一种用于APA泊车场景的车位融合方法、系统、存储介质及车辆与流程
本发明涉及自动泊车辅助系统(auto parking assist,apa),特别是涉及一种用于apa泊车场景的车位融合方法、系统、存储介质及车辆。
背景技术:
1、目前apa泊车场景车位融合方法主要为:基于全景式监控影像系统(around viewmonitor,avm)传感器(下称环视传感器)感知泊车环境搜索视觉车位,以及采用超声波雷达(ultrasonic sensor system,uss)传感器感知泊车环境搜索超声车位,然后对该两个获得的车位信息进行融合,获得融合车位信息。
2、但是现有的技术中,所采用的融合方法的逻辑均比较简单。例如在一些例子中,对视觉车位和超声车位进行融合时,只是简单的通过比较其车位坐标信息的大小来选择把其中一个作为最后输出的融合车位,并没有充分的利用其重叠部分的信息,同时也没有考虑超声车位的误差。
3、同时在一些例子中,首先采用超声车位来确定有效车位,但超声波信息点数较少,探测周围的边界不够稳定,无法对车位进行准确识别,其误差波动范围在30cm左右,同时超声波相比视觉探测距离有限,这就导致如果先采用超声车位来确定有效车位,会过滤掉一些有效车位。
4、故现有的技术中,对超声车位和视觉车位进行融合时,其准确性欠佳,会影响泊车的成功率及效率。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种用于apa泊车场景的车位融合方法、系统、存储介质及车辆,可以快速获得准确的融合车位,能够提高泊车的成功率及效率。
2、为解决上述技术问题,作为本发明的一方面,提供一种用于apa泊车场景的车位融合方法,其至少包括如下步骤:
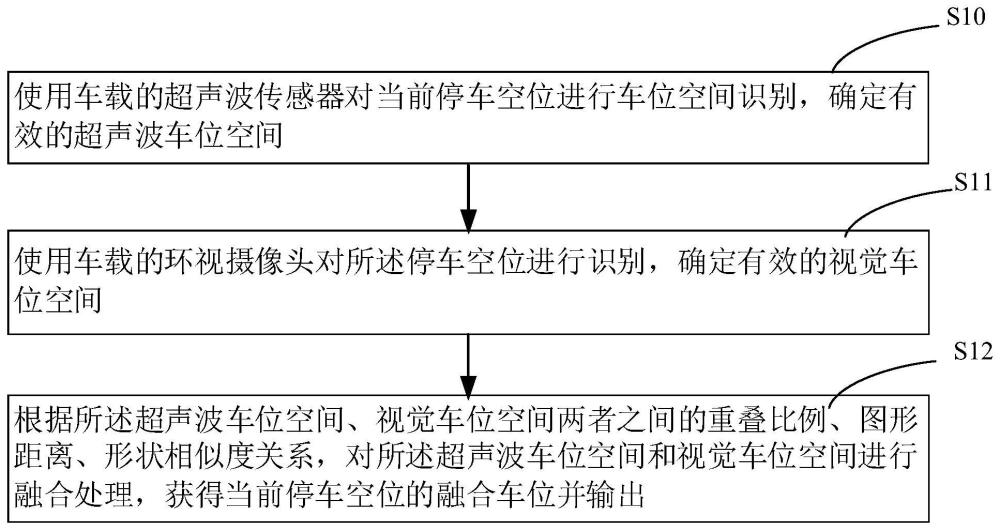
3、使用车载的超声波传感器对当前停车空位进行车位空间识别,确定有效的超声波车位空间;
4、使用车载的环视摄像头对所述停车空位进行识别,确定有效的视觉车位空间;
5、根据所述超声波车位空间、视觉车位空间两者之间的重叠比例、图形距离、形状相似度关系,对所述超声波车位空间和视觉车位空间进行融合处理,获得当前停车空位的融合车位并输出。
6、其中,所述使用车载的超声波传感器对当前停车空位进行车位空间识别,确定有效的超声波车位空间,进一步包括:
7、使用车载的超声波传感器对当前停车空位进行车位空间识别,获取当前停车空位的坐标信息,所述坐标信息至少包括:各顶点的坐标信息、长宽信息;
8、在所述车位空间的尺寸满足预设的最小停车尺寸,且其内无障碍物时,将识别出的车位空间确定为有效的超声波车位空间。
9、其中,所述使用车载的环视摄像头对所述停车空位进行识别,确定有效的视觉车位空间,进一步包括:
10、使用车载的环视摄像头对所述停车空位进行识别,获取当前停车空位的坐标信息,所述坐标信息至少包括:各顶点的坐标信息、长宽信息;
11、在所述车位空间的尺寸满足预设的最小停车尺寸,且其内无障碍物时,将识别出的车位空间确定为有效的视觉车位空间。
12、其中,所述根据所述超声波车位空间、视觉车位空间两者之间的重叠比例、图形距离、形状相似度关系,对所述超声波车位空间和视觉车位空间进行融合处理,获得当前停车空位的融合车位并输出,进一步包括:
13、根据所述有效的超声波车位空间、视觉车位空间的坐标信息,计算两者的相对位置信息、各自的有效可泊面积,所述相对位置信息包括:两者的中心点距离、两者最小外接框的对角线;
14、根据所述相对位置信息、各自的有效可泊面积,利用改进的iou算法公式计算所述超声波车位空间、视觉车位空间之间的相交区域面积和合并区域面积的修正比值;
15、将所述修正比值与一预先标定的阈值进行比较,当所述修正比值大于所述阈值时,则将超声波车位空间、视觉车位空间中的任一个作为当前的融合车位;否则,将所述超声波车位空间、视觉车位空间的重叠区域作为当前的融合车位;
16、输出当前的融合车位的类型以及位置信息。
17、其中,所述根据所述相对位置信息、各自的有效可泊面积,利用改进的iou算法公式计算所述超声波车位空间、视觉车位空间之间的相交区域面积和合并区域面积比值,进一步包括:
18、利用下述改进的iou算法公式计算两者的修正比值ciou:
19、
20、
21、
22、
23、其中,ρ(p1,p2)为超声波车位空间p1和视觉车位空间p2中心点坐标的欧式距离;c为包含p1和p2的最小外接框的对角线长度;s1为超声波车位空间的有效可泊面积;s2为视觉车位空间的有效可泊面积;α为权重函数,v为度量宽高比一致性的函数;p1w和p1h分别为超声波车位空间p1的宽和高,p2w和p2h分别为超声波车位p2的宽和高。
24、相应地,本发明的另一方面,还提供一种用于apa泊车场景的车位融合系统,其至少包括:
25、超声波车位识别单元,用于使用车载的超声波传感器对当前停车空位进行车位空间识别,确定有效的超声波车位空间;
26、视觉车位识别单元,用于使用车载的环视摄像头对所述停车空位进行识别,确定有效的视觉车位空间;
27、融合处理单元,用于根据所述超声波车位空间、视觉车位空间两者之间的重叠比例、图形距离、形状相似度关系,对所述超声波车位空间和视觉车位空间进行融合处理,获得当前停车空位的融合车位并输出。
28、其中,所述融合处理单元进一步包括:
29、参数获取单元,用于根据所述有效的超声波车位空间、视觉车位空间,计算两者的相对位置信息、各自的有效可泊面积,所述相对位置信息包括:两者的中心点距离、两者最小外接框的对角线;
30、计算单元,用于根据所述相对位置信息、各自的有效可泊面积,利用改进的iou(交集和并集比值)算法计算所述超声波车位空间、视觉车位空间之间的相交区域面积和合并区域面积的修正比值;
31、比较处理单元,用于将所述修正比值与一预先标定的阈值进行比较,当所述修正比值大于所述阈值时,则将超声波车位空间、视觉车位空间中的任一个作为当前的融合车位;否则,将所述超声波车位空间、视觉车位空间的重叠区域作为当前的融合车位;
32、输出单元,用于输出当前的融合车位的类型以及位置信息。
33、其中,所述计算单元利用下述改进的iou算法公式计算两者的修正比值ciou:
34、
35、
36、
37、
38、其中,ρ(p1,p2)为超声波车位空间p1和视觉车位空间p2中心点坐标的欧式距离;c为包含p1和p2的最小外接框的对角线长度;s1为超声波车位空间的有效可泊面积;s2为视觉车位空间的有效可泊面积;α为权重函数,v为度量宽高比一致性的函数;p1w和p1h分别为超声波车位空间p1的宽和高,p2w和p2h分别为超声波车位p2的宽和高。
39、相应地,本发明的再一方面,还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如前述的方法的步骤。
40、相应地,本发明的又一方面,还提供一种车辆,其上至少设置有apa泊车装置,在所述apa泊车装置中部署有如前述的系统。
41、实施本发明实施例,具有如下的有益效果:
42、本发明提供一种用于apa泊车场景的车位融合方法、系统、存储介质及车辆,通过利用超声波传感器和视觉传感器分别识别出超声波车位空间、视觉车位空间;然后利用改进的iou算法,综合考虑超声车位和线车位之间的重叠比例、图形距离、形状相似度的关系,再确定所采用的车位的融合策略,最后获得最终的融合车位信息。本方法综合利用了超声识别和视觉识别的优点,能够得出更加准确、稳定的融合策略,从而可以提高apa泊车的成功率。
43、本发明实施例中所采用的改进的iou算法,在现有的iou算法中加入两种车位空间的图形距离、形状相似度等因素,可以精确拟合计算获得超声波车位空间、视觉车位空间重合度大小方面的量化数据,从而使融合获得的最终可泊车位的精确度更高、鲁棒性好,泛化能力强。
44、实施本发明的方法,可以应用于各种apa融合泊车场景中,从而有效地提高泊车场景中可泊车位检测的成功率,提高泊车的效率,同时可避免车位资源的浪费。
- 还没有人留言评论。精彩留言会获得点赞!