载车平台及包含其的换电站的制作方法
1.本实用新型涉及电动车辆的换电领域,特别涉及一种载车平台及包含其的换电站。
背景技术:
2.换电站用于对电动车辆进行更换电池,电动车辆驶入换电站的载车平台并可靠定位后,由换电设备对电动车辆进行换电,换电完成后电动车辆驶出载车平台。
3.电动车辆的车轮将停靠在车轮定位装置上,车轮通过在车轮定位装置上位置的调节,从而来适用不同车型实现可靠定位。但是,在现有技术中,车轮定位装置一般都固定设置在载车平台上,位置调节非常不方便,且使得载车平台仅能够适用某些特定类型的车辆,载车平台的适配范围较窄。
4.另外,现有技术中即便有将车轮定位装置设置为相对于载车平台的位置可调的载车平台,其中,为了增大载车平台的适配范围,对驱动部具有较高的要求,使得载车平台的成本较高。
技术实现要素:
5.本实用新型要解决的技术问题是为了克服现有技术中载车平台的车型适配范围对驱动部要求高的缺陷,提供一种载车平台及包含其的换电站。
6.本实用新型是通过下述技术方案来解决上述技术问题:
7.一种载车平台,包括平台本体、车轮定位装置和水平移动机构,所述车轮定位装置设置于所述平台本体上,所述水平移动机构用于驱动所述车轮定位装置水平移动,所述平台本体包括移动部和固定部,所述车轮定位装置设置在所述移动部上;
8.所述水平移动机构包括驱动部和连杆组件,所述驱动部的固定端设置在所述固定部上,所述驱动部的伸出端设置于所述连杆组件的滑槽内,所述连杆组件设置滑槽的端部铰接于所述固定部,所述连杆组件的另一端可转动连接于所述移动部;
9.其中,所述水平移动机构被配置为:当所述驱动部沿伸出方向伸缩时,所述驱动部的伸出端在所述连杆组件的滑槽中移动,使所述连杆组件带动所述移动部沿所述伸出方向相对于所述固定部水平移动,且所述移动部水平移动的距离大于所述驱动部的伸出行程。
10.在本方案中,通过驱动部驱动车轮定位装置移动,使得车轮定位装置能够在平台本体上移动并调节车轮定位装置在平台本体上的具体位置,从而能够对不同轴距尺寸的车辆的车轮停靠位置进行调节并实现车辆位置精确定位,具有较高的灵活性,降低了换电站的建设成本,总体上降低了换电成本。另外,通过驱动部与滑槽配合,使驱动部通过滑槽推动连杆组件,以带动移动部相对于所述固定部水平移动,驱动部的伸出端伸出时,在连杆组件的作用下能够实现平台本体的移动,进而实现车轮定位装置水平移动,且移动部水平移动的距离大于所述驱动部的伸出行程,从而能够以较少的驱动部伸出行程获得较多的移动部水平移动量。相较于现有技术,在实现移动部同等的水平移动距离的情况下,本技术能够
降低对驱动部的驱动行程要求。
11.优选地,所述驱动部的伸出方向沿预设的车辆前后方向,所述水平移动机构设置于所述平台本体的下表面,所述车轮定位装置设置于所述移动部的上表面。
12.在本方案中,驱动部的伸出方向与预设的车辆前后方向一致,有利于较为方便且可靠地将车轮定位装置调整到所需的位置,同时还利于提高驱动部的驱动效率,以进一步降低对驱动部的要求,以及进一步减少载车平台占用的空间。另外,水平移动机构设置于平台本体的下表面,利用了平台本体底部的空间,提高了空间利用率,且不会对移动部上表面的车轮定位装置干涉,而无需另外预留空间来设置水平移动机构,从而有利于进一步减少载车平台占用的空间。
13.优选地,所述移动部水平移动的距离与所述驱动部的伸出行程之间的比值范围为1.25~2。
14.在本方案中,在有限的布局范围内,驱动部的伸出端伸出时,移动部水平移动的距离要高达驱动部的伸出端的1.25~2倍,从而能够进一步降低对驱动部的要求,且能够进一步保证以较少的驱动部伸出行程获得较多的移动部水平移动,且采用适当范围的伸出行程比,便于较低要求的驱动部将完全伸展的连杆组件收缩回初始位置。
15.优选地,所述连杆组件包括位于首端的第一连杆和位于尾端的第二连杆,所述第一连杆的一端可转动连接于所述固定部,所述第一连杆的另一端与所述第二连杆的一端铰接连接,且所述第二连杆的另一端可转动连接于所述移动部,所述滑槽设置于所述第一连杆内;
16.其中,所述驱动部的伸出端作用于所述滑槽,以向所述第一连杆施加朝向所述伸出方向的作用力。
17.在本方案中,驱动部的伸出端作用于第一连杆,使得第一连杆相对于相对于固定部旋转,带动第二连杆转动,进而带动移动部移动。水平移动机构采用包含连杆组件的结构,结构简单,在平台本体上占用的空间较小。
18.优选地,所述驱动部和所述第二连杆位于所述第一连杆的不同侧,且当所述驱动部的伸出端处于初始状态时,所述第一连杆和所述第二连杆之间的夹角小于90
°
;和/或,所述驱动部和所述第二连杆位于所述第一连杆的不同侧,且当所述驱动部的伸出端处于完全伸出状态时,所述第一连杆和所述第二连杆之间的夹角大于或等于90
°
。
19.在本方案中,采用上述设置,能够在有限的空间内,使得连杆组件具有较大的运动范围,进而能够保证车轮定位装置的位置具有较大的可调整范围。
20.优选地,所述驱动部的伸出端的侧壁连接有凸出部,所述凸出部卡设在所述滑槽内沿所述滑槽可滑动,所述滑槽为凹槽或通槽。
21.在本方案中,通过设置凸出部,便于实现驱动部与第一连杆的配合以进行力的传递,且结构简单,有利于简化水平移动机构的结构,进而有利于简化载车平台的结构,滑槽设置为凹槽则可增加第一连杆的强度。
22.优选地,当所述驱动部的伸出端处于初始状态时,所述驱动部的伸出端伸入所述滑槽中靠近所述第一连杆与所述固定部连接处的一端。
23.在本方案中,采用上述结构设置,相较于位于第一连杆的中部,能够以较小的驱动部行程实现较大范围的水平部的移动。
24.优选地,所述载车平台还包括检测机构,所述载车平台被配置为通过所述移动部的移动改变所述检测机构的检测值,以根据所述检测机构的检测值实现所述车轮定位装置的移动或停止移动。
25.在本方案中,通过检测机构来进行检测并控制车轮定位装置,实现对车轮定位装置移动到位的精确控制,大大提高了包含该载车平台的安全稳定性,也有利于保证车轮定位装置对车轮进行定位的定位精度。
26.优选地,所述检测机构为电子尺,所述电子尺的一端连接于所述固定部,所述电子尺的另一端固定于所述移动部,所述电子尺的另一端通过连接件固定于所述移动部,所述连接件为弯折结构,所述连接件上设有固定孔,所述电子尺的另一端伸入并连接在所述固定孔内。
27.在本方案中,采用电子尺实现检测,检测精度较高,稳定性高;且体积小,结构简单,安装设置方便,成本低。通过连接件能够较为方便地实现电子尺的另一端与移动部的安装,且连接件的结构可以设置地比较简单。
28.优选地,所述固定部设置有导向部,所述移动部设置有滑动组件,所述滑动组件在所述导向部内移动,使所述移动部沿所述导向部的水平导向方向移动,所述水平导向方向沿预设的车辆前后方向。
29.在本方案中,导向部能够对移动部相对于固定部的移动起到导向作用,能够保证移动部移动的稳定性和可靠性,进而有利于可靠地对车轮定位装置的位置进行调整。
30.优选地,所述固定部的导向部为用于避让所述移动部的通孔,所述移动部的滑动组件包括依次连接的第一板、第二板和第三板,所述第一板和所述第三板分别位于所述固定部的上表面和下表面,所述第二板位于所述通孔内,所述车轮定位装置设置于所述第一板的上表面,所述第三板用于与所述连杆组件连接。
31.优选地,在所述固定部与所述移动部的接触区设置有滚动部件,所述滚动部件露出于所述固定部的表面。
32.在本方案中,通过滚动部件滚动配合以实现车轮定位装置沿预设的车辆前后方向移动,通过滚动部件使得车轮定位装置在移动时摩擦力非常小,且对车轮不易产生摩擦和损耗,能够非常方便地实现移动,移动精度也较高,能够实现对车辆的精确定位。
33.优选地,所述载车平台还包括举升装置,所述举升装置连接于所述平台本体的底部并用于举升承载的车辆;其中,所述车轮定位装置用于承载车辆的左前轮。
34.在本方案中,通过举升装置能够将停靠在载车平台的车辆向上顶起,使得车辆下方的空间得到增大,便于换电设备进入至车辆的下方并对车辆上的电池包进行更换操作,大大提高了换电站的安全稳定性。另外,由于左前轮的停靠位置与驾驶员最近,车辆在驶入载车平台时更加有利于司机将车辆的左前轮驶入至车轮定位装置上,从而能够更加方便地实现车辆的精确定位。
35.优选地,所述驱动部包括气缸、液压缸或电推杆。
36.在本方案中,采用上述结构设置,可以根据空间、成本等设置需求选择合适的驱动部,且上述驱动部具有构造简单、工作可靠、易于安装维护的特点。
37.本实用新型还提供一种换电站,其包括上述载车平台。
38.本实用新型的积极进步效果在于:
39.在该载车平台中,通过驱动部驱动车轮定位装置移动,使得车轮定位装置能够在平台本体上移动并调节车轮定位装置在平台本体上的具体位置,从而能够对不同轴距尺寸的车辆的车轮停靠位置进行调节并实现车辆位置精确定位,具有较高的灵活性,降低了换电站的建设成本,总体上降低了换电成本。另外,通过驱动部与滑槽配合,使驱动部通过滑槽推动连杆组件,以带动移动部相对于所述固定部水平移动,驱动部的伸出端伸出时,在连杆组件的作用下能够实现平台本体的移动,进而实现车轮定位装置水平移动,且移动部水平移动的距离大于所述驱动部的伸出行程,从而能够以较少的驱动部伸出行程获得较多的移动部水平移动量。相较于现有技术,在实现移动部同等的水平移动距离的情况下,本技术能够降低对驱动部的驱动行程要求。
附图说明
40.图1为本实用新型一优选实施例的载车平台的结构示意图。
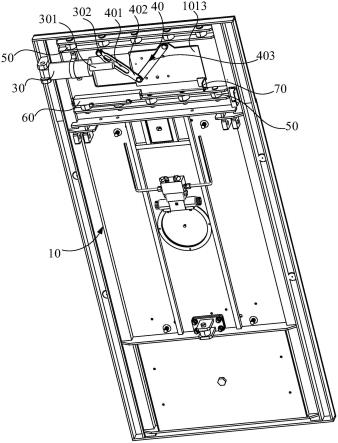
41.图2为本实用新型一优选实施例的载车平台的立体结构示意图,其中,驱动部的伸出端处于部分伸出状态。
42.图3为本实用新型一优选实施例的载车平台的另一结构示意图,其中,驱动部的伸出端处于部分伸出状态。
43.图4为本实用新型一优选实施例的载车平台的另一结构示意图,其中,驱动部的伸出端处于初始状态。
44.图5为本实用新型一优选实施例的载车平台的另一结构示意图,其中,驱动部的伸出端处于完全伸出状态。
45.图6为本实用新型一优选实施例的载车平台的部分结构示意图,其中,图中未示出第三板和连杆组件。
46.图7为本实用新型一优选实施例的载车平台的另一部分结构示意图,其中,图中未示出部分固定部。
47.图8为本实用新型一优选实施例的载车平台的另一部分结构示意图,其中,图中未示出第一板。
48.图9为本实用新型一优选实施例的载车平台的另一部分结构示意图,其中,图中示出了举升装置。
49.附图标记说明:
50.10平台本体
51.101移动部
52.1011第一板
53.1012第二板
54.1013第三板
55.102固定部
56.1021导向部
57.20车轮定位装置
58.201限位块
59.30驱动部
60.301伸出端
61.302凸出部
62.40连杆组件
63.401滑槽
64.402第一连杆
65.403第二连杆
66.50滚动部件
67.60电子尺
68.70连接件
69.80举升机构
70.90举升支撑机构
具体实施方式
71.下面通过实施例的方式进一步说明本实用新型,但并不因此将本实用新型限制在的实施例范围之中。
72.如图1-9所示,本实施例揭示一种载车平台及包含其的换电站,该换电站用于对待换电车辆进行换电,其中,载车平台用于承载待换电车辆。当需要换电时,待换电车辆驶入载车平台,车轮定位装置20能够对待换电车辆进行定位。待换电完成后,待换电车辆可完成后,待换电车辆驶离载车平台。
73.具体地,参照如图1-8予以理解,载车平台包括平台本体10、车轮定位装置20和水平移动机构,车轮定位装置20设置于平台本体10上,水平移动机构用于驱动车轮定位装置20水平移动,平台本体10包括移动部101和固定部102,车轮定位装置20设置在移动部101上。水平移动机构包括驱动部30和连杆组件40,驱动部30的固定端设置在固定部102上,驱动部30的伸出端301设置于连杆组件40的滑槽401内,连杆组件40设置滑槽401的端部铰接于固定部102,连杆组件40的另一端可转动连接于移动部101。其中,水平移动机构被配置为:当驱动部30沿伸出方向伸缩时,驱动部30的伸出端301在连杆组件40的滑槽401中移动,使连杆组件40带动移动部101沿伸出方向相对于固定部102水平移动,且移动部101水平移动的距离大于驱动部30的伸出行程。
74.在本实施方式中,通过驱动部30驱动车轮定位装置20移动,使得车轮定位装置20能够在平台本体10上移动并调节车轮定位装置20在平台本体10上的具体位置,从而能够对不同轴距尺寸的车辆的车轮停靠位置进行调节并实现车辆位置精确定位,具有较高的灵活性,降低了换电站的建设成本,总体上降低了换电成本。另外,通过驱动部30与滑槽401配合,使驱动部30通过滑槽401推动连杆组件40,以带动移动部101相对于固定部102水平移动,驱动部30的伸出端301伸出时,在连杆组件40的作用下能够实现平台本体10的移动,进而实现车轮定位装置20水平移动,且移动部101水平移动的距离大于驱动部30的伸出行程,从而能够以较少的驱动部30伸出行程获得较多的移动部101水平移动量。相较于现有技术,在实现移动部101同等的水平移动距离的情况下,本技术能够降低对驱动部30的驱动行程要求。
75.在优选的实施例中,驱动部30的伸出方向沿预设的车辆前后方向m(如图1示意性
示出的),水平移动机构设置于平台本体10的下表面,车轮定位装置20设置于移动部101的上表面。如此设置,驱动部30的伸出方向与预设的车辆前后方向一致,有利于较为方便且可靠地将车轮定位装置20调整到所需的位置,同时还利于提高驱动部30的驱动效率,以进一步降低对驱动部30的要求,以及进一步减少载车平台占用的空间。另外,水平移动机构设置于平台本体10的下表面,利用了平台本体10底部的空间,提高了空间利用率,且不会对移动部101上表面的车轮定位装置20干涉,而无需另外预留空间来设置水平移动机构,从而有利于进一步减少载车平台占用的空间。
76.需要说明的是,驱动部30的伸出方向并不局限于沿预设的车辆前后方向m,实际上,只要能够使得驱动部30的伸出端301能够通过连杆组件40的滑槽401作用于移动部101,进而带动车轮定位装置20移动,最终能够实现将车轮定位装置20的位置调整到所需要的位置即可。
77.为了能够进一步降低对驱动部30的要求,且能够进一步保证以较少的驱动部30伸出行程获得较多的移动部101水平移动,在优选的实施例中,将移动部101水平移动的距离与驱动部30的伸出行程之间的比值范围为1.25~2。
78.其中,将移动部101水平移动的距离与驱动部30的伸出行程之间的比值设置在上述范围内,在有限的布局范围内,驱动部30的伸出端301伸出时,移动部101水平移动的距离要高达驱动部30的伸出端301的1.25~2倍,从而能够进一步降低对驱动部30的要求,且能够进一步保证以较少的驱动部30伸出行程获得较多的移动部101水平移动,且采用适当范围的伸出行程比,便于较低要求的驱动部将完全伸展的连杆组件收缩回初始位置。
79.需要说明的是,本实施例中,移动部101水平移动的距离为驱动部30的伸出端301的2倍。但是,在其他可替代实施例中,移动部101水平移动的距离与驱动部30的伸出端301之间的关系可以设置为上述范围内的任意数值。
80.如图2-5、图7-8所示,在优选的实施例中,连杆组件40包括位于首端的第一连杆402和位于尾端的第二连杆403,第一连杆402的一端可转动连接于固定部102,第一连杆402的另一端与第二连杆403的一端铰接连接,且第二连杆403的另一端可转动连接于移动部101,滑槽401设置于第一连杆402内;其中,驱动部30的伸出端301作用于滑槽401,以向第一连杆402施加朝向伸出方向的作用力。
81.在此,将连杆组件40设置为包括第一连杆402和第二连杆403,驱动部30的伸出端301作用于第一连杆402,使得第一连杆402相对于相对于固定部102旋转,带动第二连杆403转动,进而带动移动部101移动。水平移动机构采用包含连杆组件40的结构,结构简单,在平台本体10上占用的空间较小。
82.需要说明的是,在本实施例中,在保证第一连杆402强度的基础上。滑槽401直接设置在第一连杆402的端面上,沿着第一连杆402的长度方向延伸,且滑槽401贯穿第一连杆402。但是,滑槽401的设置方式并不局限于上述设置方式,在其他可替代的实施例中,也可将滑槽401设置为位于第一连杆402的侧壁,当然也可以设置为其他结构形式,只要能够实现驱动部30的伸出端301能够通过滑槽401推动第一连杆402和第二连杆403运动,进而实现移动部101带动车轮定位装置20移动。
83.相应地,驱动部30的伸出端301与滑槽401的配合方式也不作具体限制,只要能够将伸出端301的运动通过连杆组件40的滑槽401传递到连杆组件40的其他部分,并能够作用
到移动部101使得移动部101能够带动车轮定位装置20移动到所需位置即可。作为优选的实施例,如图7-8所示,驱动部30的伸出端301的侧壁连接有凸出部302,凸出部302卡设在滑槽401内沿滑槽401可滑动,滑槽401为凹槽或通槽。其中,通过设置凸出部302,便于实现驱动部30与第一连杆402的配合以进行力的传递,且结构简单,有利于简化水平移动机构的结构,进而有利于简化载车平台的结构。其中,滑槽401设置为凹槽则可增加第一连杆402的强度。
84.图2-5示出了驱动部30的伸出端301处于不同状态。图2-3和图5示出了驱动部30的伸出端301处于不同伸出程度的伸出状态。其中,根据不同设置需求,图5可设定为驱动部30的伸出端301处于完全伸出状态或接近完全伸出的状态,而在本实施例中,图5示出的为驱动部30的伸出端301处于完全伸出状态,此时移动部101相对于固定部102处于完全伸出位置;图2示出的伸出状态中驱动部30的伸出端301伸出的长度大于图3示出的伸出状态中驱动部30的伸出端301伸出的长度,为便于描述,将图2示出的伸出状态简称为第一伸出状态,将图3示出的伸出状态简称为第二伸出状态。图4示出了驱动部30的伸出端301处于初始状态,此时移动部101相对于固定部102处于初始位置。
85.从图2-3和图5中可以看出,驱动部30和第二连杆403位于第一连杆402的不同侧,且当驱动部30的伸出端301处于完全伸出状态时,第一连杆402和第二连杆403之间的夹角大于90
°
,且当驱动部30的伸出端301处于初始状态时,第一连杆402和第二连杆403之间的夹角小于90
°
。能够在有限的空间内,使得连杆组件40具有较大的运动范围,进而能够保证车轮定位装置20的位置具有较大的可调整范围。
86.在可替代的实施例中,当驱动部30的伸出端301处于完全伸出状态时,根据不同的设计需求,也可将第一连杆402和第二连杆403之间的夹角设为90
°
。当驱动部30的伸出端301处于初始状态和完全伸出状态之间的位置时,第一连杆402和第二连杆403之间的夹角可均设置为锐角,也可根据实际需求,在邻近完全伸出状态时,将第一连杆402和第二连杆403之间的夹角设置为大于或等于90
°
。
87.参照图4予以理解,当驱动部30的伸出端301处于初始状态时,驱动部30的伸出端301伸入滑槽401中靠近第一连杆402与固定部102连接处的一端。相较于位于第一连杆402的中部,能够以较小的驱动部30行程实现较大范围的水平部的移动。
88.进一步地,在本实施例中,驱动部30设置为气缸,如此,驱动部30具有构造简单、工作可靠、易于安装维护的特点。在其他可替代的实施例中,可以根据空间、成本等设置需求选择合适的驱动部30,如也可将驱动部30设置为液压缸或电推杆。
89.下面结合图1-8,对移动部101相对于固定部102实现水平移动的具体结构进行阐述。
90.固定部102设置有导向部1021,移动部101设置有滑动组件,滑动组件在导向部1021内移动,使移动部101沿导向部1021的水平导向方向移动,水平导向方向沿预设的车辆前后方向。其中,导向部1021能够对移动部101相对于固定部102的移动起到导向作用,能够保证移动部101移动的稳定性和可靠性,进而有利于可靠地对车轮定位装置20的位置进行调整。
91.在优选的实施例中,固定部102的导向部1021为用于避让移动部101的通孔,移动部101的滑动组件包括依次连接的第一板1011、第二板1012和第三板1013,第一板1011和第
三板1013分别位于固定部102的上表面和下表面,第二板1012位于通孔内,车轮定位装置20设置于第一板1011的上表面,第三板1013用于与连杆组件40连接。
92.在另一优选的实施例中,为了减小车轮定位装置20在移动时的摩擦力,在固定部102与移动部101的接触区设置有滚动部件50,滚动部件50露出于固定部102的表面。其中,通过滚动部件50滚动配合以实现车轮定位装置20沿预设的车辆前后方向移动,通过滚动部件50使得车轮定位装置20在移动时摩擦力非常小,且对车轮不易产生摩擦和损耗,能够非常方便地实现移动,移动精度也较高,能够实现对车辆的精确定位。
93.如图2-8所示,第一板1011与固定部102的接触区域内设置有滚动部件50,且滚动部件50的数量为多个,多个滚动部件50分别位于车轮定位装置20的两端并沿预设的车辆前后方向间隔设置在平台本体10上。
94.在本实施例中,滚动部件50为滚轮。滚轮的轮轴垂直于车辆行驶方向(对应于预设的车辆前后方向),滚轮将可以沿预设的车辆前后方向滚动,通过滚轮将利于车轮定位装置20在平台本体10上沿预设的车辆前后方向移动,便于调整车轮定位装置20以实现对不同轴距尺寸的车辆车轮停靠位置调节以及车轮的精确定位,且结构简单,安装设置方便。
95.当然,在其他实施例中,滚动部件50也可以设置为滚珠。通过滚珠抵靠于车轮定位装置20的底面,与上述对应,该设置也利于车轮定位装置20在平台本体10上沿预设的车辆前后方向移动,便于调整车轮定位装置20以实现对不同轴距尺寸的车辆车轮停靠位置调节以及车轮的精确定位,且结构简单,安装设置方便。
96.在可替代的实施例中,也可在第三板1013与固定部102的接触区域内设置滚动部件50,或同时在第一板1011与固定部102的接触区域、第三板1013与固定部102的接触区域设置滚动部件50。
97.在另一优选的实施例中,载车平台还包括检测机构,载车平台被配置为通过移动部101的移动改变检测机构的检测值,以根据检测机构的检测值实现车轮定位装置20的移动或停止移动。其中,通过检测机构来进行检测并控制车轮定位装置20,实现对车轮定位装置20移动到位的精确控制,大大提高了包含该载车平台的安全稳定性,也有利于保证车轮定位装置20对车轮进行定位的定位精度。
98.载车平台能够检测出不同型号的车辆并在检测机构上生成对应的内部设定值。车辆在进入车轮定位装置20之前,载车平台检测不同型号的车辆,通过驱动部30的动作来控制车轮定位装置20的移动,通过车轮定位装置20的移动以改变检测机构的检测值,使得检测值与检测机构的内部设定值进行比较来用于控制驱动部30的关闭,以实现车轮定位装置20停止移动,从而实现车轮定位装置20对车辆的精确定位。
99.例如,检测到车辆的型号,根据车辆型号对应的轴距尺寸调整设定检测值为该车辆型号的设定值,当检测值小于内部设定值时,驱动部30将用于控制车轮定位装置20沿预设车辆的前进方向移动;当检测值大于内部设定值时,驱动部30将用于控制车轮定位装置20沿预设车辆的后退方向移动;当检测值等于内部设定值时,检测机构将发出信号并控制驱动部30的关闭,以实现车轮定位装置20停止移动。通过检测机构来进行检测并控制车轮定位装置20,实现对车轮定位装置20移动到位的精确控制,大大提高了换电站的安全稳定性。
100.其中,通过车轮定位装置20的移动以改变检测机构的检测值,检测值可以为电阻
值、电压值、压力值、磁力值、热力值等。
101.在本实施例中,检测机构连接于平台本体10的底部。通过将检测机构设置在平台本体10的底部,使得检测机构不占用平台本体10上的空间,有效避免发生干涉现象,且安装设置方便。
102.如图2-7所示,在优选的实施例中,检测机构为电子尺60,电子尺60的一端连接于固定部102,电子尺60的另一端固定于移动部101。采用电子尺60实现检测,检测精度较高,稳定性高。另外,电子尺60的体积小,结构简单,安装设置方便,成本低。
103.参照图2-7予以理解,电子尺60的另一端通过连接件70固定于移动部101,连接件70为弯折结构,连接件70上设有固定孔,电子尺60的另一端伸入并连接在固定孔内。通过连接件70能够较为方便地实现电子尺60的另一端与移动部101的安装,且连接件70的结构可以设置地比较简单。
104.更进一步地,如图9所示,载车平台还包括举升装置(图中未示出),举升装置连接于平台本体10的底部并用于举升承载的车辆,举升机构便于将平台本体10举升到适当高度,以便换电机器人从车辆底部的电池安装区对车辆进行换电。
105.具体地,举升装置包括举升机构80和举升支撑机构90。其中,举升机构80的底端固定于换电站内,举升机构80的顶端连接于平台本体10,且举升机构80的举升方向垂直于平台本体10所在的平面,举升机构80用于为平台本体10的升降提供驱动力。举升机构80产生稳定而持续变化的驱动力,驱动平台本体10升降移动,举升机构80的举升方向垂直于平台本体10的平面,使得作用于平台本体10上的驱动力持续而稳定的变化,不会产生迅速的变化而对整个平台本体10产生冲击,举升机构80的驱动力变化更稳定,不会对平台本体10产生冲击,同时也不会造成平台本体10的晃动。
106.举升支撑机构90的底端设置于换电站内,举升支撑机构90的顶端连接于平台本体10,平台本体10升降以带动举升支撑机构90升降运动。如此设置,实现了举升支撑机构90对平台本体10的举升或下降过程中的支撑功能,提高了整个举升装置的刚性和强度,可以满足不同种类的待换电车辆的换电,保证了换电过程的安全可靠。
107.在本实施例中,采用1个或2个液压缸作为举升机构80,采用剪刀架机构作为举升支撑机构90,保证了整个举升装置的刚性和强度,同时也保证了平台本体10在换电过程中的平稳,且采用单向液压缸,举升同样的高度对液压缸的驱动力性能要求更低,降低了成本,提高了举升机构80的驱动力效率,当然也可以采用平行设置于剪刀架机构的剪刀杆的双向缸作为举升机构。
108.在其他可替代的实施例中,举升装置如果只采用液压缸而没有举升支撑机构90,则采用3个液压缸或3个以上液压缸也能够实现对平台本体10的稳定上升或下降。
109.其中,车轮定位装置20用于承载车辆的左前轮。其中,通过举升装置能够将停靠在载车平台的车辆向上顶起,使得车辆下方的空间得到增大,便于换电设备进入至车辆的下方并对车辆上的电池包进行更换操作,大大提高了换电站的安全稳定性。另外,由于左前轮的停靠位置与驾驶员最近,车辆在驶入载车平台时更加有利于司机将车辆的左前轮驶入至车轮定位装置20上,从而能够更加方便地实现车辆的精确定位。
110.如图1所示,车轮定位装置20包括两个限位块201,两个限位块201均安装于第一板1011上,两个限位块201分别用于对车辆的车轮向前和车轮向后的两个运动趋势进行限位,
以使车辆的车轮被限位在两个限位块201之间。通过两个限位块201分别对车轮向前和车轮向后的两个运动趋势进行限位,有效避免了车辆的车轮向前和向后移动,实现对车辆的精确定位,且有效避免在换电操作时车辆发生移位现象,大大提高了换电站的安全稳定性。
111.实际上,载车平台还包括车轮地滚装置(图中未示出),车轮地滚装置设置于平台本体10上并用于承载车辆未被定位的车轮。车轮地滚装置设置在平台本体10上并位于车辆未被定位的车轮的停靠位置上。当车辆的驶入至载车平台上时,车辆的车轮将分别停靠在车轮定位装置20和车轮地滚装置,通过车轮定位装置20对车轮实现定位而不会产生移动,停靠在车轮地滚装置的车轮将能够在车轮地滚装置上进行移动矫正。从而实现车辆精确停靠,精确定位更加方便,更利于电池更换操作的稳定,大大提高了换电站的安全稳定性。
112.在一个实施例中,车轮地滚装置上具有滚筒。通过滚筒将利于车轮在车轮地滚装置上移动,便于调整车轮以实现对车辆的精确定位。在另一个实施例中,车轮地滚装置上具有滚轮或者滚珠。通过滚轮或者滚珠将利于车轮在车轮地滚装置上移动,便于调整车轮以实现对车辆的精确定位,且结构简单,安装设置方便。
113.其中,车轮定位装置20定位一个车轮,车轮地滚装置用于承载三个车轮。车轮定位装置20用于对车轮的前后方向位置和/或左右方向位置进行限位。通过车轮定位装置20对车辆的一个车轮四周的运动趋势进行限位,从而实现对这一个车轮实现精确定位,另外三个车轮将在车轮地滚装置上进行移动矫正。从而实现整个车辆的精确停靠在载车平台上,精确定位更加方便,更利于电池更换操作的稳定,大大提高了换电站的安全稳定性。
114.其中,车轮定位装置20的数量为一个,如前,该车轮定位装置20用于承载车辆的左前轮。车轮地滚装置的数量为三个并分别用于承载车辆的右前轮和两个后轮。当然,在其他可替代的实施例中,车轮定位装置20和车轮地滚装置的数量以及设置位置可以不做限定,可以根据具体需要情况而相应设置。
115.虽然以上描述了本实用新型的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本实用新型的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本实用新型的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1