一种支撑高度可调的全向走行驱动轮
1.本发明涉及一种全向走行驱动轮,具体涉及一种支撑高度可调的全向走行驱动轮。
背景技术:
2.近年来,无人机已经大量应用于军事及民用领域,在搜索救援、实时监视、侦察、交通监控、有害区域检查和网络延伸等方面的重要性及优势得到了广泛认可。中、大型固定翼无人机以其速度快、航程远、挂载能力强等特点在军事目标查打、搜索救援及物资运送投放任务中相较于小型旋翼和固定翼无人机体现出明显优势,而必须在机场或航母的跑道上才能起降这一限制大大降低了这类无人机的应用灵活性和快速响应能力。因此,研发一种能够在野外环境快速展开布置的大型平台作为中、大型固定翼无人机起降跑道成为国内外无人机装备领域的一个潜在研究热点。考虑到野外运输车辆的运载能力,采用具有地面360度全向走行能力且高度和姿态可调整的功能型平台单元对接拼合组成大型跑道平台是一种合理可行的技术方案。
3.为了在野外不平地面上对接拼合组成符合要求的大型跑道平台,这类功能型平台单元需要具有全向自主走行能力,同时还要能够灵活调整单元台面与地面及其他单元台面间的相对位置和姿态,本发明涉及的支撑高度可调的全向走行驱动轮是这类功能型平台单元需要的核心功能部件。国内外对能够在野外环境快速展开布置的大型跑道平台的研发还处在初期探索阶段,目前还没有见到有用于这类大型跑道平台的类似走行驱动轮的相关资料。
技术实现要素:
4.本发明的目的是为了实现对现有野外拼合大型平台具有全向自主走行能力,能够灵活调整单元台面与地面相对位置和姿态的走行机构,进而提供一种支撑高度可调的全向走行驱动轮。
5.本发明为解决上述问题而采用的技术方案是:
6.它包括升降机构、旋转电机机构、走行机构和基架;升降机构包括驱动调整缸、基座和纵向导筒;驱动调整缸的壳体和基座由上至下固定安装在基架上,驱动调整缸的伸缩端穿过基座并与基座的纵向导筒顶端固定连接,旋转电机机构顶部固定端与纵向导筒的底端固定连接,旋转电机机构底部旋转端与走行机构顶端固定连接。
7.本发明的有益效果是:
8.1、本发明设计了一种支撑高度可调的全向走行驱动轮。功能型平台单元底部配置4个支撑高度可调的全向走行驱动轮进行行走,平台单元台面即可具备三维空间中所有的六个自由度3个移动自由度和3个转动自由度,从而为各平台单元对接拼合组成大型平台提供保障和技术支撑。
9.2、本技术中走行机构3的轮毂电机33轮毂电机、旋转电机机构2及驱动调整缸11均
为直流供电,便于应用到电池供电的平台单元上,有利于保证平台单元的独立自主及应用灵活性。
10.3、驱动调整缸11为电动推拉杆,能够快速精确调整全向走行驱动轮系统的支撑高度。
11.4、基于旋转电机机构2上的测角传感器转子26、测角传感器定子27测角传感器检测数据,同一平台单元的多个走行驱动轮的转向电机可以驱动车轮在360度范围精确协同定向。
12.5、走行机构3的车轮采用轮毂电机直驱形式,结构紧凑、传动效率高。
附图说明
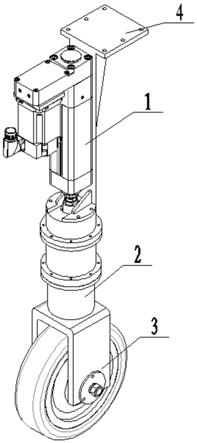
13.图1是本技术的立体结构示意图。
14.图2是本技术的立体结构主视图。
15.图3是本技术图2中a-a向视图。
16.图4是本技术图2中b-b向视图。
具体实施方式
17.具体实施方式一:结合图1-图4说明本实施方式,本实施方式所述一种支撑高度可调的全向走行驱动轮,它包括升降机构1、旋转电机机构2、走行机构3和基架4;升降机构包括驱动调整缸11、基座12和纵向导筒13;驱动调整缸11的壳体和基座12由上至下固定安装在基架4上,驱动调整缸11的伸缩端穿过基座12并与基座12的纵向导筒13顶端固定连接,旋转电机机构2顶部固定端与纵向导筒13的底端固定连接,旋转电机机构2底部旋转端与走行机构3顶端固定连接。
18.本实施方式中驱动调整缸11为电动推拉杆,驱动调整缸11的生产厂家为美国派克汉尼汾公司parker hannifin corporation,产品型号为eth050。
19.走行机构3为能自动行走的轮体,旋转电机机构2为底端能进行旋转的电机结构。本实施方式中基架4提供了走行驱动轮与平台单元台面间的机械连接接口,实现台面与地面间距调整的高度调整缸固定在基架4上,驱动调整缸11的缸杆端部通过旋转电机机构2与走行机构3连接,精确调整支撑高度。
20.具体实施方式二:结合图1-图4说明本实施方式,本实施方式所述一种支撑高度可调的全向走行驱动轮,基座12包括基座罩筒121、基座筒122和联轴器123;基座罩筒121底端和基座筒122顶端固定连接,联轴器123顶端与驱动调整缸11的伸缩端固定连接,联轴器123底端与纵向导筒13顶端固定连接,纵向导筒13滑动设置在基座罩筒121和基座筒122内,联轴器123在基座罩筒121上滑动。其它与具体实施方式一相同。
21.本实施方式中基座罩筒121、基座筒122和基架4连接成一体,作为高度可调的走行驱动轮的机架,保证整体结构的牢固和稳定。
22.具体实施方式三:结合图1-图4说明本实施方式,本实施方式所述一种支撑高度可调的全向走行驱动轮,纵向导筒13外圆面为圆形筒体,基座罩筒121和基座筒122内侧壁为与纵向导筒13外侧壁配合的圆形腔体。其它与具体实施方式一相同。
23.具体实施方式四:结合图1-图4说明本实施方式,本实施方式所述一种支撑高度可
调的全向走行驱动轮,旋转电机机构2包括转向电机壳21、转向电机定子22、转向电机转子23和转向轴24;转向电机壳21顶端与纵向导筒13的底端固定连接,转向电机定子22固定安装在转向电机壳21内壁上,转向电机转子23安装在转向电机定子22内并与转向电机定子22转动连接,转向轴24固定安装在转向电机转子23内,走行机构3顶端固定安装在转向轴24底端上。其它与具体实施方式一相同。
24.本实施方式中旋转电机机构2的电机生产厂家为河北宇捷电机科技有限公司,产品型号为ddsm25-03。
25.具体实施方式五:结合图1-图4说明本实施方式,本实施方式所述一种支撑高度可调的全向走行驱动轮,旋转电机机构2还包括测角传感器转子26、测角传感器定子27和测角传感器定子座28;测角传感器定子27安装在测角传感器定子座28上,测角传感器定子座28安装在转向电机壳21上,测角传感器转子26和测角传感器定子27套设在转向轴24上。其它与具体实施方式一、二、三或四相同。
26.具体实施方式六:结合图1-图4说明本实施方式,本实施方式所述一种支撑高度可调的全向走行驱动轮,旋转电机机构2还包括转向轴承25;转向轴承25套装在转向轴24上,转向轴25通过转向轴承25与转向电机壳21转动连接。其它与具体实施方式一相同。
27.具体实施方式七:结合图1-图4说明本实施方式,本实施方式所述一种支撑高度可调的全向走行驱动轮,走行机构3包括轮轴支架31、轮胎32、轮毂电机33和轮轴锁定组件34;轮轴支架31为u形架,轮胎32固定安装在轮毂电机33的转子上,且轮胎32设置在轮轴支架31内,轮毂电机33的定子通过轮轴锁定组件34固定安装在轮轴支架31上,轮轴支架31的顶端与转向轴24底端通过螺栓固定连接。其它与具体实施方式一相同。
28.本实施方式中通过轮毂电机33驱动轮胎32进行滚动,实现行走功能。轮毂电机33生产厂家为深圳中菱科技有限公司,产品型号为zllg80asm250-l双轴电机。
29.具体实施方式八:结合图4说明本实施方式,本实施方式所述一种支撑高度可调的全向走行驱动轮,基座12还包括直线轴承124;直线轴承124安装在基座筒122的内侧壁上,纵向导筒13通过直线轴承124在基座筒122上沿轴向方向滑动设置。其它与具体实施方式八相同。
30.本实施方式中纵向导筒13和基座筒122之间设置直线轴承124的目的是可以降低高度可调的走行驱动轮在进行高度调整时的摩擦力,又可以限制纵向导筒13和基座筒122间的相对转动。
31.工作原理
32.一组(若干个)功能型平台单元由运载车辆运送到拟布置跑道平台的野外地点,被依次彼此靠近地卸载到跑道平台的延伸方向上,实现平台单元的粗定位。经过支撑高度可调全向走行驱动轮的一些列动作,完成多平台单元的姿态调整、对接,并最终组合构成一个满足要求的大型跑道平台:
33.1、由于野外地面的凹凸不平且整体上存在水平偏差,所以各平台单元的台面大概率处在非水平状态。各平台单元首先根据各自台面配置的水平检测传感器测量水平度误差及偏离的姿态,由平台单元的控制器基于平台单元调平控制算法计算出台面下所配置的4个支撑高度可调的全向走行驱动轮各自需要升高或降低的距离,然后分别向4个走行驱动轮升降机构1驱动电机的驱动器发出相应的控制信号,控制驱动电机通过驱动调整缸11的
伸缩端带动联轴器123、纵向导筒13、旋转电机机构2、走行机构3在基座筒122内直线轴承124约束下做相应的升降调整动作,使得各平台单元的台面最终处在水平状态。完成台面水平调整的各个平台单元彼此之间必然还存在台面高度不同的问题,跑道平台上位控制系统检测各平台单元台面高度参数后依据前述驱动轮工作流程,各平台单元控制器控制各自平台的4个驱动轮做同步举升或降低动作。
34.2、初步完成升降调整后,各平台单元的方向通常与跑道平台最终方向会存在一定的不一致偏差。通过各平台单元控制器与跑道平台上位控制系统的协同检测与计算,依托测角传感器转子26、测角传感器定子27的协调工作,控制各平台单元4个全向走行驱动轮的旋转电机机构2驱动走行机构3精确定向到绕旋转电机机构2回转轴线360度范围内的相应方向上,然后再控制驱动走行机构3的轮毂电机33转动,带动平台单元在水平方向做平移及绕竖直轴的转动,完成平台单元间的相对姿态和位置的精确调整,到位后激活平台单元间的锁定装置使各平台单元连接成一个整体,得到满足固定翼无人机起降要求的跑道平台。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1