自动泊车系统、自动泊车系统的控制方法以及存储介质与流程
本发明涉及自动泊车系统、自动泊车系统的控制方法以及存储介质。
背景技术:
1、以往,作为与自动泊车系统相关的技术文献,已知有日本特开2020-079079。在该公报中公示出了一种通过停车场管制服务器(基础设施)进行车辆的自主泊车的自动代客泊车的方法。
2、再者,为了在多台车辆的自动代客泊车中避免车辆相互接触,考虑在成为入库车辆的泊车目标的目标泊车空间、出库车辆所泊车的出库对象空间的周围的所有的车辆的出库入库完成之前不开始新的出库入库。然而,若在所有的车辆的出库入库完成之前不开始新的出库入库,则由于会使自动代客泊车的停车场利用效率下降而成为问题。
技术实现思路
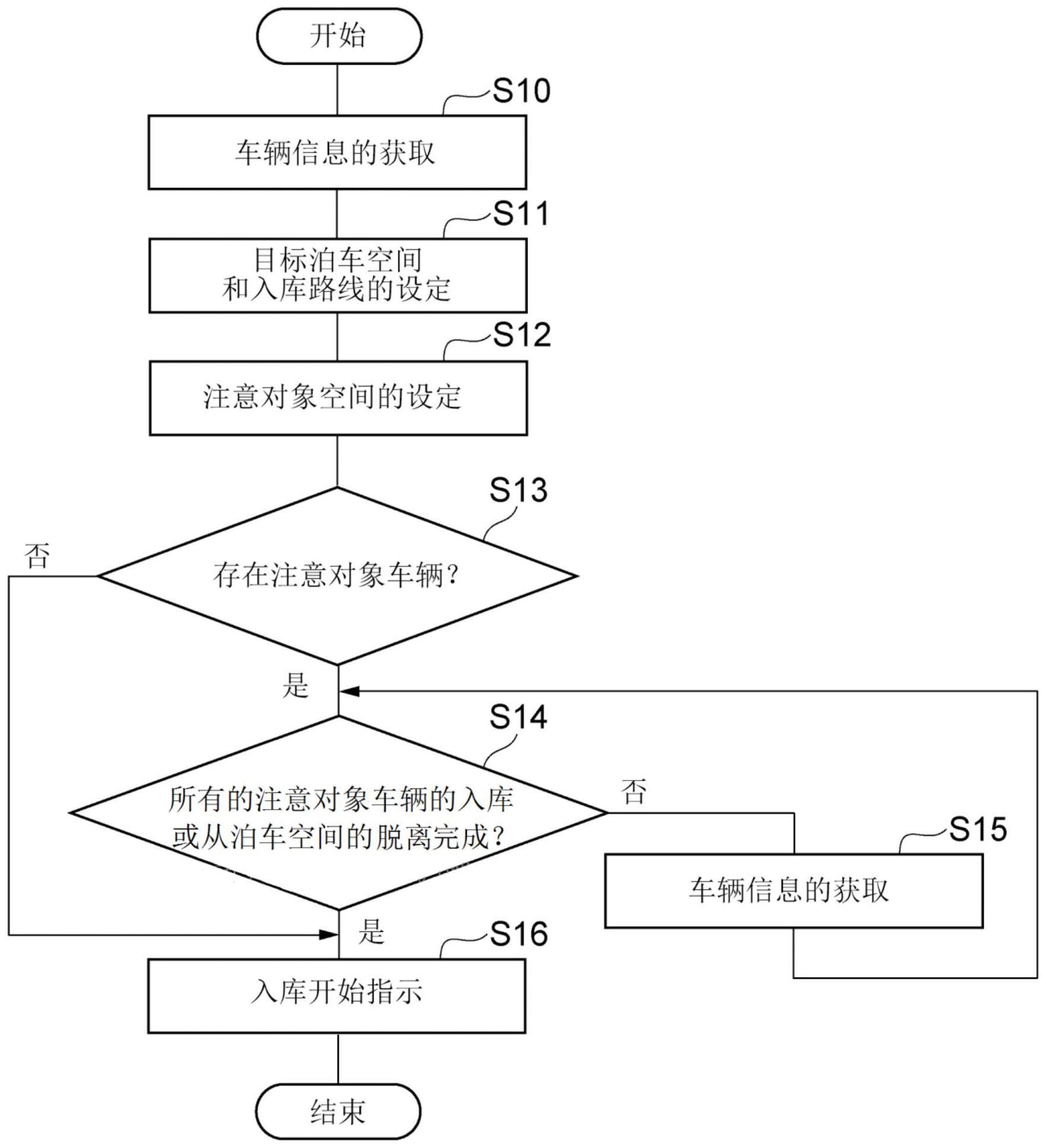
1、本发明的第一方案的自动泊车系统被配置为进行使自动驾驶车辆自动地泊车于从停车场内的多个泊车空间中设定的目标泊车空间的自动代客泊车。自动泊车系统包括车辆信息获取部、注意对象空间设定部、注意对象车辆判定部、完成判定部以及车辆指示部。车辆信息获取部被配置为获取包括停车场内的自动驾驶车辆的位置信息和自动驾驶车辆的出库入库信息的车辆信息。注意对象空间设定部被配置为基于入库车辆的目标泊车空间和包括停车场的入口位置信息的停车场地图信息来设定注意对象空间,其中,所述入库车辆是成为自动代客泊车的入库对象的自动驾驶车辆,所述注意对象空间是目标泊车空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响入库车辆的入库的泊车空间。注意对象车辆判定部被配置为基于停车场地图信息和车辆信息来判定在注意对象空间中是否存在作为出库入库中的自动驾驶车辆的注意对象车辆。完成判定部被配置为在通过注意对象车辆判定部判定为存在注意对象车辆的情况下,基于停车场地图信息和车辆信息来判定所有的注意对象车辆的入库或从泊车空间的脱离是否完成了。车辆指示部被配置为在通过注意对象车辆判定部判定为存在注意对象车辆的情况下,在通过完成判定部判定为所有的注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对入库车辆的入库开始指示。
2、根据这样的构成,对目标泊车空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响入库车辆的入库的注意对象空间进行设定,在注意对象空间中存在作为出库入库中的自动驾驶车辆的注意对象车辆的情况下,在判定为注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对入库车辆的入库开始指示。因此,与目标泊车空间的周围的所有的出库入库完成之前不进行入库开始指示的情况相比,能提高自动代客泊车的停车场利用效率。
3、在上述第一方案的自动泊车系统中,也可以是,还具备路线设定部,该路线设定部基于入库车辆的当前位置、入库车辆的目标泊车空间以及停车场地图信息来设定入库车辆到目标泊车空间的入库路线,注意对象空间设定部基于入库路线、入库车辆的目标泊车空间以及停车场地图信息来设定注意对象空间。
4、根据这样的构成,考虑入库车辆的入库路线来设定注意对象空间,因此,能不将其他车辆的出库入库不与入库路线发生干扰的泊车空间包括在注意对象空间中,从而能进行适当的注意对象空间的设定。
5、在上述第一方案的自动泊车系统中,注意对象车辆中也可以包括退避车辆,该退避车辆是暂时地退避至注意对象空间或从注意对象空间暂时地退避至停车场的行驶路的自动驾驶车辆。
6、根据这样的构成,能通过将退避车辆包括在注意对象车辆中来抑制与注意对象空间相关的退避车辆对入库车辆的入库造成影响。
7、本发明的第二方案的自动泊车系统被配置为进行使自动驾驶车辆自动地泊车于从停车场内的多个泊车空间中设定的目标泊车空间的自动代客泊车。自动泊车系统包括车辆信息获取部、注意对象空间设定部、注意对象车辆判定部、完成判定部以及车辆指示部。车辆信息获取部被配置为获取包括停车场内的自动驾驶车辆的位置信息和自动驾驶车辆的出库入库信息的车辆信息。注意对象空间设定部被配置为基于出库车辆所泊车的出库对象空间和包括停车场的出口位置信息的停车场地图信息来设定注意对象空间,其中,所述出库车辆是成为自动代客泊车的出库对象的自动驾驶车辆,所述注意对象空间是出库对象空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响出库车辆的出库的泊车空间。注意对象车辆判定部被配置为基于停车场地图信息和车辆信息来判定在注意对象空间中是否存在作为出库入库中的自动驾驶车辆的注意对象车辆。完成判定部被配置为在通过注意对象车辆判定部判定为存在注意对象车辆的情况下,基于停车场地图信息和车辆信息来判定所有的注意对象车辆的入库或从泊车空间的脱离是否完成了。车辆指示部被配置为在通过注意对象车辆判定部判定为存在注意对象车辆的情况下,在通过完成判定部判定为所有的注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对出库车辆的出库开始指示。
8、根据这样的构成,对出库对象空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响出库车辆的出库的注意对象空间进行设定,在注意对象空间中存在出库入库中的注意对象车辆的情况下,在判定为注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对出库车辆的出库开始指示。因此,与在出库对象空间的周围的所有的出库入库完成之前不进行出库开始指示的情况相比,能提高自动代客泊车的停车场利用效率。
9、在上述第二方案的自动泊车系统中,也可以是,还具备路线设定部,该路线设定部基于出库对象空间和停车场地图信息来设定出库车辆前往停车场的出口的出库路线,注意对象空间设定部基于出库路线和停车场地图信息来设定注意对象空间。
10、根据这样的构成,考虑出库车辆的出库路线来设定注意对象空间,因此,能不将其他车辆的出库入库不与出库路线发生干扰的泊车空间包括在注意对象空间中,从而能进行适当的注意对象空间的设定。
11、在上述第二方案的自动泊车系统中,注意对象空间设定部也可以将邻接于与停车场的行驶路相接的出库对象空间的泊车空间中沿着出库路线的方向的泊车空间设定为注意对象空间,不将邻接于与停车场的行驶路相接的出库对象空间的泊车空间中不沿着出库路线的方向的泊车空间设定为注意对象空间。
12、根据这样的构成,不将邻接于与停车场的行驶路相接的出库对象空间的泊车空间中的被认为对出库路线的影响低的不沿着出库路线的方向的泊车空间设定为注意对象空间,因此,无需等待与影响低的泊车空间相关联的其他车辆的出库入库的完成,从而能谋求停车场利用效率的提高。
13、在上述第二方案的自动泊车系统中,注意对象车辆中也可以包括退避车辆,该退避车辆是暂时地退避至注意对象空间或从注意对象空间暂时地退避至停车场的行驶路的自动驾驶车辆。
14、根据这样的构成,能通过将退避车辆包括在注意对象车辆中来抑制与注意对象空间相关的退避车辆对出库车辆的出库造成影响。
15、在上述第二方案的自动泊车系统中,注意对象车辆中也可以不包括位于出库车辆的出库路线上并向远离出库路线的方向退避的退避车辆。
16、根据这样的构成,对于向远离出库路线的方向退避的退避车辆,认为退避车辆对出库车辆的出库造成影响的可能性低,因此,能通过不将该退避车辆包括在注意对象车辆中来谋求停车场利用效率的提高。
17、本发明的第三方案的自动泊车系统的控制方法是一种被配置为进行使自动驾驶车辆自动地泊车于从停车场内的多个泊车空间中设定的目标泊车空间的自动代客泊车的自动泊车系统的控制方法。控制方法包括:获取包括停车场内的自动驾驶车辆的位置信息和自动驾驶车辆的出库入库信息的车辆信息;基于入库车辆的目标泊车空间和包括停车场的入口位置信息的停车场地图信息来设定注意对象空间,其中,所述入库车辆是成为自动代客泊车的入库对象的自动驾驶车辆,所述注意对象空间是目标泊车空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响入库车辆的入库的泊车空间;基于停车场地图信息和车辆信息来判定在注意对象空间中是否存在作为出库入库中的自动驾驶车辆的注意对象车辆;在判定为存在注意对象车辆的情况下,基于停车场地图信息和车辆信息来判定所有的注意对象车辆的入库或从泊车空间的脱离是否完成了;以及在判定为存在注意对象车辆的情况下,在判定为所有的注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对入库车辆的入库开始指示。
18、根据这样的构成,对目标泊车空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响入库车辆的入库的注意对象空间进行设定,在注意对象空间中存在出库入库中的注意对象车辆的情况下,在判定为注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对入库车辆的入库开始指示。因此与在目标泊车空间的周围的所有的出库入库完成之前不进行入库开始指示的情况相比,能提高自动代客泊车的停车场利用效率。
19、本发明的第四方案的自动泊车系统的控制方法是一种被配置为进行使自动驾驶车辆自动地泊车于从停车场内的多个泊车空间中设定的目标泊车空间的自动代客泊车的自动泊车系统的控制方法。控制方法包括:获取包括停车场内的自动驾驶车辆的位置信息和自动驾驶车辆的出库入库信息的车辆信息;基于出库车辆所泊车的出库对象空间和包括停车场的出口位置信息的停车场地图信息来设定注意对象空间,其中,所述出库车辆是成为自动代客泊车的出库对象的自动驾驶车辆,所述注意对象空间是出库对象空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响出库车辆的出库的泊车空间;基于停车场地图信息和车辆信息来判定在注意对象空间中是否存在作为出库入库中的自动驾驶车辆的注意对象车辆;在判定为存在注意对象车辆的情况下,基于停车场地图信息和车辆信息来判定所有的注意对象车辆的入库或从泊车空间的脱离是否完成了;以及在判定为存在注意对象车辆的情况下,在判定为所有的注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对出库车辆的出库开始指示。
20、根据这样的构成,对出库对象空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响出库车辆的出库的注意对象空间进行设定,在注意对象空间中存在出库入库中的注意对象车辆的情况下,在判定为注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对出库车辆的出库开始指示。因此,与在出库对象空间的周围的所有的出库入库完成之前不进行出库开始指示的情况相比,能提高自动代客泊车的停车场利用效率。
21、本发明的第五方案的非暂时性存储介质是一种储存有命令的非暂时性存储介质,该命令是能由包括一个或多个处理器的服务器执行的、使服务器动作来进行使自动驾驶车辆自动地泊车于从停车场内的多个泊车空间中设定的目标泊车空间的自动代客泊车的命令,并且该命令使包括所述一个或多个处理器的所述服务器执行以下的功能。所述功能包括:获取包括停车场内的自动驾驶车辆的位置信息和自动驾驶车辆的出库入库信息的车辆信息;基于入库车辆的目标泊车空间和包括停车场的入口位置信息的停车场地图信息来设定注意对象空间,其中,所述入库车辆是成为停车场的入库对象的自动驾驶车辆,所述注意对象空间是目标泊车空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响入库车辆的入库的泊车空间;基于停车场地图信息和车辆信息来判定在注意对象空间中是否存在作为出库入库中的自动驾驶车辆的注意对象车辆;在判定为存在注意对象车辆的情况下,基于停车场地图信息和车辆信息来判定所有的注意对象车辆的入库或从泊车空间的脱离是否完成了;以及在判定为存在注意对象车辆的情况下,在判定为所有的注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对入库车辆的入库开始指示。
22、根据这样的构成,对目标泊车空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响入库车辆的入库的注意对象空间进行设定,在注意对象空间中存在出库入库中的注意对象车辆的情况下,在判定为注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对入库车辆的入库开始指示。因此,与在目标泊车空间的周围的所有的出库入库完成之前不进行入库开始指示的情况相比,能提高自动代客泊车的停车场利用效率。
23、本发明的第六方案的非暂时性存储介质是一种储存有命令的非暂时性存储介质,该命令是能由包括一个或多个处理器的服务器执行的、使服务器动作来进行使自动驾驶车辆自动地泊车于从停车场内的多个泊车空间中设定的目标泊车空间的自动代客泊车的命令,并且该命令使包括所述一个或多个处理器的所述服务器执行以下的功能。所述功能包括:获取包括停车场内的自动驾驶车辆的位置信息和自动驾驶车辆的出库入库信息的车辆信息;基于出库车辆所泊车的出库对象空间和包括停车场的出口位置信息的停车场地图信息来设定注意对象空间,其中,所述出库车辆是成为停车场的出库对象的自动驾驶车辆,所述注意对象空间是出库对象空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响出库车辆的出库的泊车空间;基于停车场地图信息和车辆信息来判定在注意对象空间中是否存在作为出库入库中的自动驾驶车辆的注意对象车辆;在判定为存在注意对象车辆的情况下,基于停车场地图信息和车辆信息来判定所有的注意对象车辆的入库或从泊车空间的脱离是否完成了;以及在判定为存在注意对象车辆的情况下,在判定为所有的注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对出库车辆的出库开始指示。
24、根据这样的构成,对出库对象空间的周围的泊车空间中若存在出库入库中的其他车辆则会影响出库车辆的出库的注意对象空间进行设定,在注意对象空间中存在出库入库中的注意对象车辆的情况下,在判定为注意对象车辆的入库或从泊车空间的脱离完成了之后,进行对出库车辆的出库开始指示。因此,与在出库对象空间的周围的所有的出库入库完成之前不进行出库开始指示的情况相比,能提高自动代客泊车的停车场利用效率。
25、根据本发明的各方案,能提高自动代客泊车的停车场利用效率。
- 还没有人留言评论。精彩留言会获得点赞!