基于数据驱动的燃料电池汽车实时能量管理方法
本发明属于燃料电池汽车能量管理,具体涉及一种基于数据驱动的燃料电池汽车实时能量管理方法。
背景技术:
1、车用燃料电池经过全球近十年的持续研发,已在体积与质量、能量转化效率、功率密度以及低温启动等方面取得突破性进展,预示着新一轮燃料电池汽车产业化浪潮即将到来。车用燃料电池系统是燃料电池汽车的核心部分,然而由于其成本高昂且存在性能衰减和寿命短等缺点,燃料电池汽车目前尚未实现大规模的商业应用。燃料电池中能量是不可逆的,且动态响应慢,难以适应变化剧烈的复杂驾驶工况,因此燃料电池汽车通常需要搭配多种动力源构成混合动力系统以此弥补单一动力源的不足;由于有多种动力源存在,能量管理策略是使系统可靠、稳定、高效工作的关键技术之一。混合动力驱动时,能量管理策略的设计至关重要。通过合理的能量分配,可以进一步提高燃料电池汽车的经济性,并成为解决燃料电池耐久性问题的突破口之一,因此学术界针对这一问题展开了广泛的研究。
2、目前国内外学者针对燃料电池混合动力汽车能量管理问题提出了许多控制算法,常见的两类能量管理控制策略为:基于规则和基于优化的控制策略。基于规则的方法通常是基于人类专业知识设计的规则,这种策略对实时驾驶条件不敏感,计算强度低、可靠性高、易于实现,一般用于实时应用,但它很大程度上依赖于工程经验,这使得寻找全面高质量的规则以适应不同的驾驶条件变得十分困难。在这种情况下,基于优化的策略逐渐出现,其从最佳控制角度解决能源管理问题。基于优化的策略通常分为两类:全局优化策略和实时优化策略。全局优化策略是基于整体的驾驶周期信息进行的,可以得到全局最优解,但其计算量大,无法实时应用。而实时优化策略与全局优化策略相比,虽然不能求出最优解,但是可以求出次优解,而且计算量则大大降低,具备实时应用的潜力。
3、虽然目前已经针对传统的混合动力汽车成功开发了许多能量管理策略,但相同的策略无法直接应用于燃料电池混合动力汽车上,因为燃料电池和传统内燃机之间存在巨大的差异。具体而言,大多数传统混合动力汽车的控制策略仅以燃油经济性作为首要优化目标,即为单目标优化问题。然而,燃料电池混合动力汽车是一个非常复杂的系统,在复杂的约束条件下,如何有效地管理混合动力系统的能量,并优化动力系统,以满足车辆的动力性能,同时兼顾整车燃料经济性和能源耐久性,是一个重要挑战。在解决该多目标能量管理问题时候一种常见的解决策略是采用基于优化的策略,试图从最佳控制角度解决能源管理问题,即尝试在所有可能解中寻找出最优解。然而在实现最优的能量管理策略时候又产生了工程上常见的问题:最优性与实时性之间的矛盾。
4、因此,为了实现能量管理策略实时性与最优性的平衡,本发明通过将数据驱动方法与传统的能量管理策略各自优势进行融合,利用传统的全局优化算法获取全局最优解,同时使用数据驱动方法来学习最优数据集的内部隐藏关系,从而实现对整车能量管理策略规律的准确表述。
技术实现思路
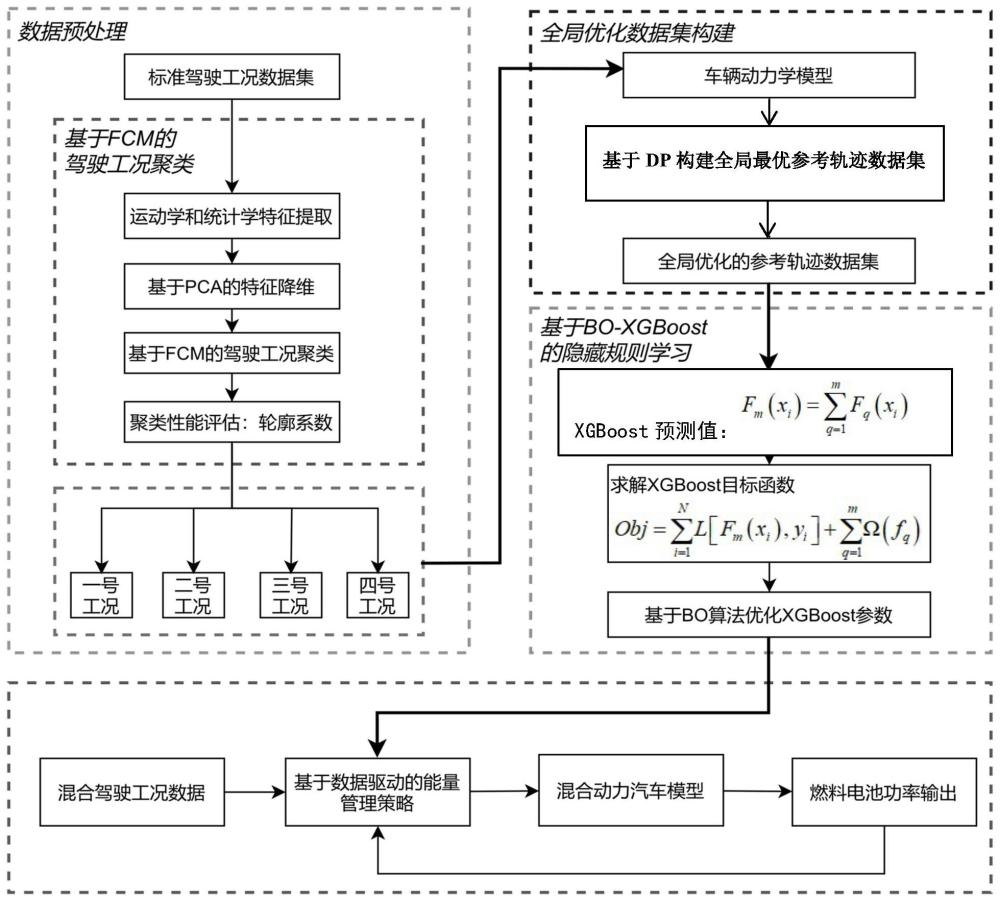
1、本发明的目的是为了实现能量管理策略的最优性与实时性之间的平衡,将全局优化策略与数据驱动方法紧密结合,提出了一种基于模糊c均值聚类和极限梯度提升算法的燃料电池混合动力汽车能量管理方法。该方法首先使用模糊c均值算法对标准驾驶工况数据集进行聚类,并将相同类别下的多种驾驶工况通过动态规划算法求解得到全局最优参考轨迹数据集;然后采用极限梯度提升算法学习最优参考轨迹数据集的内部隐藏关系,通过汇总多个基评估器的结果来实现对整车能量管理策略规律的准确表述。
2、为实现上述发明目的,本发明采用的技术方案如下:
3、一种基于数据驱动的燃料电池汽车实时能量管理方法,包括以下步骤:
4、s1、建立燃料电池混合动力汽车整车模型;
5、s2、基于fcm的驾驶工况聚类;
6、s2.1、标准驾驶工况数据分析与特征提取
7、选取至少40种常用标准驾驶工况,并分别进行特征参数的提取,得到驾工况特征数据。所述驾工况特征数据,包括运动学特征数据和统计学特征数据;所述运动学特征,包括:运行总时间、运行距离、最大速度、平均速度、运行平均速度、最大加速度、最大减速度、加速段平均加速度、减速段平均减速度、加速度标准差、减速度标准差;所述统计学特征,包括:加速比例、减速比例、匀速比例、怠速比例。
8、s2.2、pca特征降维
9、采用pca对驾驶工况特征数据进行降维,得到一组重要性从高到低排列的新特征;选取前七个新特征构建新的驾驶工况数据集。
10、s2.3、基于模糊c均值算法的驾驶工况聚类
11、采用模糊c均值算法对新的驾驶工况数据集进行聚类,并在聚类过程中引入轮廓系数指标评估聚类结果中的簇间离散程度和簇内稠密程度,从而得到聚类结果。
12、s3、基于dp构建全局最优参考轨迹数据集
13、基于步骤s2得到的聚类结果,分聚类使用动态规划算法构建全局最优参考轨迹数据集;
14、具体地,通过车辆动力学模型计算出各驾驶工况的需求功率,以等效氢耗最小为目标函数的动态规划算法来进行全局优化能量管理策略的求解,从而构建出同种类型驾驶工况的最优参考轨迹数据集。
15、s4、基于极限梯度提升算法学习隐藏规率
16、使用极限梯度提升算法在全局最优参考轨迹数据集上构建多个基评估器来学习功率分配的隐藏规律;通过汇总多个基评估器的结果,得到燃料电池汽车实时能量管理方法。
17、进一步地,步骤s3中,构建全局最优参考轨迹数据集的过程如下:
18、建立燃料电池氢气消耗模型mfc:
19、
20、其中,pfc表示燃料电池输出功率,拟合系数k1=1.526e-7、k2=-1.577e-5、k3=0.0004387、k4=0.009941、k5=0.04112。
21、建立蓄电池的等效氢气消耗模型mbat:
22、
23、其中,pbat表示蓄电池功率,ηdc/dc表示dc/dc转换器效率,η1表示蓄电池的放电充电效率,mh2表示氢气的摩尔质量,δh表示氢气的低热值。
24、结合燃料电池氢气消耗模型mfc和蓄电池的等效氢气消耗模型mbat,将评价燃料电池混合动力汽车性能的目标函数表示为:
25、
26、其中,u(k)表示第k个采样时刻燃料电池的输出功率pfc,x(k)表示第k个采样时刻为蓄电池荷电状态soc,k=0,1,2,…,k。优化目标函数使燃料电池混合动力汽车从初始时刻t0到终止时刻tf氢气消耗最小。
27、综上所述,建立基于动态规划算法的燃料电池混合动力汽车的数学求解模型,其状态转移方程如下所示:
28、
29、其中,soc(t)为t时刻的蓄电池荷电状态,t=k*tf,tf表示采样周期,t0为初始时刻,为初始时刻的蓄电池荷电状态,ηb为蓄电池效率,ibat为蓄电池电流,e为蓄电池电势,rbat为蓄电池内阻。
30、设置约束条件如下:
31、
32、其中,pfc_min、pfc(k)、pfc_max分别表示燃料电池输出功率下限、第k个采样时刻燃料电池输出功率、燃料电池输出功率上限;pbat_min、pbat(k)、pbat_max分别表示蓄电池电池功率下限、第k个采样时刻蓄电池功率、蓄电池功率上限;pdemand表示混合动力汽车功率需求值;socmin、soc(k)、socmax分别表示蓄电池soc下限、第k个采样时刻蓄电池soc值、蓄电池soc上限。
33、基于上述动态规划算法的目标函数、状态转移方程以及约束条件,整个求解过程分为两个阶段;首先采用整体最优的原则,通过逆向运算获得每个阶段的最佳状态轨迹、控制序列轨迹以及目标函数值,然后根据所得信息进行正向运算,得到每一时刻燃料电池和蓄电池的最佳功率分配结果,即得到初始时刻t0到终止时刻tf时段内各时刻的最优燃料电池功率输出pfc(t)和最优蓄电池soc(t)序列。
34、对同一聚类中的各驾驶工况分别计算得到t0到tf时段内各时刻的最优燃料电池功率输出pfc(t)和最优蓄电池soc(t)序列;然后将各时刻对应的速度v(t)、加速度a(t)、以及计算出的最优燃料电池功率输出pfc(t)和最优蓄电池soc(t)组成全局最优参考轨迹数据集。
35、进一步地,步骤4中,构建极限梯度提升算法模型时,利用贝叶斯优化算法的快速寻优能力,充分利用前一次的搜索结果,增加搜索效率,从而得到最优的超参数组合。
36、进一步地,步骤4中,采用的极限梯度提升算法为改进型的梯度提升树算法,其计算过程包括:
37、对于全局最优参考轨迹数据集中的第i个样本,当迭代到第m棵树时,预测值为:
38、
39、其中,fq(xi)表示第i个样本第q棵树的子模型预测值,q=1,2,3,…,m,fm(xi)为第i个样本第m棵树的子模型,fm-1(xi)为第i个样本第m-1棵树的子模型预测值。
40、设置如下目标函数:
41、
42、其中,正则项ω(fq)表示第q棵树子模型的复杂度,用于控制过拟合,yi表示第i个样本的真实值,l表示由预测值与真实值组成的损失函数。
43、对目标函数二阶泰勒公式展开,并进一步简化得到:
44、
45、其中,t表示树f的叶节点个数,正则项ω(fm)表示第m棵树的子模型fm的复杂度,gi、hi分别是损失函数l对fm(xi)的一阶、二阶导数。
46、设置基于树的复杂度作为正则项:
47、
48、其中,ws是叶子节点s的权重值,s=1,2,3,…,t,w是叶子节点的权重值向量,||w||2是向量w的l2范数的平方,γ是叶子树惩罚正则项、λ为叶子权重惩罚正则项。
49、进一步可以将目标函数写为:
50、
51、其中,i(s)={xi|q(xi)=s},q(xi)为第i个样本映射到叶节点上的编号。
52、进一步简化表达,令得到:
53、
54、若一棵树的结构已经确定,则各个节点内的样本(xi,yi,gi,hi)也是确定的,对每个叶节点权重值ws求导,得到极值时需满足:
55、
56、为求解得到的最优权重值。
57、在目标函数中代入所得的得到简化的最优目标函数公式为:
58、
59、本发明的有益效果如下:
60、(1)考虑到仅针对单一驾驶工况进行优化去学习其内部隐藏规律,会导致其无法应对复杂多变的情况。因此本发明考虑对40种不同驾驶工况进行学习来提高整个策略的泛化能力,但是由于不同驾驶工况之间的差异非常大,使用全局优化策略得到的功率分配方案的结果差距也非常大,若直接对优化后的功率分配方案进行学习会对在线能量管理策略的优化性能有非常大损失。因此,对驾驶工况数据进行分类是进行全局优化数据集隐藏规则提取的基础。模糊c均值算法为一种常用的无监督聚类方法,具有良好的抗噪性能和泛化能力,能很好对无标签数据进行划分,保证各类别“簇内差异小,簇外差异大”。
61、(2)考虑到全局优化数据集的高度非线性特性,以及燃料电池功率输出与各状态变量之间复杂的内在关系,因此规则学习策略需要具备强大的特征学习和表征能力。如何让所提策略在最优参考轨迹数据集中学习到的功率分配规则实现优化性能与泛化能力的平衡是本发明在方法设计时的考虑要素。极限梯度学习算法可以有效地解决上述问题。作为一种梯度提升的集成学习算法,xgboost可以很好地让提升树突破自身计算极限,实现运算快速,且可以准确地表达各变量之间的相互关系,被认为是在分类和回归上拥有超高性能的先进评估器。
62、(3)实验结果表明本发明所提策略总氢耗量比动态规划策略仅增加3.4%,而所提策略的计算时间仅为dp策略计算时间的1/6,说明本发明所提出的能量管理策略能够在实时应用的前提下,合理进行功率分配,实现提高燃油经济性的目的。
- 还没有人留言评论。精彩留言会获得点赞!