及a柱位置确定驾驶员的视角。该方法虽然能够准确获取驾驶员的视角,但是计算量较大。
47.本发明实施例提供了一种较为简单的驾驶员的视角确定方法,具体包括步骤s21-s23:
48.步骤s21,获取主驾座椅的位置。
49.主驾座椅的位置都是可以根据驾驶员的身材进行调整的,例如驾驶员根据自身胖瘦进行前后位置调整,以及根据驾驶习惯可以对靠背的倾角进行调整。将座椅位置可以调节的行程划分为若干挡位,比如5挡,同时靠背的倾角也可以划分为不同挡位,在驾驶员调整完座椅前后位置的挡位以及靠背倾角的挡位后,控制器模组自动接收到挡位信号,从而获取到主驾座椅的位置。
50.步骤s22,获取驾驶员的身高。
51.具体可以在驾驶员上车后,系统提示驾驶员输入身高参数,也可以是驾驶员事先在系统中进行了注册,注册信息包含了身高信息,驾驶时进行验证身份后直接获取对应的身高数据。
52.步骤s23,根据所述主驾座椅的位置以及驾驶员的身高,确定所述驾驶员的视角。
53.具体地,在获取到主驾座椅的位置以及驾驶员的身高后,可以大致确定出人眼的位置,然后根据人眼的位置计算相对a柱方向的观察视角,从而可以确定出该位置对应的视角盲区。在应用过程中,可以根据不同的主驾座椅的档位和身高参数确定相应的视角盲区,并将这种对应关系存储在硬盘中,通过主驾座椅的档位和身高参数直接匹配视角盲区。本方法精度虽然有所欠缺,但是基本能满足驾驶需求。本方法相比实时捕获眼球去计算观察视角进而计算视角盲区,计算量少,对系统配置要求低,方案更具有可行性和推广价值。
54.步骤s3,根据所述驾驶员的视角对所述图像进行裁剪,得到所述视角盲区的图像片段。
55.步骤s4,将所述图像片段显示在所述a柱显示屏上,并标注所述图像片段中障碍物距离汽车的距离。
56.具体地,根据驾驶员的观察视角,从而可以确定出被a柱遮挡的视角盲区。然后将获取的图片进行裁剪,保留位于视角盲区中的图像片段,该图像片段之外所对应的实景可以由眼睛直接观察到,视角盲区中的实景通过裁剪的图像片段显示在a柱显示屏上,此时a
柱相当于是透明的,驾驶员可以观察到车前方整个区域。当视角盲区内有障碍物包括动物/人经过时,检测雷达(可以设置在车大灯附近)实时检测障碍物距离汽车的距离,并将该距离标注在a柱显示屏中,实时距离的测量可以参照现有的倒车雷达,效果图见图2。可选地,当障碍物距离汽车的距离小于等于预设的距离阈值时,发出提醒信息,可以是报警警示或者语音提醒。
57.本发明通过a柱上的显示屏对驾驶员的视角盲区中的实景进行显示,使驾驶员在左转或右转时能够看到车前完整的路况,并且实时检测视角盲区中障碍物距离车的距离,并将该距离标注在显示屏中,使驾驶员能够准确了解障碍物距离车的距离,避免因误判距离而导致意外事故,确保驾驶安全。
58.进一步地,本发明实施例还可以在车外设置光线传感器来检测环境亮度,具体可以将检测的光线强度分为1-20级,同时将显示屏的亮度也设置为相对应的1-20级。初始默认亮度等级为10级,当检测到外界环境亮度为11级时,系统调整显示屏的亮度变为11级,与环境亮度等级匹配。本调节方法使显示屏的亮度实时与外界环境亮度匹配,从而可以使驾驶员清晰的观看a柱盲区信息。
59.相应于本发明实施例一提供的基于a柱显示屏的障碍物探测方法,本发明实施例二还提供一种基于a柱显示屏的障碍物探测装置,如图3所示,包括:控制器模组1、设置在车身前侧的摄像头2和检测雷达3,以及设置在a柱上的a柱显示屏4;
60.所述摄像头2用于获取汽车外部预设范围内的图像,所述预设范围包括被汽车a柱遮挡的视角盲区;
61.所述控制器模组1,用于获取驾驶员的视角,并根据所述驾驶员的视角对所述图像进行裁剪,得到所述视角盲区的图像片段;
62.所述a柱显示屏4,用于显示所述图像片段;
63.所述检测雷达3,用于检测所述图像片段中障碍物距离汽车的距离;
64.所述控制器模组1,还用于标注所述距离,并将标注显示在所述a柱显示屏4上。
65.进一步地,所述障碍物探测装置还包括光线传感器5,用于获取环境亮度;
66.所述控制器模组1,还用于根据所述环境亮度调整所述a柱显示屏4的显示亮度。
67.具体地,控制器模组1通过hdmi线或lvds线与a柱显示屏4连接,通过usb线分别与摄像头2、检测雷达3连接,通过车内can网络与光线传感器5连接,光线传感器可以设置在a柱上,检测雷达3可以设置在汽车前舱大灯上方。控制器模组1接收摄像头2发送的图像,并按照驾驶员的视角对图像进行裁剪,得到被a柱阻挡的视角盲区的图像片段,并将图像片段发送至a柱显示屏进行显示。此外,检测雷达3检测图像片段中障碍物距离车的距离并发送给控制器模组1,控制器模组1在图像中进行标注并发送至a柱显示屏进行显示。
68.进一步地,摄像头2、检测雷达3和a柱显示屏4均可以设置2个,分别设置在车的左右侧,与左右两个a柱对应设置。
69.进一步地,所述控制器模组1包括:
70.主驾座椅位置获取单元11,用于获取主驾座椅的位置;
71.驾驶员身高获取单元12,用于响应驾驶员的输入操作,获取驾驶员的身高;
72.视角确定单元13,用于根据所述主驾座椅的位置以及驾驶员的身高,确定所述驾驶员的视角。
73.进一步地,所述主驾座椅的位置包括:主驾座椅的前后位置以及主驾座椅的靠背倾角。
74.进一步地,所述障碍物探测装置,还包括提醒单元6,用于当障碍物距离汽车的距离小于等于预设的距离阈值时,发出提醒信息。
75.有关本实施例基于a柱显示屏的障碍物探测装置的工作原理和过程,参见前述本发明实施例一的说明,此处不再赘述。
76.通过上述说明可知,与现有技术相比,本发明的有益效果在于:通过a柱上的显示屏对驾驶员的视角盲区中的实景进行显示,使驾驶员左转或右转时能够看到车前完整的路况,并且实时检测视角盲区中障碍物距离车的距离,并将该距离标注在显示屏中,使驾驶员能够准确了解障碍物距离车的距离,避免因误判距离而导致意外事故,确保驾驶安全;并且本发明还可以设置光线传感器来检测环境亮度,调节显示屏的亮度使显示屏的亮度实时与外界环境亮度匹配,从而可以使驾驶员清晰的观看a柱盲区信息。
77.以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1