具有ESC容错的制动系统的车辆系统的制作方法
具有esc容错的制动系统的车辆系统
技术领域
1.本发明涉及一种根据权利要求1的前序部分的用于车辆的、尤其是商用车辆的车辆系统。
2.尤其地,这样的车辆系统具有能电子控制的气动制动系统和能电子控制的转向装置,其中,能电子控制的气动制动系统具有至少一个第一制动回路、至少一个第二制动回路、用于控制第一和第二制动回路的中央控制单元以及用于至少一个前桥上的至少是第一和第二前车轮的至少是第一和第二前桥制动执行器和用于至少一个后桥上的至少是第一和第二后车轮的至少是第一和第二后桥制动执行器。中央控制单元还具有电子稳定调节部或者与该电子稳定调节部连接,电子稳定调节部被构造成用于因车轮而异地操纵第一和第二前桥制动执行器和/或第一和第二后桥制动执行器。此外,能电子控制的气动制动系统还包括冗余控制单元,冗余控制单元在车辆行驶期间在电子稳定调节部失效的情况下控制第一制动回路和/或第二制动回路。本发明还涉及一种用于使车辆的、尤其是商用车辆减速和转向的方法,车辆尤其具有开头所述类型的车辆系统,以及涉及一种车辆、尤其是商用车辆,车辆具有开头所述类型的车辆系统。
背景技术:
3.在商用车辆中,通常使用气动制动系统,其具有两个或更多个制动回路。例如,为前桥设置有第一制动回路,并为后桥设置有第二制动回路。替选地也能想到的是,为车辆左侧设置有第一制动回路,并为车辆右侧设置有第二制动回路。交叉接法也可以是优选的。此外,能电子控制的气动制动系统还可以具有第三制动回路,其例如被设置用于驻车制动装置和/或供应挂车。
4.在车辆、尤其是sae 3、4或5级的车辆日益自动化的范围内,有必要使这种制动系统即使在发生故障的情况下,即当一个或多个模块、电控制单元或其他部件失效的时,也可以安全制动。所已知的针对所谓fobs(fail operational brake systems(故障运行制动系统))的解决方案主要是针对在单一故障情况下的剩余可用性,以便将车辆转移到安全状态下。所造成的剩余性能在此往往严重下降。电子稳定调节通常不再得到保证。
5.例如,已知有如下这样的系统,这些系统在中央控制单元出现故障的情况下将控制转移给另外的模块的电子控制单元,如前桥调制器或后桥调制器的电子控制单元。还存在一些系统,其中,驻车制动模块的电子控制单元在中央模块中出现故障时接管对制动系统的控制。此外,还有一些系统,这些系统通过如下方式构建了纯粹的气动冗余,即,将一个车桥的压力转移给另一个车桥,以便以该方式能够至少以气动方式调控出冗余的压力。
6.其他方案使用完全平行构建的系统。在这些系统中,平行构建有两个制动系统,并且例如经由梭阀作用到各个制动执行器上。尽管这些系统是全面的并且能够重现主要的制动系统的大部分功能,但它们需要高的装配和布线耗费,并因此是成本高昂。
技术实现要素:
7.本发明的任务是提供一种具有高剩余可用性的制动系统,该制动系统即使在发生故障的情况下也可以施加稳定功能。
8.本发明在开头所述类型的车辆系统中通过如下方式来解决该任务,即,在车辆行驶期间在电子稳定调节部失效的情况下,冗余控制单元按车桥地至少以前桥冗余制动压力驱控前桥和/或以后桥冗余制动压力驱控后桥,并且能电子控制的转向装置实施横向稳定的转向干预,以用于使车辆保持在车辆的预定的目标轨迹的公差廊带内。
9.本发明基于以下思路,即,通过如下方式提供一种容错的制动系统,即,在后备等级中,当主要系统的电子稳定调节部不再可用时,经由按车桥地对至少一个车桥进行压力驱控和经由自动化的转向部所进行的叠加的转向干预的组合来实施横向稳定的调节干预。第一制动回路优选被设置用于前桥,并与第一和第二前桥制动执行器连接,以便为它们供应制动压力。第二制动回路优选被设置用于后桥,并相应地与第一和第二后桥制动执行器连接,以便为它们供应制动压力。然而应理解,其他配置也是可能的,例如,第一制动回路也可以被设置用于左前车轮上的第一制动执行器和右后车轮上的第二制动执行器,而第二制动回路被设置用于右前车轮上的第二制动执行器和左后车轮上的第一制动执行器。第一和第二制动回路都由中央控制单元来控制,中央控制单元本身可以从更高级别的单元,例如尤其是用于自主驾驶的单元接收制动指令。中央控制单元具有电子稳定调节部,其能够实现在特定的制动状况下因车轮而异地进行制动。这意味着,第一和第二前桥制动执行器以及第一和第二后桥制动执行器被输送不同的制动压力,以便因此可以因车轮而异地进行制动,以确保车辆的稳定。
10.在该电子稳定调节部失效的情况下,例如这是因为中央控制单元失效,这是因为一个或多个车轮上的车轮转速传感器失效,或者另外因为存在不利地影响电子稳定调节部的故障,冗余控制单元将接管对制动系统的控制,尤其是对第一和第二制动回路的控制。在冗余控制单元接管控制的情况下,冗余控制单元按车桥地驱控其中至少一个车桥,即前桥和/或后桥。这意味着,在被按车桥地驱控的至少一个车桥上,给相应的制动执行器提供相同的制动压力。例如,如果按车桥地只驱控前桥,则与可能的不同的车轮转速无关地,冗余控制单元就促使给第一前桥制动执行器和第二前桥制动执行器上调控出相同的制动压力。同样,也可以按车桥地驱控后桥,使得给第一和第二后桥制动执行器调控出相同的制动压力。在按车桥地驱控的情况下,相应调控出前桥冗余制动压力或后桥冗余制动压力。如果车辆还应具有第二前桥,则也可以按车桥地驱控该第二前桥,第二后桥、附加车桥等也是如此。例如,如果车辆具有五个车桥,则优选设置有总共十个制动执行器,其中,每个车桥可以按车桥地被单独驱控,或将对车桥的驱控合并成对一个或多个车桥组的驱控。然而,在本发明的范围内,也可以设置的是,只有一个车桥被按车桥地驱控,而针对其他车桥例如借助冗余的车轮转速传感器和至少部分冗余电子稳定调节部仍然能够实现因车轮而异的制动。然而,在本发明的范围内,按车桥地驱控至少一个车桥。为了仍确保车辆稳定,能电子控制的转向装置为此促使实施横向稳定的转向干预,以便因此使车辆保持在车辆的预定的目标轨迹的公差廊带内。因此,经由能电子控制的转向装置通过相应的转向干预来补偿在按车桥地驱控的车桥上的不再是因车轮而异的制动。以该方式,即使当主要系统的电子稳定调节部失效时,以该方式和方法仍能够总是在制动系统中实现稳定功能。
11.目标轨迹以及针对目标轨迹的公差廊带优选例如经由车辆总线由用于自主驾驶的单元来提供。目标轨迹以及针对目标轨迹的公差廊带可以提供给中央控制单元、冗余的控制单原和/或能电子控制的转向装置或通过能电子控制的转向装置来提供。优选地,所有三个模块都接收目标轨迹以及公差廊带。当主要系统的电子稳定调节部失效时,能电子控制的转向装置实施横向稳定的转向干预。也可以设置的是,在主要系统的电子稳定调节部发挥作用期间,能电子控制的转向装置也被附加使用,以便实现进一步的功能性。
12.在第一优选的实施方式中,能电子控制的转向装置接收方向盘角度和/或转向力矩作为针对横向稳定的转向干预的目标值,并且调节输出横向稳定的转向干预。为此优选地,能电子控制的转向装置与能电子控制的气动制动系统连接,优选与冗余控制单元、电子稳定调节部或冗余电子稳定调节部和/或用于自主驾驶的单元连接,并被构造成用于接收方向盘角度和/或转向力矩作为目标值。然后,能电子控制的转向装置优选还被设立成用于对其进行处理,并与横向稳定的转向干预相协调地调节。该目标值优选由能电子控制的气动制动系统提供,优选由冗余控制单元、电子稳定调节部或冗余电子稳定调节部提供。
13.优选地,能电子控制的转向装置与中央控制单元连接,以用于接收电子稳定调节部的esc信号或接收从该esc信号推导出的或提取的信号。这种经推导出的或经整理的信号尤其可以是附加转向信号(例如,方向盘角度和/或转向力矩)。优选地,能电子控制的转向装置也与冗余控制单元连接,以便从该冗余控制单元必要时接收冗余的esc信号或其他信号,或者以便将接收到的esc信号或由该esc信号推导出或经整理的信号提供给冗余控制单元。
14.此外优选的是,车辆系统具有冗余电子稳定调节部,冗余电子稳定调节部与冗余控制单元连接并给冗余控制单元提供冗余的esc信号。优选地,冗余控制单元具有冗余电子稳定调节部。一方面,冗余的esc信号可以被用来逐个车轮地驱控那些没有被按车桥地驱控的车桥。另一方面,冗余的esc信号也可以被用于借助能电子控制的转向装置来调节出横向稳定的转向干预。为此目的,能电子控制的转向装置可以被构造成在调节出横向稳定的转向干预时考虑到冗余的esc信号。
15.因此,能电子控制的转向装置优选与冗余控制单元或冗余电子稳定调节部连接,以便接收冗余的esc信号。
16.此外优选的是,中央控制单元与第一电压源连接,并且冗余控制单元与第二电压源连接,第二电压源与第一电压源无关。根据该方面,中央控制单元和冗余控制单元由两个单独的、分开的和不相关的电压源来供电。例如,如果中央控制单元的电子稳定调节部因中央控制单元的第一电压源故障而失效,根据该方面就确保了冗余控制单元仍然被供应电压。由此提高了车辆系统的故障安全性。
17.优选地,能电子控制的转向装置或其一部分与第二电压源连接。优选地,能电子控制的转向装置也与第一电压源连接。这意味着,能电子控制的转向装置不仅由第一电压源供电而且由第二电压源供电。因此有可能的是,即使当第一电压源失效时,能电子控制的转向装置也继续用第二电压源工作,以便因此调节出横向稳定的转向干预。
18.根据另外的优选实施方式,冗余控制单元与第一和/或第二车轮转速传感器连接,以用于接收车轮转速信号。优选地,在前桥上布置有第一车轮转速传感器,并且在后桥上布置有第二车轮转速传感器。尤其地,在前桥的每个前车轮上分别布置有车轮传感器,即第一
和第二前桥车轮转速传感器。在后桥上优选在每个后车轮上分别布置有车轮转速传感器,即第一和第二后桥车轮转速传感器。这些车轮转速传感器分别提供车轮转速信号优选给冗余控制单元。第一和第二车轮转速传感器优选也提供车轮转速信号给中央控制单元,以及必要时也提供给另外的模块,例如尤其是提供给用于自主驾驶的单元。优选也能想到的是,经由车辆总线提供这些信号。
19.优选地,车辆系统还具有:驻车制动回路,其具有与中央控制单元连接的驻车制动模块;以及具有至少是在后桥或另外的后桥上的至少是第一和第二弹簧储能式执行器,其中,冗余控制单元形成驻车制动模块的电子控制单元或与之集成。驻车制动模块优选与第三压缩空气储备器连接,并且是第三制动回路的一部分。弹簧储能式执行器优选与第一和第二后桥制动执行器集成,以便形成所谓的tristop型制动执行器。根据该方面,冗余控制单元优选与驻车制动模块的电子控制单元集成或者是同一的。驻车制动模块优选被构造成用于在中央控制单元不工作或工作不正常时,在冗余的情况下接管对制动系统的控制。因此,驻车制动模块优选也与用于自主驾驶的单元以及中央控制单元连接,并接收相同的信号。
20.在另外的优选实施方式中设置的是,在电子稳定调节部失效的情况下,在按车桥地调控出前桥冗余制动压力时,冗余控制单元将该前桥冗余制动压力提供给第一和第二前桥制动执行器,以便因此按车桥地制动前桥。同样的情况优选也适用于后桥。因此,优选设置的是,在电子稳定调节部失效的情况下,在按车桥地调控出后桥冗余制动压力时,冗余控制单元将该后桥冗余制动压力提供给第一和第二后桥制动执行器,以便因此按车桥地制动后桥。
21.在第二方面中,本发明通过一种用于使开头所述类型的车辆减速和转向的方法来解决开头所述的任务,方法具有的步骤是:获知能电子控制的气动制动系统的电子稳定调节部的失效;对获知失效做出响应:借助能电子控制的气动制动系统的冗余控制单元,向至少一个前桥冗余地调控出冗余前桥制动压力,和/或向至少一个后桥冗余地调控出冗余后桥制动压力,并通过能电子控制的转向装置实施横向稳定的转向干预,以使车辆保持在车辆的预定的目标轨迹的公差廊带内。
22.冗余后桥制动压力可以由驻车制动模块以及其他模块,如后桥调制器来调控出。冗余后桥制动压力可以提供给后桥上的弹簧储能式制动缸和行车制动缸。在此,所有的组合都是能想到的并是优选的。
23.应理解,根据本发明的第一方面的车辆系统以及根据本发明的第二方面的方法具有相同和类似的子方面,这些尤其是记录在从属权利要求中。在这方面,对于根据本发明的第二方面的方法的优选的实施方式也全面参考对根据本发明的第一方面的车辆系统的上面描述。
24.优选地,方法进还包括的步骤是:获知前桥上的前桥转向力;获知后桥上的后桥转向力;其中,冗余控制单元提高向前桥和后桥中的那个在其上获知了前桥转向力和后桥转向力中较高者的车桥的制动压力调控。转向力例如可以从车辆模型获知。转向力是动态参量,其与侧偏角、车轮载荷、滑移、车轮外倾角和摩擦值有关。转向力是车辆模型的输出参量,其在不同的动态的传感器数据(如横向和纵向加速度、偏航率、转向角、车轮转速、车辆速度等)和静态参量(如车辆质量、重心、轮距、车辆几何形状等)的基础上描述了动态的车
辆状态。根据其中哪个车桥上存在更高的转向力而定地,提高调控出的制动压力或重新分配向车桥的制动压力,以偏向于具有较高转向力的车桥。这意味着,例如当前桥上的转向力高于后桥上的转向力时,冗余控制单元将提高前桥冗余制动压力。
25.在另外的优选的实施方式中,方法包括的步骤是:获知车辆的转向过度;并且作为响应:提高向前桥且可选地还向挂车的冗余前桥制动压力的制动压力调控;并且借助能电子控制的转向装置向弯道外侧方向转向。由此,使得即使当按车桥地只向前桥调控出前桥冗余制动压力时,也可以减低转向过度并使车辆稳定地保持在路径中。借助能电子控制的转向装置向弯道外侧方向转向,于是形成了在本发明意义下的横向稳定的转向干预。附加地或替选地,可以将对挂车的制动用来实现区段制动(streckbremsung)。
26.此外,方法优选包括的步骤是:获知车辆的转向不足;并且作为响应:提高向后桥且可选地还向挂车的冗余后桥制动压力的制动压力调控。在该实施方式中,不需要能电子控制的转向装置的横向稳定的转向干预来摆脱转向不足。相反,尤其是当按车桥地驱控后桥时,提高冗余后桥制动压力的制动压力调控就足够了。由此使车辆减速并降低了转向不足。可以设置的是,可选地对可能与车辆联接的挂车进行附加制动。由此,在一个变体中,可以迅速降低车辆连带挂车的速度。然而也能想到的是,在提高向车辆的后桥的制动压力调控的情况下,允许该车辆有意稍微滑动,以便进一步减少转向不足。降低转向不足的另外的可行方案可以按以下步骤进行:设定大约0
°
的转向角;将向优选是所有车桥的制动压力调控提高到最大值,该最大值优选仍能允许稳定的行驶,即优选没有或只有少量的滑移;两者都持续很短的时间;并随后:设定方向盘角度以使车辆路径更接近于计划的车辆路径。在该变体中可以车辆稍大程度地向弯道外侧移动,但短时的且强烈降速优选将车辆带引到稳定状态中,从而通过相应的转向干预引导车辆回到计划的路径上。这些变体也可以组合。例如,即使在简单地提高向后桥的制动压力调控的情况下也可以降低转向角,以便使车辆被带引到稳定状态中。
27.在第三方面,开头所述任务通过一种车辆、尤其是商用车辆来解决,该车辆具有根据上文所述的根据本发明的第一方面的车辆系统的优选的实施方式的车辆系统。优选地,被用在根据本发明第三方面的车辆中的根据本发明的第一方面的车辆系统被构造成用于实现根据本发明第二方面的方法。
28.应理解,根据本发明的第一方面的车辆系统、根据本发明的第二方面的方法和根据本发明的第三方面的车辆具有相同和相似的子方面,它们尤其是被记录在从属权利要求中。在这方面,对于车辆的特别的实施方式和另外的特征和优点全面地参考上面描述。
附图说明
29.现在下面结合附图对本发明的实施方式进行描述。这些附图不一定按比例示出实施方式,而是将被用于阐述的附图以示意性和/或稍微失真的形式来实施。有关由附图可直接识别得到的教导的补充内容,参见相关的现有技术。在此要考虑到,可以对实施方式的形式和细节进行相关的各种改型或变化,而不偏离本发明的一般思路。在说明书、附图以及权利要求书中公开的本发明的特征,无论是单独地,还是任意组合地,都对本发明的改进方案具有重要意义。此外,在说明书、附图和/或权利要求中公开的至少两个特征的所有组合都落入到本发明的范围内。本发明的一般思路不局限于以下所示和所述的优选实施方式的确
切形式或细节,也不局限于与权利要求请求保护的主题相比受到限制的主题。就设定的测量范围而言,在所述提到的极限范围内的值也应当作为极限值公开,并且可以任意使用,并受到权利保护。为简单起见,下面对相同或相似的部分或具有相同或相似功能的部分使用相同的附图标记。
30.本发明的另外的优点、特征和细节由以下对优选的实施方式的描述以及结合附图得知;其中:
31.图1示出本发明的示意性的系统布局;
32.图2示出具有根据本发明的车辆系统的车辆;
33.图3示出具有第二实施例的车辆系统的车辆;
34.图4示出处在弯道行驶的车辆;以及
35.图5示出方法的示意性的流程。
具体实施方式
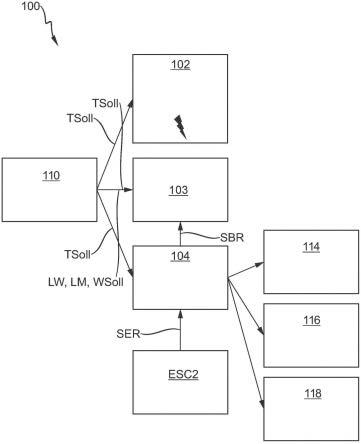
36.图1首先图解说明了车辆系统100的形式为方框图的总体结构。车辆系统100包括中央控制单元102,中央控制单元被设置成用于控制能电子控制的气动制动系统101(参见图2和图3)。中央控制单元102从目标轨迹控制部110接收目标轨迹tsoll。例如,目标轨迹控制部110可以是用于自主驾驶的单元112的一部分(参见图2和图3),但也可以在车辆200内部单独设置。此外有可能的是,目标轨迹控制部110被设置在云服务中,或经由这样的云服务供应数据,然后在此基础上生成目标轨迹tsoll。车辆系统100还包括能电子控制的转向装置103。能电子控制的转向装置103也从目标轨迹控制部110接收目标轨迹tsoll。能电子控制的转向装置103被设置成用于车辆200转向,并且可以作用于一个或多个车桥上。
37.在本发明的范围内,还设置有冗余控制单元104,该冗余控制单元在中央控制单元102的电子稳定调节部esc1(参见图2和图3)失效和/或不再正常工作时接管对制动系统101的控制。因此,冗余控制单元104包括或控制次要的前桥制动控制部114、次要的后桥制动控制部116和可选的次要的挂车制动控制部118。只有当车辆200被装备用于牵引挂车204(参见图2)时,才设置有次要的挂车制动控制部118。否则可以将该次要的挂车制动控制部省略。中央控制单元102相应地包括主要的前桥制动控制部、主要的后桥制动控制部和主要的挂车制动控制部,这是众所周知的。它们在图1中没有详细示出。
38.可选地,还设置有冗余电子稳定调节部esc2,它在此与冗余控制单元104连接。冗余电子稳定调节部esc2可以向冗余控制单元104提供冗余的esc信号ser,这一点将在后面详细描述。冗余控制单元104还与能电子控制的转向装置103连接,并向该能电子控制的转向装置提供冗余的制动信号sbr,冗余控制单元104优选也将冗余的制动信号提供给制动系统101中的相应的另外的模块,以用于对特定的车桥进行制动。
39.冗余控制单元104被设置成用于在冗余情况下,即当冗余控制单元104接管对制动系统101的控制时,按车桥地驱控其中至少一个车桥,尤其是前桥va和后桥ha。在按车桥地对车桥va、ha进行驱控的情况下,向该车桥va、ha的相应的制动执行器调控出相同的制动压力。然后,在该车桥上就不再发生符合车轮要求的制动。出于该原因,冗余控制单元104与能电子控制的转向装置103连接,在这种情况下,能电子控制的转向装置实施横向稳定的转向干预,以用于将车辆200保持在预定的目标轨迹tsoll的公差廊带tk内(参见图4)。因此在正
常运行期间,中央控制单元102可以独立控制制动系统101,并允许进行符合车轮要求的制动,而在冗余情况下,冗余控制单元104和能电子控制的转向装置103共同行动,以便使车辆200保持在目标轨迹tsoll上。
40.除了目标轨迹tsoll之外,能电子控制的转向系统103还可以接收并且调控出方向盘角度lw和转向力矩lm作为针对横向稳定的转向干预的目标值wsoll。
41.现在在描述了车辆系统100的基本概念后,图2和图3示出了车辆系统100在车辆200中的,即尤其是在商用车辆202中的两个具体实施方案。商用车辆202包括如上面基本描述的能电子控制的气动制动系统101。能电子控制的气动制动系统具有在此是形式为用于前桥va的前桥制动回路的第一制动回路2和在此是形式为用于后桥ha的后桥制动回路的第二制动回路4。第一制动回路2由第一压缩空气储备器20来进行供应。第一压缩空气储备器20提供储备压力pv。此外,在前桥va上还设置有第一和第二前桥制动执行器3a、3b,其中,第一前桥制动执行器3a被设置用于第一前车轮,在此为右前车轮5a,第二前桥制动执行器3b被设置用于第二前车轮,在此为左前车轮5b。在该实施方式中(图2),第一制动回路2符合车轮要求地提供前桥制动压力pbva,更确切地说给向第一前桥制动执行器3a提供第一前桥制动压力pbva1,并且向第二前桥制动执行器3b提供第二前桥制动压力pbva2。
42.第二制动回路4,在此是后桥制动回路,由第二压缩空气储备器22供应,第二压缩空气储备器也提供储备压力pv。在后桥ha上设置有第一和第二后桥制动执行器8a、8b,它们借助第二制动回路4来驱控。第一后桥制动执行器8a被设置用于第一后车轮5c,并且第二后桥制动执行器8b被设置用于第二后车轮5d。第二制动回路4符合车轮要求地向第一后桥制动执行器8a提供第一后桥制动压力pbha1,并且向第二后桥制动执行器8b提供第二后桥制动压力pbha2。由于符合车轮要求地调控出制动压力pbva1、pbva2、pbha1和pbha2,使得车辆200被保持在目标轨迹tsoll上,该目标轨迹由中央控制单元102的目标轨迹控制部110来提供。
43.在所示的实施例中,制动系统101还包括由第三压缩空气储备器24进行供应的驻车制动回路10。第三压缩空气储备器24也提供储备压力pv。驻车制动回路10具有驻车制动模块11,驻车制动模块接收来自第三压缩空气储备器24的储备压力pv。驻车制动回路10还具有位于车辆200的后桥ha上的第一和第二弹簧储能式执行器12a、12b。在图2所示的实施例中,第一和第二弹簧储能式执行器12a、12b与第一和第二后桥制动执行器8a、8b集成为所谓的tristop型制动缸。驻车制动模块11向第一和第二弹簧储能式执行器12a、12b调控出驻车制动压力pbp。弹簧储能式执行器12a、12b通常被如下这样地设计,即,其在没有压力的情况下压紧,而在施加的压力超过特定的压力的情况下抵抗弹簧的压力地打开。这样的弹簧储能式执行器12a、12b在现有技术中是众所周知的。
44.在制动系统101中,中央控制单元102经由车辆总线120与用于自主驾驶的单元112连接,并从该用于自主驾驶的单元接收目标轨迹tsoll。此外,中央控制单元102还可以接收另外的信号,如减速目标值zsoll。能电子控制的转向装置103也经由车辆总线120与制动系统101连接,并因此也与中央控制单元102通信。此外,正如已经参照图1描述的那样,制动系统101还包括冗余控制单元104,其在此同样与车辆总线120联接。此外,中央控制单元102和冗余控制单元104经由第二总线122直接彼此通信,并因此可以交换信号,如减速目标值zsoll。在图2中所示的实施例中,冗余控制单元104与驻车制动模块11集成。尤其地,冗余控
制单元104也同时形成了驻车制动模块11的电子控制单元。这是特别适宜的,这是因为在此所示的实施例中,驻车制动模块11反正都具有电子控制单元。但是替选地并且同样是优选地,冗余控制单元104是单独的模块,并且不与驻车制动模块11集成。
45.在此所示的实施例中,中央控制单元102也同时形成了后桥调制器,并直接与第二压缩空气储备器22联接。这也不是绝对必要的,并且后桥调制器也能够与中央控制单元102分开设置。中央控制单元102(其在此形成后桥调制器)然后基于接收的减速目标值zsoll来符合车轮要求地向后桥ha调控出相应的第一和第二后桥制动压力pbha1、pbha2。电子控制单元102具有电子稳定调节部esc1,其在此集成在该电子控制单元中。电子稳定调节部esc1与第一和第二前桥车轮转速传感器14a、14b以及第一和第二后桥车轮转速传感器16a、16b连接。经由这些车轮转速传感器,中央控制单元102接收第一、第二、第三和第四车轮转速信号sw1、sw2、sw3、sw4。这些车轮转速信号被中央控制单元102或电子稳定调节部esc1用来实现将后桥制动压力pbh符合车轮要求地调控成第一和第二后桥制动压力pbha1、pbha2,从而使得第一和第二后车轮5c、5d不抱死。
46.在此,在前桥va上设置有前桥调制器6,其本身不具有智能。前桥调制器6经由前桥信号线路124直接与中央控制单元102连接,经由中央控制单元提供前桥制动信号svb。基于前桥制动信号svb,直接切换前桥调制器6内部的一个或多个电磁阀,以便因此从前桥调制器将在该前桥调制器上存在的储备压力pv调控成前桥制动压力pbva。前桥调制器6在此被构造为双通道前桥调制器,并且包括第一前桥通道6.1和第二前桥通道6.2。在第一前桥通道6.1与第一前桥制动执行器3a之间接连有第一前桥abs阀26。同样,在第二前桥通道6.2与第二前桥制动执行器3b之间接连有第二前桥abs阀28。第一和第二前桥abs阀由中央控制单元102经由第一和第二abs线路126、128驱控,以便因此从前桥制动压力pbva导出或调控出以因车轮而异地调控出的第一和第二前桥制动压力pbva1和pbva2。为此,中央控制单元102使用来自第一和第二前桥车轮转速传感器14a、14b的第一和第二车轮转速信号sw1、sw2。
47.最后,制动系统101具有手动的制动值发送器105以及手动的驻车制动开关107,以用于在此没有进一步描述的手动控制。二者基本上都是已知的并在此不作进一步描述。在本公开内容中,尤其要关注的是涉及制动系统101的自主运行的方面。
48.在包括中央控制单元102的主要系统的电子稳定调节部esc1现在不工作或不正常工作的情况下,冗余控制单元104将接管对制动系统101的控制。为此目的,冗余控制单元104与第一和第二后桥车轮转速传感器16a、16b连线,并从它们那里接收第三和第四车轮转速信号sw3、sw4。由于冗余控制单元104与车辆总线102连接,并因此接收了目标减速zsoll和目标轨迹tsoll,使得冗余控制单元104能够在该情况下经由弹簧储能式执行器12a、12b以因车轮而异的方式并冗余地对后桥ha进行制动。为此目的,冗余控制单元104以因车轮而异的方式为第一和第二后车轮5c、5d调控出冗余的后桥制动压力prha。冗余控制单元104也与第一和第二前桥车轮转速传感器14a、14b连接,并因此也从它们那里接收第一和第二车轮转速信号sw1、sw2。然而,冗余控制单元104不会驱控第一和第二前桥abs阀26、28。冗余控制单元104只会经由气动的冗余压力线路130向前桥调制器6调控出冗余压力pr,然后由该前桥调制器6以纯气动的方式将该冗余压力转换成前桥冗余制动压力prva。该前桥冗余制动压力在前桥va上不是因车轮而异的。这意味着,在该实施方式中(图2),前桥va被按车桥地进行驱控。冗余控制单元104按车桥地驱控前桥va,而后桥ha仍然以因车轮而异的方式被
制动。然而,在前桥va上仍然经由与第一和第二前桥车轮转速传感器14a、14b的冗余的布线来截取第一和第二车轮转速信号sw1、sw2,并由冗余控制单元104经由车辆总线120提供。在此基础上,能电子控制的转向装置103可以对前桥va实施横向稳定的转向干预,以便对在该前桥上不再存在的因车轮而异的制动进行补偿,并因此确保车辆稳定。
49.在这里所示的实施例中,制动系统101还包括冗余电子稳定调节部esc2,它经由第三总线132与冗余控制单元104连接,并向该冗余控制单元提供冗余的稳定信号swr。在调控出后桥冗余制动压力prha时,也可能要考虑到这些冗余的稳定信号,以及也经由车辆总线120提供用于能电子控制的转向装置103。
50.从图2还得知,中央控制单元102与第一电压源106连接,而冗余控制单元104与第二电压源108连接。第一和第二电压源106、108是分开的,从而使得一个电压源不因为另一个发生故障而失效。此外,中央控制单元102经由车辆总线120提供esc信号se1,然后这些esc信号可以被能电子控制的转向装置103接收,以便在调控出横向稳定的转向干预时将这些esc信号考虑在内。
51.图3中示出了包括车辆系统100的第二实施例的车辆200的第二实施例。在下文中,将强调与第一实施例(图2)的主要区别,而相似之处则不再进一步描述。相同的附图标记被用于相同和类似的元件,从而针对这些元件全面参考上面的描述。
52.第一个主要区别在于,在本实施例(图3)中,在冗余控制单元104接管对制动系统101的控制的情况下,后桥ha被按车桥地驱控。这意味着,在该实施例(图3)中,后桥冗余制动压力prha不是像第一实施例(图2)中那样符合车轮要求地被调控出。相反,将相同的冗余制动压力、即后桥冗余制动压力prha输送给左和右后车轮5c、5d进而在本实施例中是第一和第二弹簧储能式执行器12a、12b。尽管如此,在本实施例中仍设置有通向后桥车轮转速传感器16a、16b的冗余布线(图3),但也可以可选地被省略掉。例如可以设置的是,冗余控制单元104经由车辆总线120接收第三和第四车轮转速度信号sw3、sw4,并优选获知要调控出的转向补偿。然后,冗余控制单元104可以将所获知的转向补偿以转向角度或转向力矩的形式作为目标值传送给能电子控制的转向装置103,从而使得该能电子控制的转向装置可以实现调控出横向稳定的转向干预。
53.此外,与第一实施例(图2)不同地,在第二实施例(图3)中设置的是,在冗余情况下,前桥va可以被逐个车轮地驱控。在第一实施例(图2)中,前桥va在冗余情况下通过冗余控制单元104按车桥地驱控,而在第二实施例(图3)中,前桥va被逐个车轮地制动。
54.为此目的,首先设置有另外的abs阀,即第一冗余abs阀30和第二冗余abs阀32。第一冗余abs阀30被接连在第一前桥abs阀26与第一前桥制动执行器3a之间。在正常运行中,当制动系统101通过中央控制单元102控制时,第一冗余abs阀30不被操纵,并使由第一前桥abs阀26调控出的第一前桥制动压力pbva1通过,并以不变的方式向第一前桥制动执行器3a调控出。第二冗余abs阀32以相应的方式接连在第二前桥abs阀28与第二前桥制动执行器3b之间。在正常运行中,该第二冗余abs阀也是开放的,并允许第二前桥制动压力pbva2通过。第一和第二冗余abs阀30、32经由第一和第二冗余abs信号线路134、136都与冗余控制单元104连接。如在第一实施例中那样,第一和第二前桥车轮转速传感器14a、14b也冗余地与冗余控制单元104连接,从而使该冗余控制单元接收第一和第二车轮转速信号sw1、sw2。在此所示的第二实施例(图3)中因此有可能的是,在冗余情况下,前桥va通过冗余控制单元104
被符合车轮要求地驱控。前桥调制器6再次双通道地构造,并且向第一通道6.1和第二通道6.2提供不被进一步调制的前桥制动压力pbva,并在该情况下,使得第一和第二前桥abs阀26、28以开放的方式使前桥制动压力pbva通过,而第一和第二冗余abs阀30、32对该压力进行调制,以便因此将前桥冗余制动压力符合车轮要求地作为第一前桥冗余制动压力prva1提供给第一前桥制动执行器3a使用,并将第二前桥冗余制动压力prva2符合车轮要求地提供给第二前桥制动执行器3b使用。
55.因此,在第一实施例(图2)中只有前桥va被按车桥地驱控,而后桥ha被逐个车轮地驱控,但在第二实施例(图3)中只有后桥ha被按车桥地驱控,而前桥va被符合车轮要求地驱控。然而应理解,也可以有如下实施方式,在其中,在冗余的情况下,前桥va和后桥ha都被按车桥地驱控。如果设置有另外的车桥,如第二后桥、第二前桥或附加车桥,则这些车桥也可以在冗余情况下被按车桥地驱控。在此不需要在冗余的情况下对所有车桥进行按车桥地驱控,相反,当这些车桥中只有一个被按车桥地驱控时就足够了。
56.这一点在图4中尤其进行了图解说明。图4示出了处于转弯行驶中的车辆200,即商用车辆202,它包括根据本发明的车辆系统100。图解说明地,绘制了目标轨迹tsoll的转弯走向,其在此相应于右转弯。在目标轨迹tsoll周围绘制了公差廊带tk。当借助能电子控制的转向装置103执行横向稳定的转向干预时,车辆200应被保持在该公差廊带tk之内,即使在冗余的情况下也是如此。在车辆200上绘制了前桥转向力fv和后桥转向力fh。由于车辆200处于冗余运行中并且冗余电子控制单元104已经接管了控制,因此向前桥va调控出前桥冗余制动压力prva,并向后桥ha调控出后桥冗余制动压力prha。
57.当现在获知了不同的转向力fv、fh时,优选的是,在前桥va和后桥ha中那个在其上施加较高转向力fv、fh的车桥上,提高前桥冗余制动压力prva或后桥冗余制动压力prha的制动压力调控。例如,如果前桥转向力fv大于后桥转向力fh,则优选的是,提高前桥冗余制动压力prva的制动压力水平。由此可以提高车辆稳定。
58.当在沿目标轨迹tsoll转弯行驶时确认转向过度to时,则优选的是,提高向前桥va且可选地还向挂车204的前桥冗余制动压力prva的制动压力调控(参见图2)。由此,更多地“经由前桥发生移动”,从而可以摆脱转向过度to。同时优选的是,借助能电子控制的转向装置103朝弯道外侧方向转向,以便进一步降低转向过度to。通常,这种干预可以在正常运行中通过符合车轮要求地调控出前桥制动压力pbva来实现。然而,由于在根据此处所示的实施例(图4)的冗余运行中,前桥va和后桥ha都按车桥地制动,所以在这种情况下,能电子控制的转向装置103有必要进行横向稳定的转向干预,在这种情况下,在朝弯道外侧方向实施转向,以便使车辆200因此保持在目标轨迹tsoll上或在公差廊带tk之内。
59.与之不同地,如果确认车辆200转向不足tu,则优选提高向后桥ha的后桥冗余制动压力prha的制动压力调控。可选地,也提高向挂车204的制动压力调控。由此首先降低了车辆的速度,同时提高了前桥va的牵引力,从而可以摆脱转向不足,以便使车辆200保持在目标轨迹tsoll上。
60.图5现在再次纯示意性地图解说明了用于使车辆200、尤其是商用车辆202减速和转向的方法300,车辆包括根据本发明的车辆系统100的上述优选的实施方式中的一个的车辆系统100。
61.方法300从获知301能电子控制的气动制动系统101的电子稳定调节部esc1(参见
图2和图3)失效的步骤开始。作为响应,如上所述,实施的是,冗余且按车桥地调控出302前桥冗余制动压力prva或后桥冗余制动压力prha。同时,根据需要实施横向稳定的转向干预304,即如上面特别描述的那样借助能电子控制的转向装置103实施。由此使得车辆200之后保持在预定的目标轨迹tsoll的公差廊带tk(参见图4)内。
62.然后在步骤305中检查,车辆200是否仍在目标轨迹tsoll上。如果是这种情况,返回到步骤305,并再次查验,车辆200是否仍在目标轨迹tsoll上。然而,如果不是这种情况,则在步骤306中检查,是否存在转向过度或转向不足。如果获知转向过度to,则优选在步骤308中,提高向前桥va的前桥冗余制动压力prva的制动压力调控,并同时借助能电子控制的转向装置103向弯道外侧方向转向。然而,如果获知转向不足tu,则优选在步骤310中提高向后桥ha的后桥冗余制动压力prha的制动压力调控。随后,该方法返回到检查车辆200是否在目标轨迹tsoll上或在公差廊带tk之内。
63.附图标记列表(说明书的一部分)
[0064]2ꢀꢀꢀꢀꢀꢀꢀꢀ
第一制动回路
[0065]
3a、3b
ꢀꢀꢀꢀ
第一和第二前桥制动执行器
[0066]4ꢀꢀꢀꢀꢀꢀꢀꢀ
第二制动回路
[0067]
5a、5b
ꢀꢀꢀꢀ
第一和第二前车轮
[0068]
5c、5d
ꢀꢀꢀꢀ
第一和第二后车轮
[0069]6ꢀꢀꢀꢀꢀꢀꢀꢀ
前桥调制器
[0070]
6.1
ꢀꢀꢀꢀꢀꢀ
第一前桥通道
[0071]
6.2
ꢀꢀꢀꢀꢀꢀ
第二前桥通道
[0072]
8a、8b
ꢀꢀꢀꢀ
第一和第二后桥制动执行器
[0073]
10
ꢀꢀꢀꢀꢀꢀꢀ
驻车制动回路
[0074]
12a、12b第一和第二弹簧储能式执行器
[0075]
14a、14b第一和第二前桥车轮转速传感器
[0076]
16a、16b第一和第二后桥车轮转速传感器
[0077]
20
ꢀꢀꢀꢀꢀꢀꢀ
第一压缩空气储备器
[0078]
22
ꢀꢀꢀꢀꢀꢀꢀ
第二压缩空气储备器
[0079]
24
ꢀꢀꢀꢀꢀꢀꢀ
第三压缩空气储备器
[0080]
26
ꢀꢀꢀꢀꢀꢀꢀ
第一前桥abs阀
[0081]
28
ꢀꢀꢀꢀꢀꢀꢀ
第二前桥abs阀
[0082]
30
ꢀꢀꢀꢀꢀꢀꢀ
第一冗余abs阀
[0083]
32
ꢀꢀꢀꢀꢀꢀꢀ
第二冗余abs阀
[0084]
100
ꢀꢀꢀꢀꢀꢀ
车辆系统
[0085]
101
ꢀꢀꢀꢀꢀꢀ
能电子控制的气动制动系统
[0086]
102
ꢀꢀꢀꢀꢀꢀ
中央控制单元
[0087]
104
ꢀꢀꢀꢀꢀꢀ
冗余控制单元
[0088]
106
ꢀꢀꢀꢀꢀꢀ
第一电压源
[0089]
108
ꢀꢀꢀꢀꢀꢀ
第二电压源
[0090]
110
ꢀꢀꢀꢀꢀꢀ
目标轨迹控制部
[0091]
112
ꢀꢀꢀꢀꢀꢀ
用于自主驾驶的单元
[0092]
114
ꢀꢀꢀꢀꢀꢀ
次要的前桥制动控制部
[0093]
116
ꢀꢀꢀꢀꢀꢀ
次要的后桥制动控制部
[0094]
118
ꢀꢀꢀꢀꢀꢀ
次要的挂车制动控制部
[0095]
120
ꢀꢀꢀꢀꢀꢀ
车辆总线
[0096]
122
ꢀꢀꢀꢀꢀꢀ
第二总线
[0097]
124
ꢀꢀꢀꢀꢀꢀ
前桥信号线路
[0098]
126
ꢀꢀꢀꢀꢀꢀ
第一abs信号线路
[0099]
128
ꢀꢀꢀꢀꢀꢀ
第二abs信号线路
[0100]
130
ꢀꢀꢀꢀꢀꢀ
气动冗余压力线路
[0101]
132
ꢀꢀꢀꢀꢀꢀ
第三总线
[0102]
134
ꢀꢀꢀꢀꢀꢀ
第一冗余abs信号线路
[0103]
136
ꢀꢀꢀꢀꢀꢀ
第二冗余abs信号线路
[0104]
200
ꢀꢀꢀꢀꢀꢀ
车辆
[0105]
202
ꢀꢀꢀꢀꢀꢀ
商用车辆
[0106]
204
ꢀꢀꢀꢀꢀꢀ
挂车
[0107]
300
ꢀꢀꢀꢀꢀꢀ
方法
[0108]
301-310步骤
[0109]
11
ꢀꢀꢀꢀꢀꢀꢀ
驻车制动模块
[0110]
103
ꢀꢀꢀꢀꢀꢀ
能电子控制的转向系统
[0111]
esc1
ꢀꢀꢀꢀꢀ
电子稳定调节部
[0112]
esc2
ꢀꢀꢀꢀꢀ
冗余电子稳定调节部
[0113]
fh
ꢀꢀꢀꢀꢀꢀꢀ
前桥转向力
[0114]
fv
ꢀꢀꢀꢀꢀꢀꢀ
后桥转向力
[0115]
ha
ꢀꢀꢀꢀꢀꢀ
后桥
[0116]
ha2
ꢀꢀꢀꢀꢀꢀ
另外的后桥
[0117]
lw
ꢀꢀꢀꢀꢀꢀ
方向盘角度
[0118]
lm
ꢀꢀꢀꢀꢀꢀ
转向力矩
[0119]
pbha
ꢀꢀꢀꢀ
后桥制动压力
[0120]
pbha1第一后桥制动压力
[0121]
pbha2第二后桥制动压力
[0122]
pbp
ꢀꢀꢀꢀꢀꢀ
驻车制动压力
[0123]
pbva
ꢀꢀꢀꢀꢀ
前桥制动压力
[0124]
pbva1
ꢀꢀꢀꢀ
第一前桥制动压力
[0125]
pbva2
ꢀꢀꢀꢀ
第二前桥制动压力
[0126]
prha
ꢀꢀꢀꢀ
后桥冗余制动压力
[0127]
prva
ꢀꢀꢀꢀꢀ
前桥冗余制动压力
[0128]
prva1
ꢀꢀꢀꢀ
第一前桥冗余制动压力
[0129]
prva2
ꢀꢀꢀꢀ
第二前桥冗余制动压力
[0130]
to
ꢀꢀꢀꢀꢀꢀꢀ
转向过度
[0131]
tk
ꢀꢀꢀꢀꢀꢀꢀ
公差廊带
[0132]
tsoll
ꢀꢀꢀꢀ
目标轨迹
[0133]
tu
ꢀꢀꢀꢀꢀꢀꢀ
转向不足
[0134]
sbr
ꢀꢀꢀꢀꢀꢀ
冗余的制动信号
[0135]
ser
ꢀꢀꢀꢀꢀꢀ
冗余的esc信号
[0136]
svb
ꢀꢀꢀꢀꢀꢀ
前桥制动信号
[0137]
sw1
ꢀꢀꢀꢀꢀꢀ
第一车轮转速信号
[0138]
sw2
ꢀꢀꢀꢀꢀ
第二车轮转速信号
[0139]
sw3
ꢀꢀꢀꢀꢀꢀ
第三车轮转速信号
[0140]
sw4
ꢀꢀꢀꢀ
第四车轮转速信号
[0141]
va
ꢀꢀꢀꢀꢀꢀꢀ
前桥
[0142]
wsoll
ꢀꢀꢀꢀ
针对横向稳定的转向干预的目标值
[0143]
zsoll
ꢀꢀꢀꢀ
减速目标值
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1