供电辅助装置、车辆及供电装置的制作方法
1.本发明涉及供电辅助装置、车辆及供电装置。
背景技术:
2.以往,已知有在设置于地面的供电装置与车辆之间以非接触方式传送电力的技术。例如,日本特开2018-157686记载了从车辆向供电装置以无线方式发送供电要求,根据供电要求进行从供电装置向车辆的非接触供电的技术。
技术实现要素:
3.然而,在通过无线通信来检测车辆向供电装置的接近的情况下,由于障碍物等而无线通信受到妨碍,由此可能无法在适当的时机产生交流磁场。
4.因此,本技术的发明人等进行了仔细研讨的结果是发现了使用交流磁场作为车辆的位置信号的技术。然而,在供电装置的周边存在车辆以外的交流磁场的产生源的情况下,由于在供电装置的周边产生的交流磁场而车辆的检测可能受到阻碍。
5.因此,本发明提供一种在进行从供电装置向车辆的非接触供电时,能够降低在供电装置的周边产生的交流磁场对车辆检测的影响的供电辅助装置、车辆及供电装置。
6.本公开的第一形态涉及一种供电辅助装置。所述供电辅助装置包括处理器。所述处理器构成为,取得磁场检测器的输出,所述磁场检测器构成为检测设置于地面的供电装置的周边的磁场。而且,所述处理器构成为,基于所述磁场检测器的输出,向车辆指示变更作为位置信号从所述车辆对所述供电装置产生的交流磁场的频率。
7.在上述第一形态的供电辅助装置中,所述处理器可以构成为,通过将所述交流磁场的频率的推荐值向所述车辆发送而对所述车辆指示变更所述交流磁场的频率。
8.在上述第一形态的供电辅助装置中,所述处理器可以构成为,将所述推荐值向所述车辆及所述供电装置发送。
9.在上述第一形态的供电辅助装置中,可以是,所述供电装置构成为进行基于磁场谐振耦合的非接触供电,所述处理器构成为,将所述推荐值设定为与所述磁场谐振耦合的谐振频率不同的值。
10.在上述第一形态的供电辅助装置中,所述处理器可以构成为,在对所述供电装置产生的交流磁场的频率与通过所述磁场检测器检测到的交流磁场的频率之差小于规定值的情况下,向所述车辆指示变更对所述供电装置产生的交流磁场的频率。
11.本公开的第二形态涉及一种车辆,构成为从设置于地面的供电装置以非接触方式接受供电。所述车辆包括:交流磁场产生电路,构成为产生交流磁场作为该车辆的位置信号;控制装置,构成为基于通过磁场检测器检测到的所述供电装置的周边的磁场,来变更所述交流磁场的频率。
12.本公开的第三形态涉及一种供电装置,构成为以非接触方式对车辆供电。所述供电装置包括:磁场检测器,构成为检测该供电装置的周边的磁场;控制装置,所述控制装置
构成为,从所述磁场检测器的输出提取特定的频率的交流磁场,基于该特定的频率的交流磁场来检测所述车辆向该供电装置的接近。所述控制装置构成为,基于通过所述磁场检测器或其他的磁场检测器检测到的该供电装置的周边的磁场,来变更所述特定的频率。
13.根据本发明的形态,在进行从供电装置向车辆的非接触供电时,能够降低在供电装置的周边产生的交流磁场对车辆检测的影响。
附图说明
14.下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,附图中相同的附图标记表示相同的元件,其中:
15.图1是概略性地表示本发明的第一实施方式的非接触供电系统的结构的图。
16.图2是供电装置的控制器的概略性的构成图。
17.图3是表示车辆的ecu的概略性的结构及其他的车载设备的图。
18.图4是概略性地表示本发明的第一实施方式的供电辅助系统的图。
19.图5是概略性地表示服务器的结构的图。
20.图6是第一实施方式中的服务器的处理器的功能框图。
21.图7是表示在第一实施方式中在服务器中执行的控制例程的流程图。
22.图8是表示在第一实施方式中在车辆中执行的控制例程的流程图。
23.图9是概略性地表示本发明的第二实施方式的供电辅助系统的图。
24.图10是表示在第二实施方式中在服务器中执行的控制例程的流程图。
25.图11是表示在第二实施方式中在供电装置中执行的控制例程的流程图。
26.图12是概略性地表示本发明的第三实施方式的供电辅助系统的图。
27.图13是第三实施方式中的控制器的处理器的功能框图。
具体实施方式
28.以下,参照附图,详细说明本发明的实施方式。需要说明的是,在以下的说明中,对同样的构成要素标注同一附图标记。
29.《第一实施方式》
30.以下,参照图1~图8,说明本发明的第一实施方式。
31.图1是概略性地表示本发明的第一实施方式的非接触供电系统1的结构的图。非接触供电系统1具备设置于地面的供电装置2、车辆3,进行供电装置2与车辆3之间的非接触供电。特别是在本实施方式中,非接触供电系统1在车辆3行驶时,通过磁场谐振耦合(磁场共振)进行从供电装置2向车辆3的非接触供电。即,非接触供电系统1以磁场为介质从供电装置2向车辆3传送电力。需要说明的是,非接触供电也称为非接触电力传送、无线电力传送或无线供电。
32.供电装置2构成为以非接触方式对车辆3供电,车辆3构成为从供电装置2以非接触方式接受供电。具体而言,供电装置2具备构成为以非接触方式发送电力的送电装置4,车辆3具备构成为以非接触方式从送电装置4接收电力的受电装置5。
33.如图1所示,供电装置2除了具备送电装置4之外,还具备电源21及控制器22。供电装置2设置于车辆3通过的道路(车道),例如埋入于地下(路面之下)。需要说明的是,供电装
置2的至少一部分(例如电源21及控制器22)可以配置于路面之上。
34.电源21是送电装置4的电力源,向送电装置4供给电力。电源21例如是供给单相交流电力的商用交流电源。需要说明的是,电源21可以是供给三相交流电力的交流电源等。
35.送电装置4具备送电侧整流电路41、逆变器42及送电侧谐振电路43。在送电装置4中,经由送电侧整流电路41及逆变器42向送电侧谐振电路43供给用于使其产生交流磁场的交流电力(高频电力)。
36.送电侧整流电路41与电源21及逆变器42电连接。送电侧整流电路41对于从电源21供给的交流电力进行整流而转换成直流电力,并将直流电力向逆变器42供给。送电侧整流电路41例如是ac/dc转换器。
37.逆变器42与送电侧整流电路41及送电侧谐振电路43电连接。逆变器42将从送电侧整流电路41供给的直流电力转换成比电源21的交流电力高的频率的交流电力(高频电力),将高频电力向送电侧谐振电路43供给。
38.送电侧谐振电路43具有由线圈44及电容器45构成的谐振器。线圈44及电容器45的各种参数(线圈44的外径及内径、线圈44的匝数、电容器45的静电电容等)以使送电侧谐振电路43的谐振频率成为规定的设定值的方式确定。规定的设定值例如为10khz~100ghz,可以是作为非接触电力传送用的频率带域而通过saetirj2954标准确定的85khz。
39.送电侧谐振电路43以线圈44的中心位于车道的中央的方式配置于车辆3通过的车道的中央。当从逆变器42供给的高频电力向送电侧谐振电路43施加时,送电侧谐振电路43产生用于传送电力的交流磁场。需要说明的是,电源21可以是燃料电池或太阳能电池那样的直流电源,在该情况下,送电侧整流电路41可以省略。
40.控制器22例如是通用计算机,进行供电装置2的各种控制。例如,控制器22电连接于送电装置4的逆变器42,为了控制基于送电装置4的电力发送而控制逆变器42。
41.图2是控制器22的概略性的构成图。控制器22具有存储器23及处理器24。存储器23及处理器24经由信号线而相互连接。需要说明的是,控制器22可以还具有能够进行供电装置2与供电装置2的外部的通信的通信接口等。控制器22是供电装置2的控制装置的一例。
42.存储器23例如具有易失性的半导体存储器(例如ram)及非易失性的半导体存储器(例如rom)。存储器23存储在处理器24中执行的程序、在通过处理器24执行各种处理时使用的各种数据等。
43.处理器24具有一个或多个cpu(central processing unit)及其周边电路,执行各种处理。需要说明的是,处理器24可以还具有逻辑运算单元或数值运算单元那样的运算电路。
44.另一方面,如图1所示,车辆3除了具备受电装置5之外,还具备电动机31、蓄电池32、动力控制单元(pcu:power control unit)33及电子控制单元(ecu:electronic control unit)34。在本实施方式中,车辆3是未搭载内燃机的电动机动车(bev),电动机31输出行驶用的动力。
45.电动机31例如是交流同步电动机,作为电动机及发电机发挥功能。电动机31在作为电动机发挥功能时,以蓄电池32蓄积的电力为动力源被驱动。电动机31的输出经由减速器及车轴向车轮90传递。另一方面,在车辆3的减速时,通过车轮90的旋转来驱动电动机31,电动机31作为发电机发挥功能而发电出再生电力。
46.蓄电池32是能够充电的二次电池,例如,由锂离子电池、镍氢电池等构成。蓄电池32蓄积车辆3的行驶所需的电力(例如电动机31的驱动电力)。当将通过电动机31发电的再生电力向蓄电池32供给时,蓄电池32被充电,蓄电池32的充电率(soc:state of charge)恢复。需要说明的是,蓄电池32可以是经由设置于车辆3的充电口通过供电装置2以外的外部电源也能够充电。
47.pcu33电连接于蓄电池32及电动机31。pcu33具有逆变器、升压转换器及dc/dc转换器。逆变器将从蓄电池32供给的直流电力转换成交流电力,并将交流电力向电动机31供给。另一方面,逆变器将通过电动机31发电的交流电力(再生电力)转换成直流电力,并将直流电力向蓄电池32供给。升压转换器在将蓄电池32蓄积的电力向电动机31供给时,根据需要对蓄电池32的电压进行升压。dc/dc转换器在将蓄电池32蓄积的电力向前照灯等电子设备供给时,对蓄电池32的电压进行降压。
48.受电装置5具备受电侧谐振电路51、受电侧整流电路54及充电电路55。受电装置5从送电装置4接收电力,并将接收到的电力向蓄电池32供给。
49.受电侧谐振电路51以与路面的距离减小的方式配置于车辆3的底部。在本实施方式中,受电侧谐振电路51在车宽方向上配置于车辆3的中央,在车辆3的前后方向上配置于前轮90与后轮90之间。
50.受电侧谐振电路51具有与送电侧谐振电路43同样的结构,具有由线圈52及电容器53构成的谐振器。线圈52及电容器53的各种参数(线圈52的外径及内径、线圈52的匝数、电容器53的静电电容等)以受电侧谐振电路51的谐振频率与送电侧谐振电路43的谐振频率一致的方式确定。需要说明的是,如果受电侧谐振电路51的谐振频率与送电侧谐振电路43的谐振频率的偏离量小,则例如在受电侧谐振电路51的谐振频率为送电侧谐振电路43的谐振频率的
±
20%的范围内时,受电侧谐振电路51的谐振频率不需要一定与送电侧谐振电路43的谐振频率一致。
51.如图1所示,在受电侧谐振电路51与送电侧谐振电路43相对时,如果在送电侧谐振电路43产生交流磁场,则交流磁场的振动向以与送电侧谐振电路43相同的谐振频率谐振的受电侧谐振电路51传递。其结果是,通过电磁感应而在受电侧谐振电路51流动感应电流,通过感应电流而在受电侧谐振电路51产生感应电动势。在受电侧谐振电路51产生的感应电动势经由受电侧整流电路54及充电电路55向蓄电池32回收。即,送电侧谐振电路43向受电侧谐振电路51发送电力,受电侧谐振电路51从送电侧谐振电路43接收电力。
52.受电侧整流电路54电连接于受电侧谐振电路51及充电电路55。受电侧整流电路54对于从受电侧谐振电路51供给的交流电力进行整流而转换成直流电力,并将直流电力向充电电路55供给。受电侧整流电路54例如是ac/dc转换器。
53.充电电路55电连接于受电侧整流电路54及蓄电池32。充电电路55将从受电侧整流电路54供给的直流电力转换成蓄电池32的电压电平而向蓄电池32供给。当从送电装置4发送的电力由受电装置5向蓄电池32供给时,蓄电池32被充电,蓄电池32的soc恢复。充电电路55例如是dc/dc转换器。
54.ecu34进行车辆3的各种控制。例如,ecu34电连接于受电装置5的充电电路55,为了控制基于从送电装置4发送的电力的蓄电池32的充电而控制充电电路55。而且,ecu34电连接于pcu33,为了控制蓄电池32与车载设备(例如电动机31)之间的电力的授受而控制
pcu33。
55.图3是表示ecu34的概略性的结构及其他的车载设备的图。ecu34具有通信接口35、存储器36及处理器37。通信接口35、存储器36及处理器37经由信号线相互连接。ecu34是车辆3的控制装置的一例。
56.通信接口35具有用于向遵照can(controller area network)等的标准的车内网络连接ecu34的接口电路。
57.存储器36例如具有易失性的半导体存储器(例如ram)及非易失性的半导体存储器(例如rom)。存储器36存储在处理器37中执行的程序、在通过处理器37执行各种处理时使用的各种数据等。
58.处理器37具有一个或多个cpu(central processing unit)及其周边电路,执行各种处理。需要说明的是,处理器37可以还具有逻辑运算单元或数值运算单元那样的运算电路。
59.另外,如图3所示,车辆3还具备gnss接收机38、地图数据库39及通信装置40。gnss接收机38、地图数据库39及通信装置40电连接于ecu34。
60.gnss接收机38基于从多个(例如三个以上)的测位卫星得到的测位信息,检测车辆3的当前位置(例如车辆3的纬度及经度)。具体而言,gnss接收机38捕捉多个测位卫星,接收从测位卫星发送的电波。然后,gnss接收机38基于电波的发送时刻与接收时刻之差来算出至测位卫星的距离,基于至测位卫星的距离及测位卫星的位置(轨道信息)来检测车辆3的当前位置。gnss接收机38的输出、即由gnss接收机38检测到的车辆3的当前位置向ecu34发送。
61.需要说明的是,gnss(global navigation satellite system:全球定位卫星系统)是美国的gps、俄罗斯的glonass、欧洲的galileo、日本的qzss、中国的beidou、印度的irnss等的卫星测位系统的总称。因此,gnss接收机38包括gps接收机。
62.地图数据库39存储地图信息。地图信息包含供电装置2的位置信息等。ecu34从地图数据库39取得地图信息。需要说明的是,可以是地图数据库39设置于车辆3的外部(例如服务器等),ecu34从车辆3的外部取得地图信息。
63.通信装置40是能够进行车辆3与车辆3的外部的通信的设备(例如,近距离无线通信模块、用于向互联网那样的通信网络连接车辆3的数据通信模块(dcm:data communication module)等)。ecu34经由通信装置40与车辆3的外部通信。
64.如上所述,在非接触供电系统1中,经由在供电装置2中产生的交流磁场进行车辆3的非接触供电。然而,为了非接触供电而在供电装置2中始终产生交流磁场的情况会带来电力的浪费。而且,也担心交流磁场对电子设备等的影响。
65.因此,优选在车辆3在供电装置2的上方通过的适当的时机产生用于供电的交流磁场。然而,在通过无线通信检测车辆3向供电装置2的接近的情况下,由于障碍物等而无线通信受到妨碍,由此可能无法在适当的时机产生交流磁场。
66.因此,在本实施方式中,非接触供电系统1具备位置信号发送装置6及车辆检测装置7,使用位置信号发送装置6及车辆检测装置7来检测车辆3向供电装置2的接近。如图1所示,位置信号发送装置6设置于车辆3,车辆检测装置7设置于供电装置2。
67.位置信号发送装置6将车辆3的位置信号向供电装置2发送。如图1所示,位置信号
发送装置6具备交流电力产生电路61及交流磁场产生电路62。位置信号发送装置6产生交流磁场作为车辆3的位置信号。需要说明的是,位置信号发送装置6可以除了车辆3的位置信号之外,还将车辆3的辨别信息(例如车辆id)经由交流磁场向供电装置2发送。
68.交流电力产生电路61电连接于蓄电池32及交流磁场产生电路62。交流电力产生电路61产生交流电力,并将交流电力向交流磁场产生电路62供给。例如,交流电力产生电路61具有振荡电路及放大器。振荡电路例如由逆变器构成,将从蓄电池32供给的直流电力转换成规定频率的交流电力。放大器将振荡电路的输出电力(交流电力)放大。
69.如图1所示,交流磁场产生电路62以与路面的距离减小的方式配置于车辆3的底部。在本实施方式中,交流磁场产生电路62在车宽方向上配置于车辆3的中央,在车辆3的前后方向上配置于比受电侧谐振电路51靠后方处。需要说明的是,交流磁场产生电路62在车辆3的前后方向上可以配置在与受电侧谐振电路51相同的位置或者比受电侧谐振电路51靠前方处。
70.交流磁场产生电路62具有与送电侧谐振电路43及受电侧谐振电路51同样的结构,具有由线圈63及电容器64构成的谐振器。当从交流电力产生电路61供给的交流电力向交流磁场产生电路62施加时,交流磁场产生电路62产生交流磁场作为车辆3的位置信号。
71.如图1所示,交流电力产生电路61电连接于ecu34,ecu34控制交流电力产生电路61。交流电力产生电路61基于来自ecu34的指令,将从蓄电池32供给的直流电力转换成交流电力,并将交流电力向交流磁场产生电路62供给。
72.例如,在供电装置2与车辆3之间的距离成为了规定值以下时,ecu34控制交流电力产生电路61而通过交流磁场产生电路62产生交流磁场。供电装置2与车辆3之间的距离例如通过将利用gnss接收机38检测到的车辆3的当前位置与存储于地图数据库39的供电装置2的位置进行比对来算出。需要说明的是,可以在从设置于供电装置2的近前的路侧机经由通信装置40接收到规定的信号时,ecu34控制交流电力产生电路61而通过交流磁场产生电路62产生交流磁场。而且,可以在车辆3正在行驶时,ecu34通过交流磁场产生电路62使微弱的交流磁场始终产生。
73.另外,pcu33可以作为交流电力产生电路61发挥功能。在该情况下,pcu33电连接于交流磁场产生电路62,ecu34控制pcu33而通过交流磁场产生电路62产生交流磁场。
74.在本实施方式中,车辆检测装置7构成作为检测供电装置2的周边的磁场的磁场检测器。车辆检测装置7例如是磁阻抗(mi:magneto-impedance)传感器。车辆检测装置7的驱动电力从例如电源21等经由驱动电路向车辆检测装置7供给。需要说明的是,车辆检测装置7可以是霍尔传感器、磁阻效应(mr:magneto resistive)传感器等。
75.车辆检测装置7在设有送电装置4的道路中,在车辆3的行进方向上配置于比送电装置4的送电侧谐振电路43靠近前处,配置在车辆3通过的车道的中央。车辆检测装置7配置在地下(路面之下)或路面之上。当从接近供电装置2的车辆3产生交流磁场作为位置信号时,车辆检测装置7检测从车辆3产生的交流磁场。需要说明的是,车辆检测装置7可以沿着与车辆3的行进方向垂直的方向配置多个。
76.车辆检测装置7电连接于控制器22,车辆检测装置7的输出向控制器22发送。控制器22基于车辆检测装置7的输出来检测车辆3向供电装置2的接近,控制从供电装置2向车辆3的非接触供电。具体而言,控制器22从车辆检测装置7的输出中提取特定的频率的交流磁
场,基于提取的特定的频率的交流磁场来检测车辆3向供电装置2的接近。特定的频率是作为位置信号而从车辆3产生的交流磁场的频率,相当于检测对象的交流磁场的频率。在本实施方式中,通过这样使用交流磁场作为车辆3的位置信号,能够降低位置信号的收发中的障碍物的影响。
77.此外,在本实施方式中,作为位置信号使用的交流磁场的频率与送电侧谐振电路43及受电侧谐振电路51的谐振频率不同。因此,为了供电而在供电装置2的送电侧谐振电路43中产生的交流磁场与在车辆3的交流磁场产生电路62中产生的交流磁场的辨别变得容易。因此,通过使用与供电用的交流磁场不同的频率的交流磁场作为车辆3的位置信号,能够高精度地检测接近供电装置2的车辆3。
78.作为位置信号使用的交流磁场的频率可以设定为比送电侧谐振电路43及受电侧谐振电路51的谐振频率低的值。由此,能够使作为位置信号使用的交流磁场更容易产生。例如,在送电侧谐振电路43及受电侧谐振电路51的谐振频率为85khz的情况下,位置检知用的交流磁场的频率设定为50hz~50khz,例如设定为1khz。
79.然而,在供电装置2的周边存在车辆3以外的交流磁场的产生源(例如电子设备等)的情况下,由于在供电装置2的周边产生的交流磁场而车辆3的检测可能受到阻碍。因此,在本实施方式中,根据在供电装置2的周边产生的交流磁场的频率,变更作为位置信号而从车辆3对供电装置2产生的交流磁场的频率。
80.图4是概略性地表示本发明的第一实施方式的供电辅助系统10的图。供电辅助系统10通过作为位置信号而从车辆3对供电装置2产生的交流磁场的频率的最佳化,对从供电装置2向车辆3的非接触供电进行辅助。如图4所示,供电辅助系统10具备磁场检测器11及服务器12。服务器12是供电辅助装置的一例。
81.磁场检测器11设置在供电装置2的周边,检测供电装置2的周边的磁场。磁场检测器11设置于供电装置2的各设置区域。即,在供电装置2的设置区域存在多个的情况下,在多个设置区域分别设置磁场检测器11。
82.磁场检测器11例如是磁阻抗(mi)传感器。需要说明的是,磁场检测器11可以是霍尔传感器、磁阻效应(mr)传感器等。
83.磁场检测器11具有通信接口,经由通信接口连接于通信网络8。磁场检测器11的输出,即由磁场检测器11检测到的供电装置2的周边的磁场经由通信网络8向服务器12发送。
84.图5是概略性地表示服务器12的结构的图。服务器12具备通信接口13、储存装置14、存储器15及处理器16。通信接口13、储存装置14及存储器15经由信号线连接于处理器16。需要说明的是,服务器12可以还具备键盘及鼠标那样的输入装置、显示器那样的输出装置等。而且,服务器12可以由多个计算机构成。
85.通信接口13具有用于将服务器12连接于通信网络8的接口电路,能够进行服务器12与服务器12的外部的通信。服务器12经由通信网络8及无线基站9能够与车辆3相互通信。通信接口13是服务器12的通信部的一例。
86.储存装置14例如具有硬盘驱动(hdd)、固态硬盘(ssd)、或者光记录介质及其访问装置。储存装置14存储各种数据,例如存储有处理器16用于执行各种处理的计算机程序等。储存装置14是服务器12的存储部的一例。
87.存储器15具有非易失性的半导体存储器(例如ram)。存储器15暂时存储有例如在
通过处理器16执行各种处理时使用的各种数据等。存储器15是服务器12的存储部的一例。
88.处理器16具有一个或多个cpu及其周边电路,执行各种处理。需要说明的是,处理器16可以还具有逻辑运算单元、数值运算单元或图形处理单元那样的其他的运算电路。
89.图6是第一实施方式中的服务器12的处理器16的功能框图。在本实施方式中,处理器16具有磁场取得部17及频率变更部18。磁场取得部17及频率变更部18是通过服务器12的处理器16执行服务器12的储存装置14存储的计算机程序而实现的功能模块。需要说明的是,磁场取得部17及频率变更部18可以通过设置于处理器16的专用的运算电路实现。
90.磁场取得部17取得磁场检测器11的输出。频率变更部18基于磁场检测器11的输出,对车辆3指示变更作为位置信号从车辆3对供电装置2产生的交流磁场的频率。然后,车辆3的ecu34基于来自服务器12的指示,变更从车辆3对供电装置2产生的交流磁场的频率。即,ecu34基于由磁场检测器11检测到的供电装置2的周边的磁场,变更从车辆3对供电装置2产生的交流磁场的频率。因此,在本实施方式中,考虑供电装置2的周边的磁场来设定相当于车辆3的位置信号的交流磁场的频率,因此能够降低在供电装置2的周边产生的磁场对车辆检测的影响。
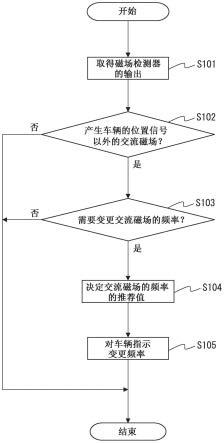
91.以下,参照图7及图8的流程图,详细说明上述的。图7是表示在第一实施方式中在服务器12中执行的控制例程的流程图。本控制例程由服务器12的处理器16以规定的执行间隔反复执行。需要说明的是,在设有磁场检测器11的供电装置2的设置区域存在多个的情况下,对多个设置区域分别执行本控制例程。
92.首先,在步骤s101中,磁场取得部17取得从磁场检测器11经由通信网络8向服务器12发送的磁场检测器11的输出。
93.接下来,在步骤s102中,频率变更部18基于磁场检测器11的输出,判定在供电装置2的周边是否产生车辆3的位置信号以外的交流磁场。例如,在通过磁场检测器11检测到的交流磁场不包含车辆3的辨别信息的情况下,频率变更部18判定为在供电装置2的周边产生车辆3的位置信号以外的交流磁场。
94.另外,在供电装置2的周边不存在车辆3时通过磁场检测器11检测到交流磁场的情况下,频率变更部18可以判定为在供电装置2的周边产生车辆3的位置信号以外的交流磁场。在该情况下,频率变更部18例如基于从多个车辆3分别向服务器12定期地发送的车辆3的位置信息(例如通过车辆3的gnss接收机38检测到的车辆3的当前位置),判定在供电装置2的周边是否存在车辆3。而且,可以将金属探知机、光电传感器(例如扩散反射型的光电传感器)或相机那样的检测器与磁场检测器11一起设置在供电装置2的周边,频率变更部18基于该检测器的输出,判定在供电装置2的周边是否存在车辆3。
95.在步骤s102中,频率变更部18判定为未发生车辆3的位置信号以外的交流磁场的情况下,本控制例程结束。另一方面,在步骤s102中,频率变更部18在判定为产生车辆3的位置信号以外的交流磁场的情况下,本控制例程进入步骤s103。
96.在步骤s103中,频率变更部18判定是否需要变更作为位置信号从车辆3对供电装置2产生的交流磁场的频率。例如,频率变更部18在对供电装置2产生的交流磁场的频率与通过磁场检测器11检测到的交流磁场的频率之差小于规定值的情况下,判定为需要变更交流磁场的频率。规定值考虑从车辆3以外的产生源产生的交流磁场对车辆检测的影响程度而预先确定。需要说明的是,频率变更部18可以在上述差小于规定值且通过磁场检测器11
检测到的交流磁场的强度为预先确定的阈值以上的情况下,判定为需要变更交流磁场的频率。
97.在步骤s103中,频率变更部18判定为不需要变更交流磁场的频率的情况下,本控制例程结束。另一方面,在步骤s103中,频率变更部18在判定为需要变更交流磁场的频率的情况下,本控制例程进入步骤s104。
98.在步骤s104中,频率变更部18以从车辆3对供电装置2产生的交流磁场的频率与通过磁场检测器11检测到的交流磁场的频率不同的方式,决定从车辆3对供电装置2产生的交流磁场的频率的推荐值。例如,频率变更部18通过使交流磁场的频率的当前的设定值移位规定量来算出推荐值。此时,在本实施方式中,频率变更部18将推荐值设定为与磁场谐振耦合的谐振频率(例如85khz)不同的值。由此,即使在变更频率之后,也能够容易进行对供电装置2产生的交流磁场与在供电装置2的送电侧谐振电路43中产生的交流磁场的辨别。
99.另外,推荐值可以设定为比磁场谐振耦合的谐振频率低的值。由此,能够更容易产生对供电装置2产生的交流磁场。需要说明的是,可以作为交流磁场的频率而预先准备多个选择项,频率变更部18从多个选择项之中,选择与通过磁场检测器11检测到的交流磁场的频率不同的频率作为推荐值。
100.在步骤s105中,频率变更部18对车辆3指示变更从车辆3对供电装置2产生的交流磁场的频率。具体而言,频率变更部18通过将推荐值向车辆3发送而对车辆3指示变更交流磁场的频率。需要说明的是,在具备受电装置5的车辆3存在多个的情况下,频率变更部18对多个车辆3分别指示变更交流磁场的频率。
101.另外,频率变更部18可以仅对多个车辆3中的特定的车辆3指示变更交流磁场的频率。例如,频率变更部18可以仅对于预定了来自供电装置2的非接触供电的车辆3,例如在设有供电装置2的车道上正朝向供电装置2行驶的车辆3指示变更交流磁场的频率。在该情况下,车辆3的位置及行驶方向基于从多个车辆3分别向服务器12定期地发送的车辆3的位置信息(例如通过车辆3的gnss接收机38检测到的车辆3的当前位置)来确定。在步骤s105之后,本控制例程结束。
102.图8是表示在第一实施方式中在车辆3中执行的控制例程的流程图。本控制例程由车辆3的ecu34的处理器37以规定的执行间隔反复执行。
103.首先,在步骤s201中,处理器37判定从服务器12是否接收到交流磁场的频率的变更指示。处理器37在判定为未接收到频率的变更指示的情况下,本控制例程结束。另一方面,处理器37在判定为接收到频率的变更指示的情况下,本控制例程进入步骤s202。
104.在步骤s202中,处理器37变更作为位置信号从车辆3对供电装置2产生的交流磁场的频率,即车辆3接近供电装置2时通过交流磁场产生电路62产生的交流磁场的频率。具体而言,处理器37将交流磁场的频率从当前的设定值变更为从服务器12发送的推荐值。处理器37在变更交流磁场的频率时,例如通过变更交流电力产生电路61的逆变器中的pwm控制的设定(例如对输出电压的正负进行切换的开关的时钟脉冲频率的计数值等)来变更交流电力产生电路61的输出频率。在步骤s202之后,本控制例程结束。
105.需要说明的是,可以省略图7的步骤s104,从服务器12向车辆3发送的频率的变更指示不包含变更后的频率的值(推荐值)。在该情况下,在步骤s202中,处理器37将交流磁场的频率变更为与当前的设定值不同的值。变更后的频率的值例如是与磁场谐振耦合的谐振
频率(例如85khz)不同的值,可以是比磁场谐振耦合的谐振频率低的值。
106.《第二实施方式》
107.第二实施方式的供电辅助系统的结构及控制除了以下说明的点之外,基本上与第一实施方式的供电辅助系统的结构及控制相同。因此,以下,关于本发明的第二实施方式,以与第一实施方式不同的部分为中心进行说明。
108.图9是概略性地表示本发明的第二实施方式的供电辅助系统10’的图。与第一实施方式同样,供电辅助系统10’具备磁场检测器11及服务器12。
109.在第二实施方式中,作为供电辅助装置发挥功能的服务器12经由通信网络8能够与供电装置2通信。服务器12的频率变更部18对车辆3及供电装置2指示变更作为位置信号从车辆3对供电装置2产生的交流磁场的频率。然后,供电装置2的控制器22基于来自服务器12的指示来变更检测对象的交流磁场的频率。即,控制器22基于通过磁场检测器11检测到的供电装置2的周边的磁场,变更检测对象的交流磁场的频率。
110.图10是表示在第二实施方式中在服务器12中执行的控制例程的流程图。本控制例程由服务器12的处理器16以规定的执行间隔反复执行。需要说明的是,在设有磁场检测器11的供电装置2的设置区域存在多个的情况下,对多个设置区域分别执行本控制例程。
111.步骤s301~s304与图7的步骤s101~s104同样地执行。在步骤s304之后,在步骤s305中,频率变更部18对车辆3及供电装置2指示变更对供电装置2产生的交流磁场的频率。具体而言,频率变更部18通过将交流磁场的频率的推荐值向车辆3及供电装置2发送来对车辆3指示变更交流磁场的频率。在步骤s305之后,本控制例程结束。
112.图11是表示在第二实施方式中在供电装置2中执行的控制例程的流程图。本控制例程由供电装置2的控制器22的处理器24以规定的执行间隔反复执行。
113.首先,在步骤s401中,处理器24判定从服务器12是否接收到交流磁场的频率的变更指示。处理器24在判定为未接收到频率的变更指示的情况下,本控制例程结束。另一方面,处理器24在判定为接收到频率的变更指示的情况下,本控制例程进入步骤s402。
114.装置步骤s402中,处理器24变更交流磁场的检测对象的频率。具体而言,处理器24将检测对象的频率从当前的设定值变更为从服务器12发送的推荐值。例如,处理器24对车辆检测装置7的输出进行频率解析而提取检测对象的频率成分,基于提取的频率成分的值(峰值),判定车辆3是否接近供电装置2。在该情况下,将频率解析(例如傅里叶变换)中的检测对象的频率成分变更为推荐值。
115.另外,处理器24可以对车辆检测装置7的输出进行滤波处理来提取检测对象的频率成分。在该情况下,将检测对象的频率成分不同的多个滤波电路设置在车辆检测装置7与控制器22之间,将多个滤波电路中的提取与推荐值对应的频率成分的滤波电路连接于车辆检测装置7。在步骤s402之后,本控制例程结束。
116.需要说明的是,在第二实施方式中,也与第一实施方式同样地在车辆3中执行图8的控制例程。
117.《第三实施方式》
118.第三实施方式的供电辅助系统的结构及控制除了以下说明的点之外,基本上与第一实施方式的供电辅助系统的结构及控制相同。因此,以下,关于本发明的第三实施方式,以与第一实施方式不同的部分为中心进行说明。
119.图12是概略性地表示本发明的第三实施方式的供电辅助系统10”的图。在第三实施方式中,供电辅助系统10”具备供电装置2的车辆检测装置7及控制器22。即,车辆检测装置7作为检测供电装置2的周边的磁场的磁场检测器发挥功能,控制器22作为供电辅助装置发挥功能。控制器22具有通信接口,控制器22及车辆3经由通信网络8及无线基站9能够相互通信。
120.图13是第三实施方式中的控制器22的处理器24的功能框图。在第三实施方式中,处理器24具有磁场取得部17及频率变更部18。磁场取得部17及频率变更部18是通过控制器22的处理器24执行控制器22的存储器23存储的计算机程序而实现的功能模块。需要说明的是,磁场取得部17及频率变更部18可以通过设置于处理器24的专用的运算电路实现。
121.在第三实施方式中,通过控制器22的处理器24执行图7的控制例程。此时,在步骤s101中,磁场取得部17取得车辆检测装置7的输出。步骤s102~s105如关于第一实施方式的上述的说明那样被执行。
122.《其他的实施方式》
123.以上,说明了本发明的实施方式,但是本发明没有限定为这些实施方式,在权利要求书的记载内能够实施各种修正及变更。例如,产生交流磁场作为车辆3的位置信号的交流磁场产生电路62不需要使用磁场谐振耦合,因此可以不具有电容器64。
124.另外,车辆3可以是具备内燃机及电动机作为行驶用的动力源的混合动力车辆(hev)或插电式混合动力车辆(phev)。而且,车辆3可以是自动地控制车辆3的加速、转向及减速(制动)的至少一部分的自动驾驶车辆。此外,车辆3可以是公共汽车或卡车那样的商用车、无人搬运车(agv:automated guided vehicle)等。
125.另外,作为从供电装置2向车辆3的非接触供电的手法,并不局限于包含磁场谐振方式的电磁感应方式,可以使用以电场为介质而传送电力的电场耦合方式那样的各种手法。
126.另外,上述的实施方式可以任意地组合实施。例如,在第一实施方式及第二实施方式中,可以省略磁场检测器11,供电装置2的车辆检测装置7作为检测供电装置2的周边的磁场的磁场检测器发挥功能。而且,在向第二实施方式组合第三实施方式的情况下,通过控制器22的处理器24执行图10的控制例程。此时,在步骤s301中,磁场取得部17取得车辆检测装置7的输出,在步骤s305中,频率变更部18对车辆3指示变更交流磁场的频率,并变更供电装置2中的交流磁场的检测对象的频率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1