自适应停车方法及自适应调速装置与流程
本发明涉及自动控制,尤其涉及一种自适应停车方法及自适应调速装置。
背景技术:
1、矿用卡车在矿区运行的路况比较复杂,尤其是在矿区排土点处的路况更为特殊复杂,矿区设计的排土线路面为大上坡路面,并且在排土点处可能有小凸包、小凹坑、碎石块、小石块等情况,会造成坡道有起伏,在排土点倒车过程中压到碎石块或者小石块时会增大车辆的运行阻力。由于在排土点倒车过程中车辆运行速度较低(一般为10km/h以下),且无法预知未来路况信息提前动作以施加车辆的实际牵引/制动力,如果在排土点遇到特殊复杂的路况速度减小较快为零时,牵引力发挥不及时(车辆执行机构在制动工况转牵引工况有一定的延时)会出现溜车现象;如果在接近排土点轨迹终点处为了克服特殊路况产生的阻力而增大了过大的油门开度,有冲撞排土点挡墙的风险。
2、现有的用于矿用卡车的停车方法一般通过设置pi参数(pi,即proportionintegral,比例积分参数)来控制车辆的倒车,然而当路面出现小凸包或小凹坑或碎石块或小石块时,则需要多次调试pi参数进行控制,大大增加了工作量并且延长了工作时间。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种自适应停车方法及自适应调速装置,以实现矿用卡车在路况复杂时的精准停车,避免溜车以及冲撞排土点挡墙的现象的发生。
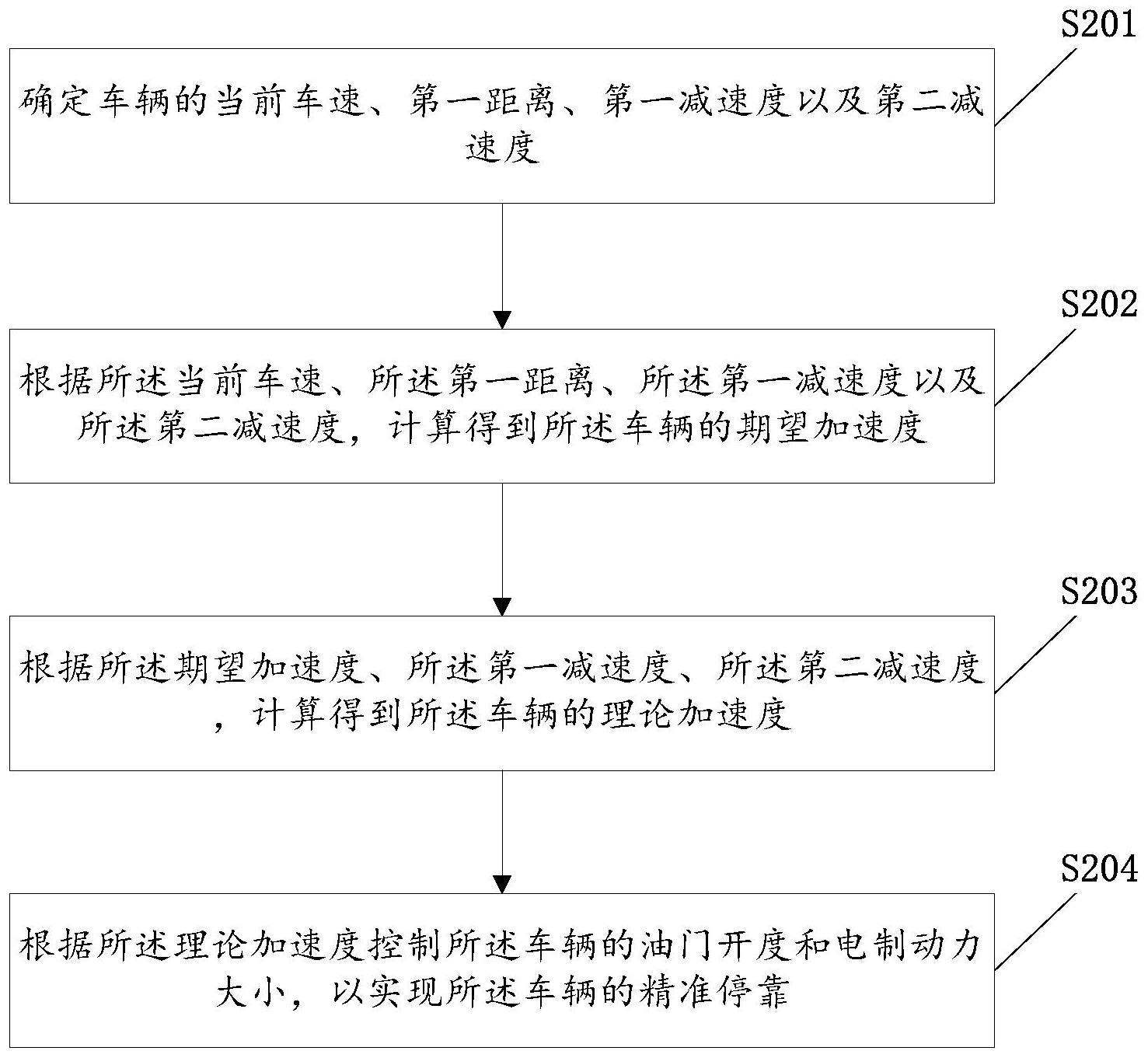
2、基于上述目的,本发明提供了一种自适应停车方法,包括:
3、确定车辆的当前车速、第一距离、第一减速度以及第二减速度;
4、根据所述当前车速以及所述第一距离,计算得到所述车辆的期望加速度;
5、根据所述期望加速度、所述第一减速度、所述第二减速度,计算得到所述车辆的理论加速度;
6、根据所述理论加速度控制所述车辆的油门开度和电制动力大小,以实现所述车辆的精准停靠。
7、可选的,确定车辆的第一距离,包括:
8、获取所述车辆的减速起点、停车点以及终点;
9、根据所述减速起点、所述停车点以及所述终点,得到所述停车点到所述终点的距离以及所述减速起点到所述终点的距离;其中,所述减速起点到所述终点的距离为第二距离,所述停车点到所述终点的距离为第三距离;
10、对所述第二距离和所述第三距离进行求差运算,得到所述第一距离;确定车辆的第一减速度,包括:
11、获取车辆质量、路面坡度以及滚动阻力系数;
12、根据所述车辆质量、所述坡道角度以及所述滚动阻力系数进行计算,得到滚动阻力;
13、根据所述滚动阻力进行计算,得到所述滚动阻力产生的减速度;其中,滚动阻力产生的减速度为所述第一减速度;
14、确定车辆的第二减速度,包括:
15、获取车辆质量和路面坡度;
16、根据所述车辆质量和所述路面坡度进行计算,得到坡道阻力;
17、根据所述坡道阻力,得到所述坡道阻力产生的减速度;其中,所述坡道阻力产生的减速度为所述第二减速度。
18、可选的,所述根据所述当前车速以及所述第一距离,计算得到所述车辆的期望加速度,包括:
19、通过如下所示公式进行所述期望加速度的计算:
20、
21、其中,vstop(t)为当前速度,sstop(t)为第二距离,ssafe为第三距离。
22、可选的,所述根据所述期望加速度、所述第一减速度以及所述第二减速度,计算得到所述车辆的理论加速度,包括:
23、根据所述理论加速度进行计算,得到发动机产生的所述理论加速度,包括:
24、
25、其中,为车辆期望加速度,aroll(t)为滚动阻力产生的减速度,aslope(t)为坡道阻力产生的减速度。
26、可选的,所述根据所述理论加速度控制所述车辆的油门开度和电制动力,包括:
27、响应于所述理论加速度aengine(t)大于0,则增加所述车辆的油门开度以对所述车辆进行加速,以使所述油门开度符合预期油门开度;
28、响应于所述理论加速度aengine(t)小于0,则增加所述车辆的电制动力以对所述车辆进行减速;
29、响应于所述理论加速度aengine(t)等于0,则不对所述车辆进行增加油门开度或者施加电制动力的控制。
30、可选的,所述响应于所述理论加速度aengine(t)大于0,则增加油门开度进行调速,以符合预期油门开度,包括:
31、对车辆当前的负载情况进行判断:
32、响应于车辆为空载时,获取最大油门开度可以产生的加速度;
33、根据所述最大油门开度可以产生的加速度进行计算,得到空载时的预期油门开度;
34、根据所述空载时的预期油门开度对当前油门开度进行调整;
35、响应于车辆为重载时,获取车辆的当前质量;
36、根据所述当前质量和所述空载时的预期油门开度进行计算,得到重载时预期油门开度;
37、根据所述重载时预期油门开度对当前油门开度进行调整。
38、可选的,所述响应于所述理论加速度aengine(t)小于0,则通过增加电制动力进行调速,包括:
39、对车辆当前的负载情况进行判断;
40、响应于车辆为空载时,获取最大电制动力可以产生的减速度;
41、根据所述最大电制动力可以产生的减速度,得到空载时的预期电制动力;
42、根据所述空载时的预期电制动力施加电制动力,以对电制动力进行调整;
43、响应于车辆为重载时,获取车辆的当前质量和空载时的最大电制动力进行计算,得到重载时的预期电制动力;
44、根据所述预期电制动力施加电制动力以实现对当前电制动力的调整。
45、可选的,还包括:在车辆行驶时获取车辆的实时位置;
46、根据所述实时位置计算车辆到终点的距离;
47、响应于车辆到终点的距离小于预设距离时,获取车辆当前的速度和加速度,并根据所述速度和所述加速度对油门和电制动力的大小进行调节。
48、可选的,所述根据所述速度和所述加速度对油门开度进行调节,包括:
49、当所述速度和所述加速度小于预设参数时,对油门开度的大小进行补偿;
50、当所述车速v(t)≤vlow时,设置车辆工况为牵引工况,并对油门开度进行补偿;其中,vlow>0为低速度临界值;
51、当所述加速度a(t)≥alow时,减小补偿的油门开度;其中,alow>0为减小补偿油门开度加速度临界值;
52、当所述速度和所述加速度大于预设参数,则对电制动力进行补偿;
53、当所述车速v(t)>=vhigh时,设置车辆工况为制动工况;其中,vhigh>0为高速度临界值;
54、当所述加速度a(t)>=ahigh时,设置车辆工况为制动工况;其中,ahigh>0为高加速度临界值。
55、基于同一发明构思,本发明一个或多个实施例还提供了一种自适应调速装置,其中包括:
56、确定模块,被配置为确定车辆的当前车速、第一距离、第一减速度、第二减速度;
57、第一计算模块,被配置为根据所述当前车速以及所述第一距离,计算得到所述车辆的期望加速度;
58、第二计算模块,被配置为根据所述期望加速度、所述第一减速度、所述第二减速度,计算得到所述车辆的理论加速度;
59、控制模块,被配置为根据所述理论加速度控制所述车辆的油门开度和电制动力大小,以实现所述车辆的精准停靠。
60、从上面所述可以看出,本发明提供的自适应停车方法及装置,包括:确定车辆的当前速度、第一距离、第一减速度、第二减速度,根据当前车速以及第一距离,计算得到车辆的期望加速度;然后根据期望加速度、第一减速度、第二减速度,计算得到车辆的理论加速度;然后根据理论加速度控制车辆的油门开度和电制动力大小,以对车辆进行精准控制,使得在倒车过程中的车速平稳,并且有效避免了车辆在靠近排土点时因速度过低出现溜车现象或者因速度过高出现急刹车或者及时刹车还不能将速度降低到0而冲撞挡墙的现象,实现了车辆的精准、安全停靠。
- 还没有人留言评论。精彩留言会获得点赞!