零重力座椅防夹调节的控制装置、方法、车辆及存储介质与流程
本发明涉及车辆座椅控制,具体涉及一种零重力座椅防夹调节的控制装置、方法、车辆及存储介质。
背景技术:
1、随着人们对乘坐舒适性需求的提升,一种能通过调整座椅姿态,实现乘员身体各部位处于高度放松状态的零重力座椅,运用愈加广泛。同时,在有限的车内空间进行零重力座椅自动调节,带来的座椅夹伤问题也不容忽视。人们既希望体验零重力座椅自动调节带来的舒适便利,又希望零重力座椅在自动调节的过程中,具备防夹功能,预防夹伤。
2、如专利文献cn113147531a公开了一种紧凑型多向调节零重力座椅骨架,包括底座,该底座上方设置有座框,座框后部通过调角器连接有靠背骨架,座框的前部和后部分别在底座之间设有座框调节连杆,座框调节连杆均在竖直面内转动,每根座框调节连杆与底座分别通过铰接轴铰接,位于座框后部的座框调节连杆与座框铰接,位于前部的座框调节连杆与座框通过倾角调节连杆连接,位于前部和后部的座框调节连杆分别连接有转动驱动机构,同一侧的座框的座框边板和靠背骨架的靠背边板均设置有加强结构,该侧靠背边板后侧设置有用于引导安全带滑动的导向约束机构。该紧凑型多向调节零重力座椅骨架能够实现座框高度调节和倾角调节,并为座框提供稳定支撑,且保证安全带系统的安全性。但该紧凑型多向调节零重力座椅骨架采用直接给座椅电机通电,驱动座椅电机,没有考虑防夹功能,在调节过程中,遇到障碍物后,电机还会持续工作,直至电流超过电机保护极限方才停止,此时已对乘客产生较大的压迫和伤害。
3、因此,有必要开发一种新的零重力座椅防夹调节的控制装置、方法、车辆及存储介质。
技术实现思路
1、本发明的目的在于提供一种零重力座椅防夹调节的控制装置、方法、车辆及存储介质,能主动帮助用户识别零重力座椅的防夹调节位置,以实现自动防夹调节。
2、第一方面,本发明所述的一种零重力座椅防夹调节的控制装置,包括零重力座椅总成、边界座椅总成、乘员信息获取模块和座椅控制器,座椅控制器分别与零重力座椅总成、边界座椅总成和乘员信息获取模块连接;
3、所述座椅控制器通过接收来自零重力座椅总成的开关调节信号及位置信号,边界座椅总成的位置信号及乘坐信号,以及乘员信息获取模块识别的乘客身高、体重及乘员位置信息,计算出零重力座椅总成的防夹调节位置,并基于该防夹调节位置驱动零重力座椅总成自动调节,以实现零重力座椅总成的自动防夹调节;
4、其中,所述乘员信息获取模块包括摄像头模块和屏幕模块中的至少一种。
5、可选地,当所述零重力座椅总成布置在主驾,所述边界座椅总成为主驾侧后排座椅时;
6、或当所述零重力座椅总成布置在副驾,所述边界座椅总成为副驾侧后排座椅时;此时零重力座椅夹伤风险主要受限车内空间,为保证前排零重力空间使用的最大化,此时默认边界座椅总成不发生位置变化,即所述边界座椅总成只需要集成有压力传感器即可,该压力传感器与座椅控制器连接;
7、所述压力传感器反馈电信号至座椅控制器,用于座椅控制器判断边界座椅总成的乘坐信号。
8、可选地,当所述零重力座椅总成布置在主驾侧后排,边界座椅总成为主驾座椅时;
9、或零重力座椅总成布置在副驾侧后排,边界座椅总成为副驾座椅时;此时零重力座椅夹伤风险主要来源于前排座椅位置,此时需考虑边界座椅总成位置及位置变化带来的零重力座椅夹伤问题,即所述边界座椅总成需要集成有压力传感器、前排靠背角度调节模块、前排座椅前后调节模块和前排座椅调节开关,所述压力传感器、前排靠背角度调节模块、前排座椅前后调节模块和前排座椅调节开关分别与座椅控制器连接;
10、所述压力传感器反馈电信号至座椅控制器,用于座椅控制器判断边界座椅总成的乘坐信号;
11、所述前排座椅调节开关用于进行座椅位置调节并获取位置调节开关量,输出座椅调节信号至座椅控制器,用于座椅控制器判断座椅是否进行手动调节;
12、所述前排靠背角度调节模块、前排座椅前后调节模块均采用霍尔电机驱动,各霍尔电机将位置信号转换成霍尔信号并输出至座椅控制器,用于座椅控制器判断边界座椅总成的位置信号并且接收座椅控制器的电信号驱动前排靠背角度调节模块、前排座椅前后调节模块工作。
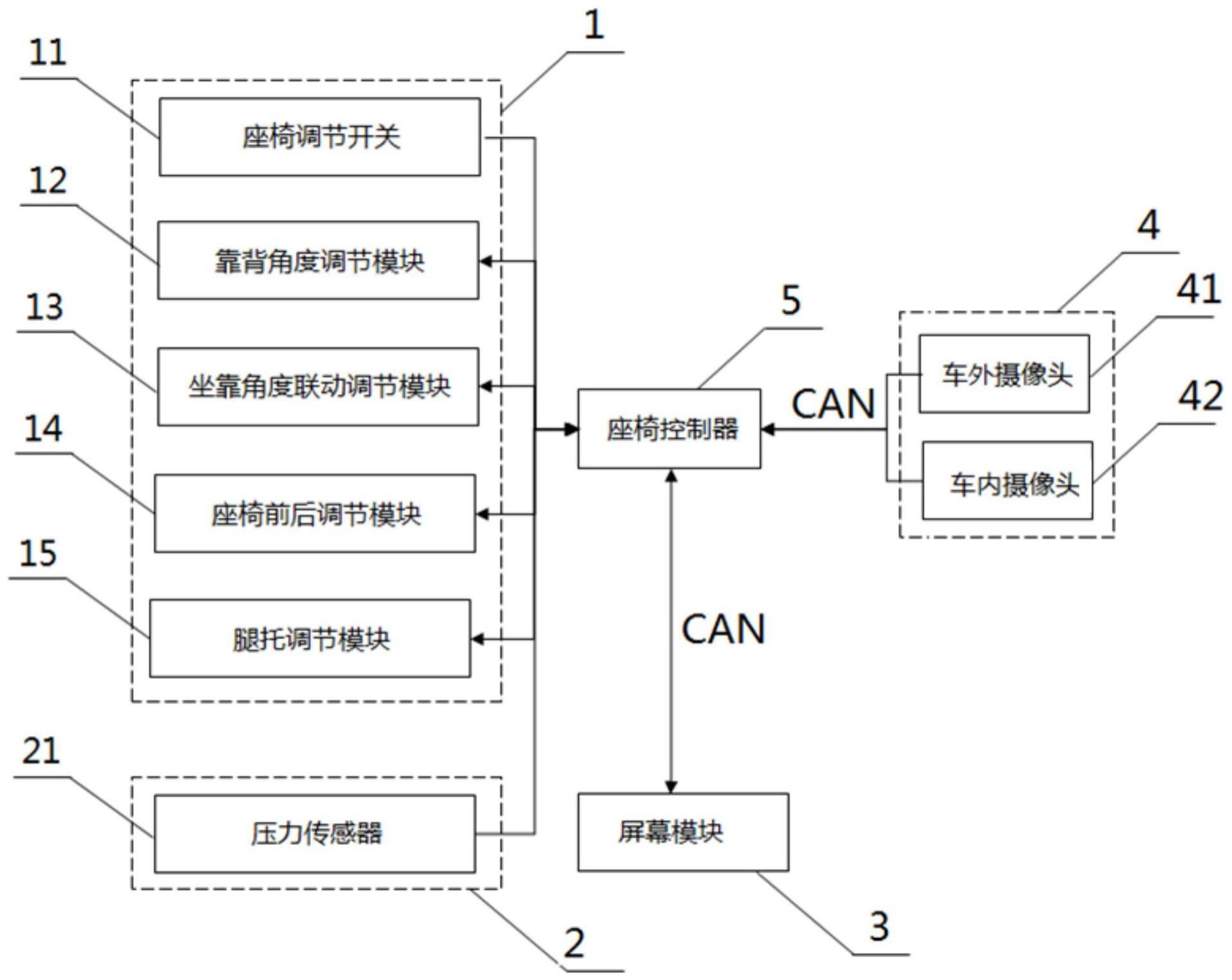
13、可选地,所述零重力座椅总成集成有座椅调节开关、靠背角度调节模块、坐靠角度联动调节模块、座椅前后调节模块和腿托调节模块,所述座椅调节开关、靠背角度调节模块、坐靠角度联动调节模块、座椅前后调节模块和腿托调节模块分别与座椅控制器连接;
14、所述座椅调节开关用于进行座椅位置调节并获取位置调节开关量,输出座椅调节信号至座椅控制器,用于座椅控制器判断座椅是否进行手动调节;
15、所述靠背角度调节模块、坐靠角度联动调节模块、座椅前后调节模块、腿托调节模块均采用霍尔电机驱动,以实现零重力座椅总成的位置及姿态调节,各霍尔电机将位置信号转换成霍尔信号并输出至座椅控制器,用于座椅控制器判断识别零重力座椅总成的位置并且接收座椅控制器的电信号来驱动靠背角度调节模块、坐靠角度联动调节模块、座椅前后调节模块及腿托调节模块工作。
16、可选地,当控制装置包括摄像头模块时,所述摄像头模块包括车外摄像头和车内摄像头,车外摄像头和车内摄像头分别与座椅控制器连接;
17、所述车外摄像头用于识别乘客身高、体重信息并输入给座椅控制器;
18、所述车内摄像头用于识别乘员位置信息并输入给座椅控制器。
19、可选地,当控制装置包括屏幕模块时,所述屏幕模块接收手动输入的乘客身高及体重信息并输入至座椅控制器,以避免摄像头模块对乘客身高及体重信息获取失败或者无摄像头模块情况;并基于座椅控制器发出的提示信息进行安全提示。
20、第二方面,本发明所述的一种零重力座椅防夹调节的控制方法,采用如本发明所述的零重力座椅防夹调节的控制系统,当零重力座椅总成布置在前排座椅位置,边界座椅总成为后排座椅,且边界座椅总成位于零重力座椅总成的正后方时,其控制方法包括以下步骤:
21、在零重力座椅总成自动调节时,座椅控制器实时获取零重力座椅位置信息、零重力座椅开关信号、乘客身高及体重信息、边界座椅总成乘员乘坐信息、车内乘员位置信息;并基于所获取的信息计算出零重力座椅总成的防夹调节位置,并基于该防夹调节位置驱动零重力座椅总成自动调节。
22、可选地,所述座椅控制器判断零重力座椅的防夹调节位置方法如下:
23、通过实车环境标定,确认零重力座椅总成乘客不同人群身高及体重、边界座椅总成乘客不同人群身高及体重、边界座椅乘员乘坐信息、零重力座椅后方有无乘员站立与零重力座椅调节位置对应关系,形成数据库,并录入座椅控制器;
24、座椅控制器通过采取当前零重力座椅位置参数与数据库零重力座椅调节位置做比对,得出零重力座椅总成中各调节模块的参数差值,并驱动零重力座椅总成调节。
25、第三方面,本发明所述的一种零重力座椅防夹调节的控制方法,采用如本发明所述的零重力座椅防夹调节的控制系统,当零重力座椅总成布置在后排,边界座椅总成为前排座椅,且边界座椅总成位于零重力座椅总成的正前方时,其控制方法包括以下步骤:
26、在零重力座椅总成自动调节时,座椅控制器实时采集零重力座椅位置信息、零重力座椅开关信号、乘客身高及体重信息、边界座椅总成乘员乘坐信息、车内乘员位置信息、边界座椅总成位置信息和边界座椅开关信号;
27、当检测到边界座椅总成的前排座椅调节开关调整时,优先满足边界座椅总成,待边界座椅总成的前排座椅调节开关调整停止时,座椅控制器采集边界座椅总成的位置信号,用于判断零重力座椅总成的防夹调节位置,并基于该防夹调节位置驱动零重力座椅总成调自动节;
28、当检测到边界座椅总成的前排座椅调节开关未调整且未乘坐乘客时,座椅控制器驱动边界座椅总成至标定位置,提供空间给后排乘客,使得零重力座椅自动调节角度更大,乘客体验更舒适;
29、当检测到边界座椅总成的前排座椅调节开关未调整且乘坐乘客时,座椅控制器采集边界座椅总成的位置参数,用于判断零重力座椅总成的防夹调节位置,并基于该防夹调节位置驱动零重力座椅总成自动调节。
30、可选地,所述座椅控制器判断零重力座椅的防夹调节位置方法如下:
31、通过实车环境标定,确认零重力座椅总成乘客不同人群身高及体重、边界座椅总成乘客不同人群身高及体重、边界座椅位置参数信息、边界座椅乘员乘坐信息与零重力座椅调节位置对应关系,形成数据库,并录入座椅控制器;座椅控制器通过采取当前零重力座椅位置参数与数据库零重力座椅调节位置做比对,得出零重力座椅总成中各调节模块的参数差值,并驱动零重力座椅总成调节。
32、第四方面,本发明所述的一种车辆,采用如本发明所述的零重力座椅防夹调节的控制装置。
33、第五方面,本发明所述的一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时能执行如本发明所述的零重力座椅防夹调节的控制方法的步骤。
34、本发明具有以下优点:
35、(1)本发明提出了零重力座椅总成自动调节带来的乘员夹伤安全风险,加强了乘客在零重力座椅使用过程的安全保障;
36、(2)本发明的智能化程度高,能够根据零重力座椅总成位置、边界座椅总成位置及乘坐信息、车内乘客身高及体重信息不同,实现了零重力自动调节过程的安全防夹,并做安全提醒,避免了用户无法识别乘员夹伤安全风险或者为了避免夹伤需手动调整零重力座椅位置的不好体验;
37、(3)本发明的扩展性强,应用范围广,能够适用于零重力座椅在车内不同布置位置。
- 还没有人留言评论。精彩留言会获得点赞!