一种目标跟踪车辆选择方法、设备和存储介质与流程
本技术涉及数据处理,特别是涉及一种目标跟踪车辆选择方法、设备和存储介质。
背景技术:
1、近年来,自动驾驶辅助系统发展迅速,其中,自动驾驶辅助系统在使用过程中,需要确定要跟踪的目标跟踪车辆,以使自车能够跟踪目标跟踪车辆行驶,其中,目标跟踪车辆的准确确定直接影响自动驾驶辅助系统的使用安全性。因此,如何准确确定自车要跟踪的目标跟踪车辆,至关重要。
技术实现思路
1、本技术主要解决的技术问题是提供一种目标跟踪车辆选择方法、设备和存储介质,能够提升确定目标跟踪车辆的准确性。
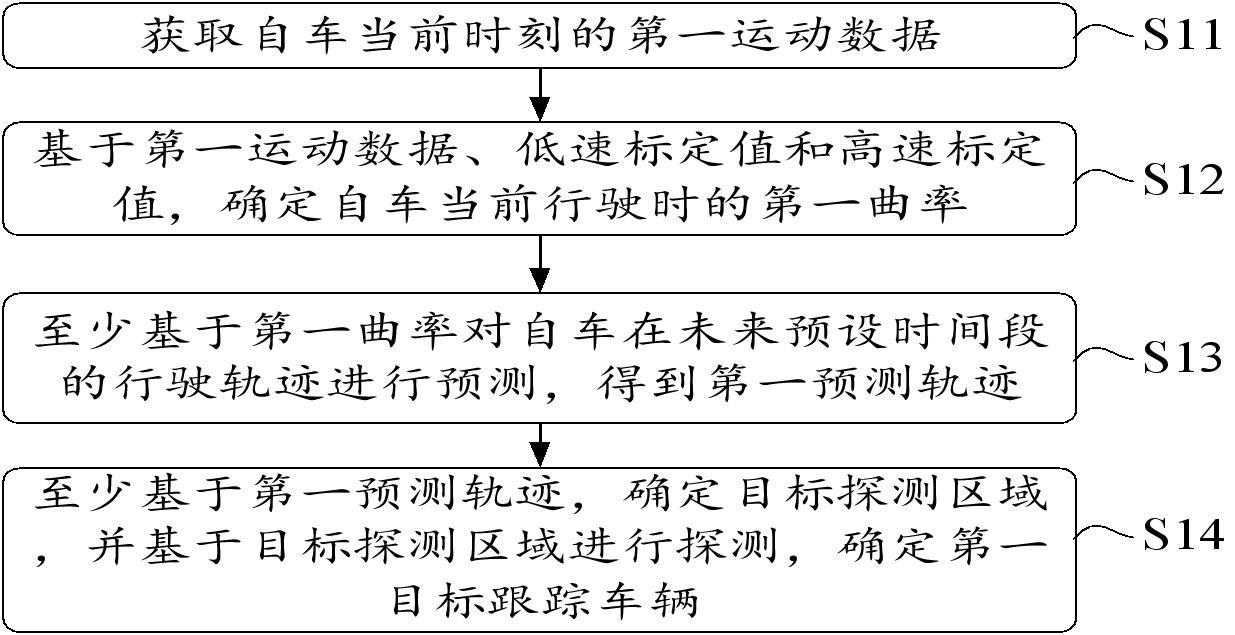
2、为解决上述技术问题,本技术采用的一个技术方案是:提供一种目标跟踪车辆选择方法,该方法包括:获取自车当前时刻的第一运动数据;基于第一运动数据、低速标定值和高速标定值,确定自车当前行驶时的第一曲率;至少基于第一曲率对自车在未来预设时间段的行驶轨迹进行预测,得到第一预测轨迹;至少基于第一预测轨迹,确定目标探测区域,并基于目标探测区域进行探测,确定第一目标跟踪车辆。
3、其中,在至少基于第一曲率对自车在未来预设时间段的行驶轨迹进行预测,得到第一预测轨迹前,该方法还包括:基于第一运动数据、低速标定值和高速标定值,确定自车当前行驶时的第一曲率变化率;至少基于第一曲率对自车在未来预设时间段的行驶轨迹进行预测,得到第一预测轨迹,包括:基于第一曲率和第一曲率变化率,预测得到第一预测轨迹。
4、其中,第一运动数据至少包括当前时刻自车的行驶速度;基于第一运动数据、低速标定值和高速标定值,确定自车当前行驶时的第一曲率,包括以下一种情况:响应于行驶速度小于或者等于低速标定值,获取自车的第一横摆角速度,并获取第一横摆角速度与行驶速度的第一比值,将第一比值作为自车的第一曲率;响应于行驶速度大于或者等于高速标定值,获取自车的第二横摆角速度,并获取第二横摆角速度与行驶速度的第二比值作,将第二比值为自车的第一曲率;响应于行驶速度大于低速标定值、且小于高速标定值,确定第一横摆角速度影响第一曲率的第一权重、以及第二横摆角速度影响第一曲率的第二权重,并利用第一权重、第二权重对第一横摆角速度和第二横摆角速度进行加权处理,得到加权横摆角速度,以及获取加权横摆角速度与行驶速度的第三比值,作为自车的第一曲率。
5、其中,确定第一横摆角速度影响第一曲率的第一权重、以及第二横摆角速度影响第一曲率的第二权重,包括:获取行驶速度与低速标定值的第一差值、以及高速标定值与低速标定值的第二差值;获取第一差值和第二差值的第四比值,并将第四比值作为第二权重;基于第二权重,确定第一权重;其中,第一权重与第二权重负相关。
6、其中,第一运动数据包括当前时刻自车的行驶速度、车辆参数和前轮转角变化量;基于第一运动数据、低速标定值和高速标定值,确定自车当前行驶时的第一曲率变化率,包括:基于车辆参数和前轮转角变化量,确定自车的横摆角加速度参考值;基于行驶速度、低速标定值和高速标定值,确定当前时刻自车的横摆角加速度的权重关联参数,其中,横摆角加速度与权重关联参数负相关;基于权重关联参数、横摆角加速度参考值,确定当前时刻自车的横摆角加速度;获取横摆角加速度与行驶速度的第五比值,将第五比值作为第一曲率变化率。
7、其中,基于行驶速度与低速标定值和高速标定值的关系,确定当前时刻自车的横摆角加速度的权重关联参数,包括以下一者:响应于行驶速度小于或者等于低速标定值,确定权重关联参数为第一常数;响应于行驶速度大于或者等于高速标定值,确定权重关联参数为第二常数;响应于行驶速度大于低速标定值、且小于高速标定值,获取行驶速度与低速标定值的第一差值、以及高速标定值与低速标定值的第二差值;获取第一差值和第二差值的第四比值,并将第四比值作为权重关联参数。
8、其中,未来预设时间段包括多个预测时间段,各预测时间段由多个未来时间点组成;基于第一曲率和第一曲率变化率,预测得到第一预测轨迹,包括:基于第一曲率、第一曲率变化率、以及不同时间点第一曲率变化率的预设影响参数,确定各未来时间点的第二曲率,不同时间点包括当前时刻和各未来时间点;基于第一曲率和各第二曲率,确定各预测时间段分别对应的若干控制点的坐标;利用各预测时间段分别对应的若干控制点的坐标,确定第一预测轨迹。
9、其中,基于第一曲率、第一曲率变化率、以及不同时间点第一曲率变化率的预设影响参数,确定各未来时间点的第二曲率,包括:对于各未来时间点,确定未来时间点的前一时间点的第三曲率、以及不同时间点对应的预设影响参数;其中,若前一时间点为当前时刻,则将第一曲率作为第三曲率,若前一时间点不为当前时刻,则前一时间点对应的第二曲率为第三曲率;获取第一曲率变化率与对应的预设影响参数的乘积;确定第三曲率与乘积的加和结果,并将加和结果作为未来时间点的第二曲率。
10、其中,第一运动数据包括当前时刻自车的行驶速度;基于第一曲率和各第二曲率,确定各预测时间段分别对应的若干控制点的坐标,包括:响应于行驶速度大于或者等于预设速度阈值,基于第一曲率和各第二曲率,确定各预测时间段分别对应的若干控制点的坐标。
11、其中,第一运动数据包括当前时刻自车的行驶速度;至少基于第一曲率对自车在未来预设时间段的行驶轨迹进行预测,得到第一预测轨迹,包括:响应于行驶速度小于预设速度阈值,基于最短安全探测距离和第一曲率,确定自车的航向角变化量,航向角变化量为自车从当前位置行驶至最短安全探测距离对应的终点位置时,当前位置和终点位置的航向角变化量;基于航向角变化量和第一曲率对应的曲率半径,确定若干控制点的位置。
12、其中,在至少基于第一预测轨迹,确定目标探测区域前,包括:响应于当前帧、以及当前帧的前一历史帧中存在第二目标跟踪车辆,获取当前时刻第二目标跟踪车辆相对自车的第二运动数据,其中,第二目标跟踪车辆为前一历史帧中的第一目标跟踪车辆,第二运动数据包括位置数据和夹角中的至少一者;基于第二运动数据和第一运动数据,确定第二预测轨迹,第二预测轨迹表征自车按照第一运动数据行驶至第二目标跟踪车辆处的预测轨迹;至少基于第一预测轨迹,确定目标探测区域,包括:基于第一预测轨迹和第二预测轨迹,确定目标探测区域。
13、其中,第一预测轨迹包含若干轨迹点;基于第一预测轨迹和第二预测轨迹,确定目标探测区域,包括:将第二预测轨迹的至少部分轨迹段作为第一探测中心线,并基于第一预设探测数据,分别在第一探测中心线两侧确定一条第一探测边界线;确定第一轨迹点数量与第二轨迹点数量的比值,其中,第一轨迹点数量为第一预测轨迹中位于两条第一探测边界线间的轨迹点的数量,第二轨迹点数量为第一预测轨迹包含的轨迹点总数量;基于比值,确定第一预测轨迹或第二预测轨迹为第二探测中心线;基于第二探测中心线、自车的行驶情形和自车的行驶情形对应的第二预设探测数据,确定目标探测区域。
14、其中,基于比值,确定第一预测轨迹或第二预测轨迹为第二探测中心线,包括以下一者:响应于比值小于或者等于预设阈值,确定第一预测轨迹为第二探测中心线;响应于比值大于预设阈值,确定第二预测轨迹为第二探测中心线。
15、为解决上述技术问题,本技术采用的再一个技术方案是:提供一种电子设备,包括相互耦接的存储器和处理器,存储器存储有程序指令;处理器用于执行存储器中存储的程序指令,以实现上述方法。
16、为解决上述技术问题,本技术采用的又一个技术方案是:提供一种计算机可读存储介质,用于存储程序指令,该程序指令能够被执行以实现上述方法。
17、上述方案,先根据自车当前时刻的第一运动数据、低速标定值和高速标定值,确定车当前行驶时的第一曲率,再至少基于第一曲率预测得到自车未来预设时间段的第一预测轨迹,且在至少基于第一预测轨迹,确定目标探测区域后,根据确定的目标探测区域进行目标跟踪车辆的选择。其中,相比于只利用第一运动数据确定第一曲率的方式,本技术根据自车当前时刻的第一运动数据、低速标定值和高速标定值确定的第一曲率更加准确,进而在至少基于第一曲率确定目标探测区域后,基于目标探测区域进行探测确定的第一目标跟踪车辆也更加准确,尤其是在无车道线场景下,能够准确地确定目标跟踪车辆。
- 还没有人留言评论。精彩留言会获得点赞!