基于超声波雷达的倒车盲区监测方法及系统与流程
本发明属于车辆领域,涉及倒车盲区监测技术,具体是基于超声波雷达的倒车盲区监测方法及系统。
背景技术:
1、车辆是“车”与车的单位“辆”的总称。所谓车,是指陆地上用轮子转动的交通工具;所谓辆,来源于古代对车的计量方法。那时的车一般是两个车轮,故车一乘即称一两,后来才写作辆。由此可见,车辆的本义是指本身没有动力的车,用马来牵引叫马车,用人来拉或推叫人力车。随着科学技术的发展,又有了用蒸汽机来牵引的汽车等等。现有技术中,虽然部分车辆配备了360度全景倒车影像,但是仍有部分车辆没有配备360度全景倒车影像,未配备360度全景倒车影像的车辆仍然通过倒车影像或外后视镜进行倒车,倒车影像或外后视镜的倒车方式会存在视野盲区,一旦操作不当极易造成车辆磕碰损伤,甚至影响自己或他人的人身安全,为此,我们提出基于超声波雷达的倒车盲区监测方法及系统。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供基于超声波雷达的倒车盲区监测方法及系统。
2、本发明所要解决的技术问题为:
3、如何在车辆倒车过程中对视野盲区进行全方位监测。
4、本发明的目的可以通过以下技术方案实现:
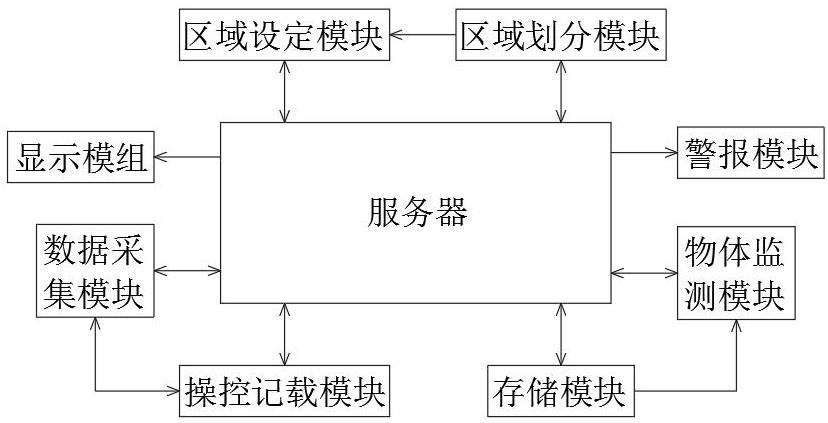
5、基于超声波雷达的倒车盲区监测系统,包括区域划分模块、区域设定模块、显示模组、数据采集模块、操控记载模块、存储模块、物体监测模块、警报模块以及服务器,所述区域划分模块用于对车辆倒车时的视野盲区范围进行划分,划分得到六组视野盲区,所述区域设定模块用于对六组视野盲区的反应时长阈值进行设定,得到视野盲区的反应时长阈值反馈至服务器,所述服务器将视野盲区的反应时长阈值发送至物体监测模块;
6、所述数据采集模块用于采集车辆倒车时转向节的转动方向并发送至服务器,所述服务器将转动方向发送至操控记载模块;所述操控记载模块依据转动方向用于对车辆倒车时的转向情况进行记载,得到车辆倒车时的监测分析区域反馈至服务器,服务器通过超声波雷达技术判断监测分析区域是否存在倒车障碍物,若监测分析区域内不存在倒车障碍物,则不进行任何操作,若监测分析区域内存在倒车障碍物,则所述数据采集模块用于采集车辆倒车时监测分析区域内倒车障碍物的实时物体数据以及车辆倒车时的倒车速度并发送至服务器,所述服务器将实时物体数据和倒车速度发送至物体监测模块;
7、所述存储模块用于存储不同预设物体的预设轮廓图,所述物体监测模块用于对车辆倒车时监测分析区域内倒车障碍物进行监测,生成倒车安全信号、倒车危险信号或与预设物体。
8、进一步地,六组视野盲区包括车正前视野盲区、车正后视野盲区、车左前视野盲区、车右前视野盲区、车左后视野盲区和车右后视野盲区。
9、进一步地,所述区域设定模块的设定过程具体如下:
10、若为车正前视野盲区,则反应时长阈值为α1;
11、若为车左前视野盲区,则反应时长阈值为α2;
12、若为车右前视野盲区,则反应时长阈值为α3;
13、若为车左后视野盲区,则反应时长阈值为α4;
14、若为车右后视野盲区,则反应时长阈值为α5;
15、若为车正后视野盲区,则反应时长阈值为α6;其中,α1、α2、α3、α4、α5和α6均为固定数值的正整数,且0<α6<α5<α4<α3<α2<α1。
16、进一步地,转动方向包括逆时针转动、顺时针转动和无方向转动。
17、进一步地,所述操控记载模块的记载过程具体如下:
18、获取车辆倒车时的转动方向,通过转动方向得到车辆倒车时的倒车方向;
19、依据倒车方向将车辆倒车时经过的视野盲区标定为车辆倒车时的监测分析区域。
20、进一步地,若车辆倒车时转向节的转动方向为逆时针转动,则车正前视野盲区、车正后视野盲区、车右前视野盲区、车左后视野盲区和车右后视野盲区构成监测分析区域;
21、若车辆倒车时转向节的转动方向为顺时针转动,则车正前视野盲区、车正后视野盲区、车左前视野盲区、车左后视野盲区和车右后视野盲区构成监测分析区域;
22、若车辆倒车时转向节的转动方向为无方向转动,则车正后视野盲区构成监测分析区域。
23、进一步地,实时物体数据为监测区域内倒车障碍物的实时运动方向、实时速度、实时位置和实时轮廓图。
24、进一步地,所述物体监测模块的监测过程具体如下:
25、获取监测分析区域内倒车障碍物的实时位置,依据实时位置得到倒车障碍物与车辆的实时间隔距离,而后获取车辆倒车时的安全间隔距离;
26、若实时间隔距离超过安全间隔距离,则生成倒车安全信号;
27、若实时间隔距离未超过安全间隔距离,则获取监测分析区域内倒车障碍物的实时速度值;
28、当实时速度值为零时,则判定倒车障碍物为静态物体,实时间隔距离除以倒车速度得到车辆与倒车障碍物的碰撞时长,获取倒车障碍物所处的视野盲区,依据所处的视野盲区得到对应的反应时长阈值,若碰撞时长小于等于反应时长阈值,则生成倒车危险信号,若碰撞时长大于反应时长阈值,获取静态物体的实时轮廓图,将实时轮廓图与存储模块内预设物体的预设轮廓图进行比对,依据适配的预设轮廓图得到监测分析区域内倒车障碍物对应的预设物体;
29、当实时速度值不为零时,则判定倒车障碍物为动态物体,则获取监测分析区域内倒车障碍物的实时运动方向,若实时运行方向为不断远离,则生成倒车安全信号,若实时运行方向为不断靠近,则获取监测分析区域内倒车障碍物的实时速度,实时速度加上倒车速度得到速度总和,实时间隔距离除以速度总和得到车辆与倒车障碍物的碰撞时长;
30、获取倒车障碍物所处的视野盲区,依据所处的视野盲区得到对应的反应时长阈值;若碰撞时长小于等于反应时长阈值,则生成倒车危险信号,若碰撞时长大于反应时长阈值,则获取动态物体的实时轮廓图,将实时轮廓图与存储模块内预设物体的预设轮廓图进行比对,依据适配的预设轮廓图得到监测分析区域内倒车障碍物对应的预设物体。
31、进一步地,所述物体监测模块将倒车安全信号、倒车危险信号或与预设物体反馈至服务器;
32、若服务器接收到倒车安全信号,则不进行任何操作,若服务器接收到预设物体,则将预设物体发送至显示模组,所述显示模组用于将监测分析区域内的预设物体进行显示;
33、若服务器接收到倒车危险信号,则生成警报指令加载至警报模块,所述警报模块接收到警报指令后发出警报声。
34、基于超声波雷达的倒车盲区监测方法,监测方法具体如下:
35、步骤s101,区域划分模块将车辆倒车时的视野盲区范围进行划分,并通过区域设定模块对六组视野盲区的反应时长阈值进行设定并发送至物体监测模块;
36、步骤s102,数据采集模块采集车辆倒车时转向节的转动方向发送至操控记载模块,操控记载模块依据转动方向对车辆倒车时的转向情况进行记载,得到车辆倒车时的监测分析区域;
37、步骤s103,若监测分析区域内存在倒车障碍物,则利用数据采集模块采集车辆倒车时监测分析区域内倒车障碍物的实时物体数据以及车辆倒车时的倒车速度并发送至物体监测模块;
38、步骤s104,物体监测模块对车辆倒车时监测分析区域内倒车障碍物进行监测,得到倒车安全信号、倒车危险信号或与预设物体。
39、与现有技术相比,本发明的有益效果是:
40、本发明首先通过区域划分模块将车辆倒车时的视野盲区范围进行划分,并通过区域设定模块对六组视野盲区的反应时长阈值进行设定并发送至物体监测模块,同时通过操控记载模块依据转动方向对车辆倒车时的转向情况进行记载,得到车辆倒车时的监测分析区域,若监测分析区域内存在倒车障碍物,则利用物体监测模块对车辆倒车时监测分析区域内倒车障碍物进行监测,得到倒车安全信号、倒车危险信号或与预设物体,本发明在车辆倒车过程中实现对视野盲区的全方位监测。
- 还没有人留言评论。精彩留言会获得点赞!