一种基于驾驶辅助的车辆过弯控制方法、控制装置及设备与流程
本技术涉及车辆行驶控制,尤其涉及一种基于驾驶辅助的车辆过弯控制方法、控制装置及设备。
背景技术:
1、在汽车智能化的高速发展下,驾驶辅助系统已被广泛开发应用,基于自动驾驶车辆上高精度传感器和控制器的支持,车辆预见性巡航、自适应巡航等纵向运动控制功能也已拓展到越来越多的行驶工况中,极大地减轻了驾驶员的劳动强度,增加了驾驶的舒适性与经济性。
2、但是由于当前大部分车辆的横纵向控制相互独立,因此,虽然纵向运动控制得到越来越多的扩展,但是依然会由于横向控制相互独立造成的车辆控制策略受限,从而使得车辆无法覆盖相对复杂的道路环境,比如,自动驾驶车辆在高速行驶过程中,前方道路出现弯道或连续弯道,如果不及时主动降低车速过弯,车辆重心容易发生横向偏移,尤其是重型汽车重心较高载重较大,若此时车辆以较高的车速过弯往往会造成车辆侧滑,严重时会导致翻车。
3、基于此,目前亟需要一种控制方法以使得车辆,尤其是重型汽车,在遇到复杂的道路环境(例如出现弯道或者连续弯道等复杂环境)时能够避免危险出现。
技术实现思路
1、本技术提供一种基于驾驶辅助的车辆过弯控制方法、控制装置及设备,用以解决重型汽车在遇到复杂的道路环境时出现危险驾驶的问题。
2、第一方面,本技术提供一种基于驾驶辅助的车辆过弯控制方法,包括:
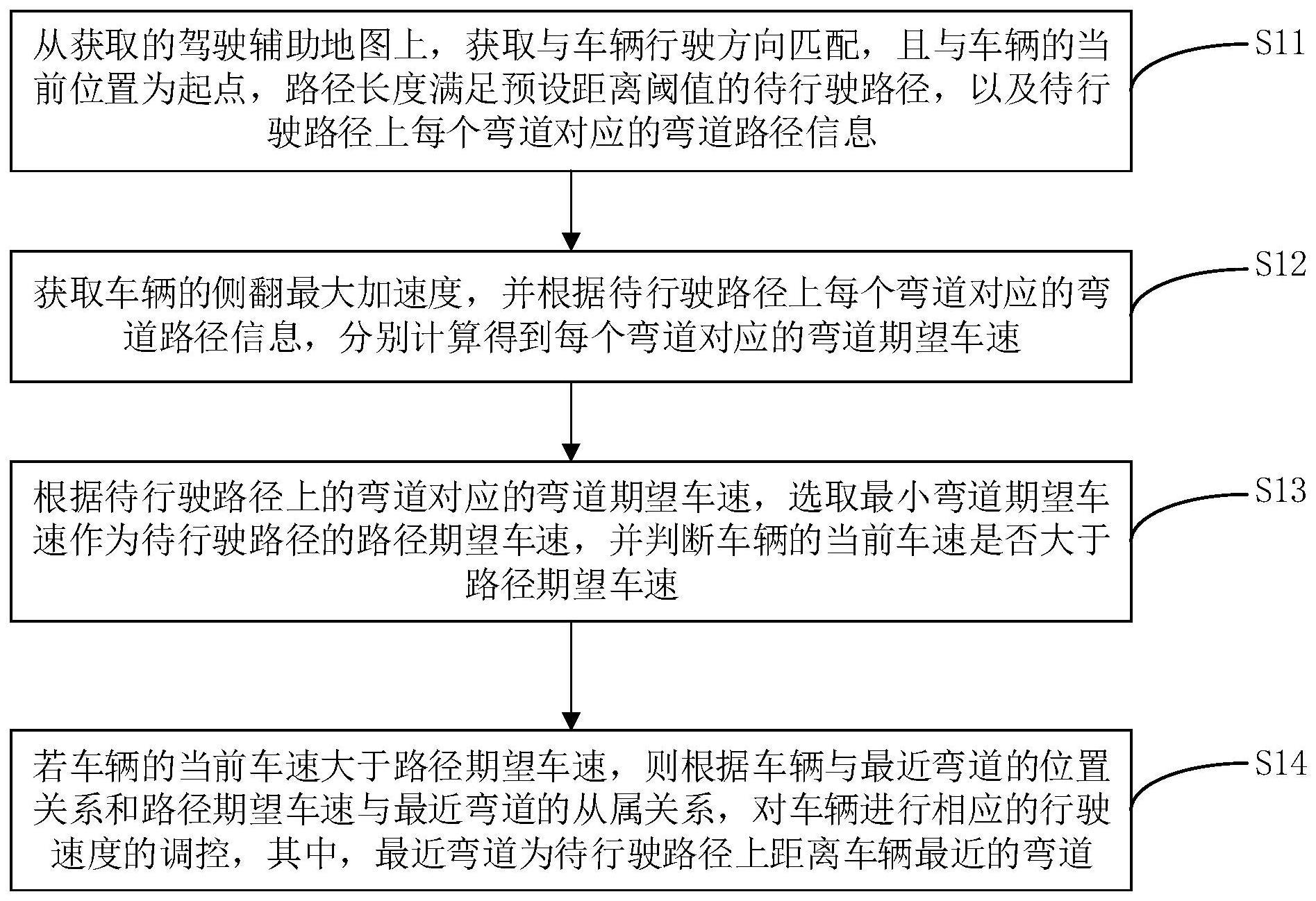
3、从获取的驾驶辅助地图上,获取与车辆行驶方向匹配,且与所述车辆的当前位置为起点,路径长度满足预设距离阈值的待行驶路径,以及所述待行驶路径上每个弯道对应的弯道路径信息;
4、获取所述车辆的侧翻最大加速度,并根据所述待行驶路径上每个弯道对应的弯道路径信息,分别计算得到每个所述弯道对应的弯道期望车速;
5、根据所述待行驶路径上的弯道对应的弯道期望车速,选取最小弯道期望车速作为所述待行驶路径的路径期望车速,并判断所述车辆的当前车速是否大于路径期望车速;
6、若所述车辆的当前车速大于所述路径期望车速,则根据所述车辆与最近弯道的位置关系和路径期望车速与所述最近弯道的从属关系,对所述车辆进行相应的行驶速度的调控,其中,所述最近弯道为所述待行驶路径上距离所述车辆最近的弯道。
7、在一种可能的设计中,所述若所述车辆的当前车速大于所述路径期望车速,则根据所述车辆与最近弯道的位置关系和路径期望车速与所述最近弯道的从属关系,对所述车辆进行相应的行驶速度的调控,包括:
8、若所述车辆的当前车速大于路径期望车速,则在所述车辆与所述最近弯道的位置关系为所述车辆在所述最近弯道外,所述路径期望车速与所述最近弯道的从属关系为所述路径期望车速属于或不属于最近弯道时,对所述车辆对进行减速控制;
9、或者,
10、若所述车辆的当前车速大于路径期望车速,则在所述车辆与所述最近弯道的位置关系为所述车辆在所述最近弯道内,且所述路径期望车速与所述最近弯道的从属关系为所述路径期望车速属于最近弯道时,对车辆进行匀速控制;
11、或者,
12、若所述车辆的当前车速大于路径期望车速,则在所述车辆与所述最近弯道的位置关系为所述车辆在所述最近弯道内,且所述路径期望车速与所述最近弯道的从属关系为所述路径期望车速不属于所述最近弯道时,限制所述车辆的发动机扭矩输出。
13、在一种可能的设计中,所述车辆的侧翻最大加速度的获取包括:
14、根据所述车辆的行驶信息,获取所述车辆的侧翻极限横向加速度;
15、基于所述车辆的侧翻极限横向加速度aymax,采用如下公式:
16、ay=μ×aymax
17、得到所述车辆的侧翻最大加速度ay;
18、其中,μ为预设的加速度裕量系数。
19、在一种可能的设计中,所述获取所述车辆的侧翻最大加速度,并根据所述待行驶路径上每个弯道对应的弯道路径信息,分别计算得到每个所述弯道对应的弯道期望车速,包括:
20、获取所述弯道路径信息中的每个弯道路径点对应的弯道路径点曲率k;
21、根据车辆的侧翻最大加速度ay,采用如下公式:
22、
23、得到每个所述弯道路径点对应的路径点期望车速v,并从多个路径点期望车速中选取数值最小的路径点期望车速作为所述弯道的弯道期望车速。
24、在一种可能的设计中,所述根据所述车辆的行驶信息,获取所述车辆的侧翻极限横向加速度,包括:
25、通过预置称重传感器获取所述车辆当前重量,并查询预置车辆信息得到所述车辆的型号、长度;
26、根据所述车辆当前重量、型号和长度,查询预置极限横向加速度表,得到所述车辆的侧翻极限横向加速度;或
27、根据所述车辆当前重量、型号和长度,计算得到车辆重心位置,并根据车辆重心位置、车辆当前重量以及所述车辆的历史行驶数据,得到所述车辆的侧翻极限横向加速度。
28、在一种可能的设计中,所述对所述车辆进行相应的行驶速度的调控,包括:
29、采用pi控制法,根据预置的控制参数调节发动机和缓速器的扭矩,实现对车辆减速、匀速或加速的行驶速度调控。
30、在一种可能的设计中,所述从获取的驾驶辅助地图上,获取与车辆行驶方向匹配,且与所述车辆的当前位置为起点,路径长度满足预设距离阈值的待行驶路径,以及所述待行驶路径上每个弯道对应的弯道路径信息,包括:
31、以所述车辆的当前位置为起点,沿车辆行驶方向从所述驾驶辅助地图上,获取待行驶路径和所述待行驶路径对应的待行驶路径信息,其中,待行驶路径长度与预设的距离阈值相同;
32、根据所述待行驶路径信息,获取所述待行驶路径上标识为弯道的弯道路径点和所述弯道路径点对应的弯道路径信息;或
33、根据所述待行驶路径信息,得到所述待行驶路径上每个路径点对应的路径点曲率,依次判断并筛选路径点曲率大于预设曲率阈值的路径点,所述路径点曲率大于预设曲率阈值的路径点属于弯道且所述路径点对应的路径信息为弯道路径信息。
34、第二方面,本技术提供一种车辆过弯控制装置,包括:
35、路径信息获取模块,用于从获取的驾驶辅助地图上,获取与车辆行驶方向匹配,且与所述车辆的当前位置为起点,路径长度满足预设距离阈值的待行驶路径,以及所述待行驶路径上每个弯道对应的弯道路径信息;
36、弯道期望车速计算模块,用于获取所述车辆的侧翻最大加速度,并根据所述待行驶路径上每个弯道对应的弯道路径信息,分别计算得到每个所述弯道对应的弯道期望车速;
37、路径期望车速获取模块,用于根据所述待行驶路径上的弯道对应的弯道期望车速,选取最小弯道期望车速作为所述待行驶路径的路径期望车速,并判断所述车辆的当前车速是否大于路径期望车速;
38、车速控制模块,若所述车辆的当前车速大于所述路径期望车速,则用于根据所述车辆与最近弯道的位置关系和路径期望车速与所述最近弯道的从属关系,对所述车辆进行相应的行驶速度的调控,其中,所述最近弯道为所述待行驶路径上距离所述车辆最近的弯道。
39、第三方面,本技术提供一种电子设备,包括:
40、处理器,以及与所述处理器通信连接的存储器;
41、所述存储器存储计算机执行指令;
42、所述处理器执行所述存储器存储的计算机执行指令,以实现车辆过弯控制方法。
43、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现车辆过弯控制方法。
44、本技术提供的一种基于驾驶辅助的车辆过弯控制方法、控制装置及设备,本发明的方法通过实时获取待行驶路径和路径信息,确保系统能够在实时获取车辆所在位置的情况下,得知车辆即将行驶的道路路径信息。同时针对存在弯道的道路,做出相应的速度调整,确保行驶的稳定性和安全性,减少了事故的发生概率。根据侧翻最大加速度获取最大期望车速,使得在车速控制的参考不仅仅依赖弯道的曲率,也结合的车辆自身的状况;同时选择最小弯道期望车速作为路径期望车速,能够更好地适应多弯道路况,为车辆提供更高的稳定性和安全性。根据车辆与最近弯道位置关系和路径最大期望车速与最近弯道的从属关系,对车辆进行相应的行驶速度的调控。改变了原有的仅仅通过路径期望车速调整车辆当前车速的调整方式,增加更多的参考项,使得车辆对于多弯道,特别是路径期望车速不属于最近弯道的情况,有了更加符合复杂道路(例如多弯道)状况的控制策略。
- 还没有人留言评论。精彩留言会获得点赞!